基于物联网技术的货车载荷实时监测系统设计
2022-08-02 11:00杨泽文李秦峰王宪保邱宝象屈亮亮
计算机测量与控制 2022年7期
杨泽文,侯 彬,李秦峰,王宪保,邱宝象,屈亮亮
(1.浙江工业大学 信息工程学院,浙江 杭州 310023; 2.万向钱潮股份有限公司,浙江 杭州 311215)
0 引言
目前,公路的超载检测装置大多设置在监测站,通过人为引导进入监测站或者收费站的指定位置,利用固定的分离式地磅[1]或者是无人值守[2]的称重方式对车辆进行载荷检测。这种检测方式局限于公路的指定地点,无法做到对车辆载荷的实时监控;检测时间长,需要车辆到达指定位置并等待载荷结果,对流量较大的公路而言十分不方便[3];占地空间大,需要将指定区域改造成地磅式的称重装置,额外占用公路空间;同时现有装置安装费时费力,检测成本高昂。
国内外已有许多学者针对车辆载重问题进行设计与研究。文献[4]首次提出了一种测量车辆载荷的方法,该方法利用位移传感器测量车架与车桥间的相对位移以此来测量出车辆的载荷情况,采用线性拟合的方式对载重情况进行预测,文章假定的传感器是理想线性的,这使得其在运动中测量载重具有局限性。文献[5]提出一种基于车辆后桥与马槽之间的位移变化来测量车辆载荷的方法,通过测量车辆后桥与马槽的变化,测量出车辆载荷信息,文中模型称重精度只有2%左右,允许偏载20%,只能供使用单位内部计量。文献[6]提到一种基于钢板弹簧与轴载之间的变化量来测量车辆载荷数据的方法,结合数据通过BP神经网络来训练网络模型,利用网络模型预测车辆载荷数据。文献[7]提出了基于电容传感器的车载动态称重系统的设计,利用电容传感器来替换位移传感器实现对载重的测量。文献[6-7]仍是基于钢架弹簧的位移量对车辆载重进行测量,这种测量方式在车辆运行中易受到运动加速度的影响,使得载重值会起伏,无法确定实时的车辆载重精确情况。文献[8]提出一种基于压电薄膜的车辆称重算法,虽然测量精度得到了较大的提升,但是系统设计与算法处理较为复杂,且并不利于实际场景下的普及使用。
纵观国内外研究现状,虽然已经涌现出丰富的测量系统及检测算法,但是这些系统都存在着测量精度不能满足当前车载称重系统的发展需求,且实际应用场景有限的问题。同时随着第五代移动通信技术(The 5th Generation Mobile Communication Technology,5G)兴起,给物联网带来新的机遇与挑战,需要所研发的系统不仅仅是一个单体应用架构,可能涉及到若干个功能模块的组合,往往是硬件系统与软件后台系统并存的、更加智能化、人性化的系统。
因此,本文设计出了一款精度更高、安装简便、基于多传感器信息融合的货车载荷实时监测系统。通过多传感器对车辆的载荷和运行数据进行采集,利用无线通信技术和云端服务器将数据集中处理,并设计了一套前后端体系,能进行测量数据的大规模存储,和车辆的载荷情况进行实时监控输出。有着硬件设备安装便捷,测量结果准确度高,实时性突出等特点。
1 系统方案
基于物联网技术的货车载荷实时监测系统主要分为硬件电路和软件算法两部分,其中硬件电路主要包括数据采集端、信号滤波、放大电路、A/D转换、控制器、数据显示、无线通信以及辅助电路等部分,软件算法主要包括下位机滤波算法和上位机拟合算法。下位机滤波算法处理采集到的载荷信息,减小干扰,提高准确度;上位机拟合算法整合载荷信息为真实载重物重量。系统总体实现框图如图1所示。系统采用的电阻式应变片传感器为BHF高精密级导体应变片;信号放大电路采用INA333芯片;滤波处理采用无源低通滤波器,降低高频信号的干扰;A/D转换模块以ADS1100为转换芯片,系统以STM32F105RCT6为MCU,与A/D转换模块通过I2C进行通信;MCU与无线通信模块通过串口进行通信,并通过串口发送“AT”指令与云服务器进行交互实现数据传输;
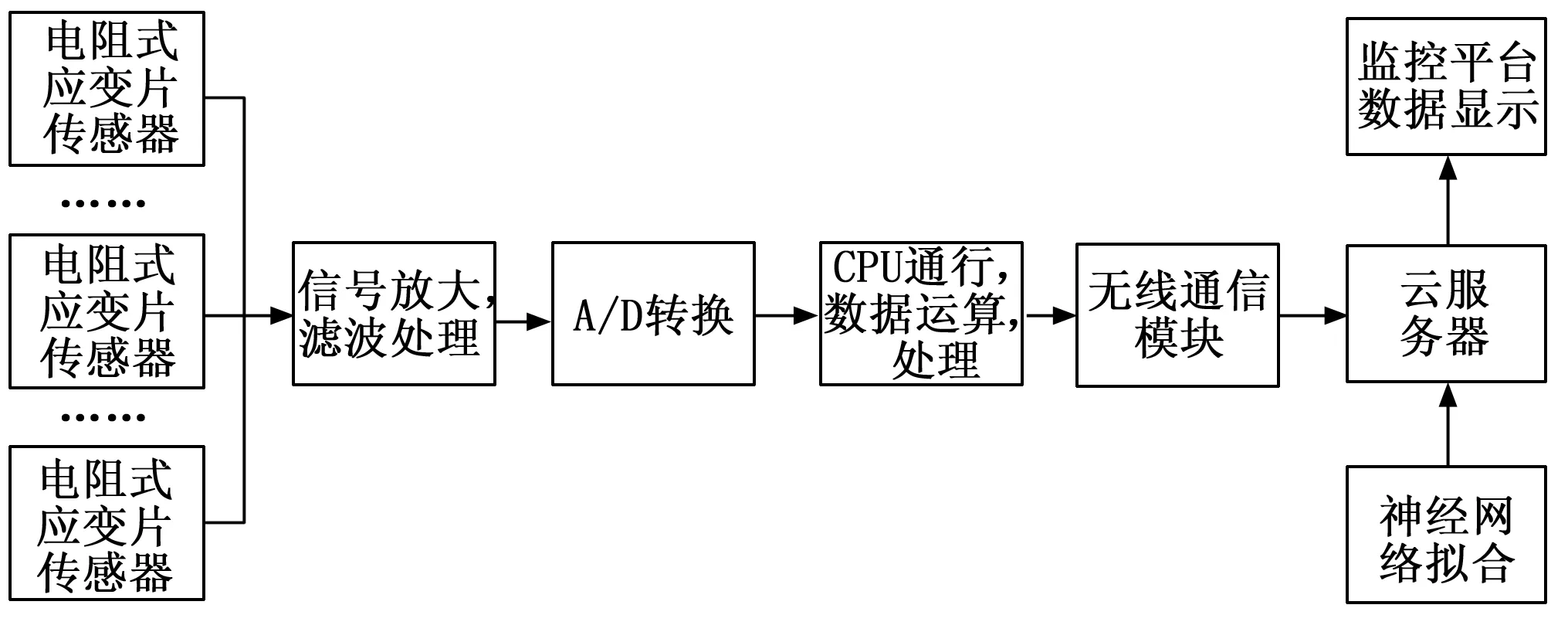
图1 货车载荷实时监测系统设计方案框图
图1中,电阻式应变片传感器安装于货车底部横桥承重点处,每辆货车每个车轴对称安装两个电阻式应变片传感器,用于采集货车载重引起的横桥形变信号;所采集到的十分微小的信号通过信号放大电路进行放大,并进行滤波处理,以降低高频信号的干扰;放大处理后的信号经过A/D转换由模拟量转化为数字量,进入MCU进行数据运算和处理;MCU处理的信号通过显示单元进行显示,并且通过无线通信模块发往云服务器;云服务器端采用神经网络方式处理由无线通信模块发来的载重信号,最终拟合出真实载重量并显示。
2 硬件电路设计
数据采集是硬件设计的核心,本设计为基于多传感器信息融合的车载称重测量,研究对象为车轴形变量与货车载重之间的关系。对于多轴运输车而言,其主要承重组件由车架、车轴、车悬架、车轮等部分组成车体通过车悬架系统连接于车轴,重物装载于车体上时,压力会通过悬架作用于车轴上,致使车轴产生形变量,随着装载量逐渐增加,形变量也会逐渐增大,为了提高车载称重系统测量数据的准确度,首先应该从采集到的形变量进行分析,故准确获取车辆运动过程中真实载荷引起的形变信息最为关键。而在车辆运动的过程中,货车会受到外界多种因素的影响,造成测量数据出现较大偏差,那么就需要消除或减小干扰因素对测量结果的影响。本系统通过设计数据采集模块,信号预处理模块,微控制器模块,串口调试模块,电源电路模块获取车辆载荷信息;设计无线通信模块发送载荷信息和位置信息于云服务器端进行进一步处理。
2.1 数据采集模块
传感器的选型对于提高测量结果精确度起着关键作用,本设计采用电阻式应变片[9-10]传感器对车轴形变信号进行采集。本文中采用的是BHF高精密级金属导体应变片,这种应变片具有高精度、全密封、温度自补偿、使用寿命长等特点。同时又由于电阻式应变片粘贴于车轴之上,车轴的微小形变量会造成应变片电阻变化量也很微弱,为了将电阻式应变式传感器的电阻变化准确地测量出来,在实际的应用中一般选择电桥电路测量其电阻变化,并且以电压信号的形式输出,也便于测试人员进行测试。电桥电路不仅结构简单稳定,还具有以下优点:灵敏度高、测量范围宽、线性度好,且易实现温度补偿等。能较好地适应于各种真实环境,同时也能满足各种测量要求,基于上述特点电桥电路在本系统中得到应用。
电桥电路按其结构连接方式可以分为3种类型:单臂电路、双臂电路以及全桥电路。单臂工作输出信号最小、线性、稳定性较差;双臂输出电压是单臂的两倍,性能比单臂有所改善;全桥结构的输出电压是单臂时的四倍,性能最好。因此,为了能够得到较大的输出电压信号,在本文中采用全桥电路结构。基本电路如图2所示。

图2 桥式电路图
在单臂结构中,设输出端(即VIN+、-两端电压)为uoutput,电源电压为U0,则有
(1)
(2)
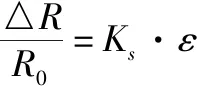
通过单臂结构输出电压如式,可以推知,在全桥电路中输出电压为:
uoutput=Ks·ε·U0
(3)
式(2)~(3)中Ks表示应变片灵敏系数,ε表示应变量。通过对原理的分析得知,采用全桥结构可以放大微小的形变信号,从而降低传感器数据采集时微弱信号所带来的误差对实验结果的影响。
2.2 信号预处理模块
2.2.1 信号滤波与放大
车辆在行驶过程中,测量信号会存在各种不稳定因素的干扰。虽然应变片采用全桥电路结构,但其输出的差模电压也仅是毫伏级别的信号,因此需要滤波和放大处理。如图3所示,滤波电路采用的是无源低通滤波[11],主要功能是消除高频噪声对测量信号的干扰。放大电路采用INA333,它是一个自归零的精密放大器,具有温度漂移低、共模抑制比高、低线性误差、高阻抗的特点,同时通过调节引脚RG相连的电阻R62阻值,可以控制放大增益,也可以通过REF引脚提供直流偏置。

图3 信号滤波与放大电路图
电压信号由VIN+、VIN-仪表放大器输入,再由仪表放大器放大后通过VOUT引脚输出,作为后续A/D转换器的输入信号。
2.2.2 A/D转换电路
经过INA333放大后的信号仍属于单片机不能识别的模拟信号,需要转换为数字信号,即A/D转换。为了避免提高测量结果的精确度,在本文中采用ADS1100转化器将放大后的电压作为输入,A/D转换后将数字信号通过I2C通道发送至MCU主控模块,如图4所示。

图4 A/D转换电路图
ADS1100芯片是美国TI(Texas Instruments)公司生产的全差分输入、高达16位分辨率、拥有自校准功能的A/D转换器,该芯片的自校准系统对于用户是透明的,同时片内拥有可编程的增益放大器PGA可提供1、2、4、8这4种增益选择[12-13],其内部结构如图4所示。ADS1100具有如下优点采用∑-Δ型A/D转换器,具有良好的抗干扰能力;有连续自校准功能,单周期转换,内部带有系统时钟; A/D转换时间20 μs,比内嵌型A/D转换器要快10~15倍。故其适合应用于本设计之中。ADS1100输出值公式为式(4),其中表示ADS1100的最小编码,K表示ADS1100的增益。
(4)
2.3 微控制器模块
本设计中微处理器采用STM32F105RCT6芯片。这款芯片是基于ARM®Cortex-M3TM内核的32位微控制器,最大支持72 MHz晶振作为外部低速时钟源。该芯片工作电压范围为2.0~3.6 V。在通信接口上,该芯片支持UART、I2C、SPI等通信方式,拥有5个USART串口、多达3个高速SPI接口(18 M位/秒)、2个I2C接口、双通道的CAN接口、USB2.0全速设备/主机/OTG控制器。芯片原理如图5所示, 该控制器功能强大、 价格低廉、 性能稳定、外设资源丰富,非常适合此款电力仪表的设计条件。在本设计中,由于有多组传感器采集模块,因此重映射了多组I2C接口供外部数据采集模块的使用。

图5 STM32F105RCT6芯片图
2.4 串口调试模块
本设计使用RS485串口用于和上位机通信以及连接车载显示。RS485通信可以实现标准设计,平衡发送和差分接收,有强大的抑制共模干扰能力。在发送端将串行口的TTL电平信号转换成差分信号,由A、B两线输出,经过双绞线传输到接收端后,再将差分信号还原成TTL电平信号[14-15]。如图6所示,采用MAX13485芯片作为串口芯片,连接微控制器和其他外设或者上位机,设计中采用了4 Pin接线端子引出,可以方便外设或者上位机接入。

图6 串口电路图
2.5 电源电路模块
本文采用车载24 V电源。一般而言,系统中元器件正常工作的电压范围在3.0~5.5 V之间,所以还需要对电压进行转换。如图7(a)所示,采用五端稳压器LM2596S-5芯片实现5 V电压电源的输出。同时,由于单片机以及其他功能模块芯片工作电压为3.3 V,所以还需要将5 V电压降压为3.3 V输出。如图7(b)所示,AMS1117芯片可以将输入的5 V电压进行微调,使误差在±1.5%的范围内,同时使电流也得到调整,从而减少因稳压器及电源电路过载带来的压力[16]。为了避免STC32F105RCT6单片机VDDA引脚悬空,通过0 Ω电阻将3.3 V转化为模拟3.3 V电压源,0 Ω电阻电路相当于很窄的电流通路,能够有效地限制环路电流,使噪声得到抑制。
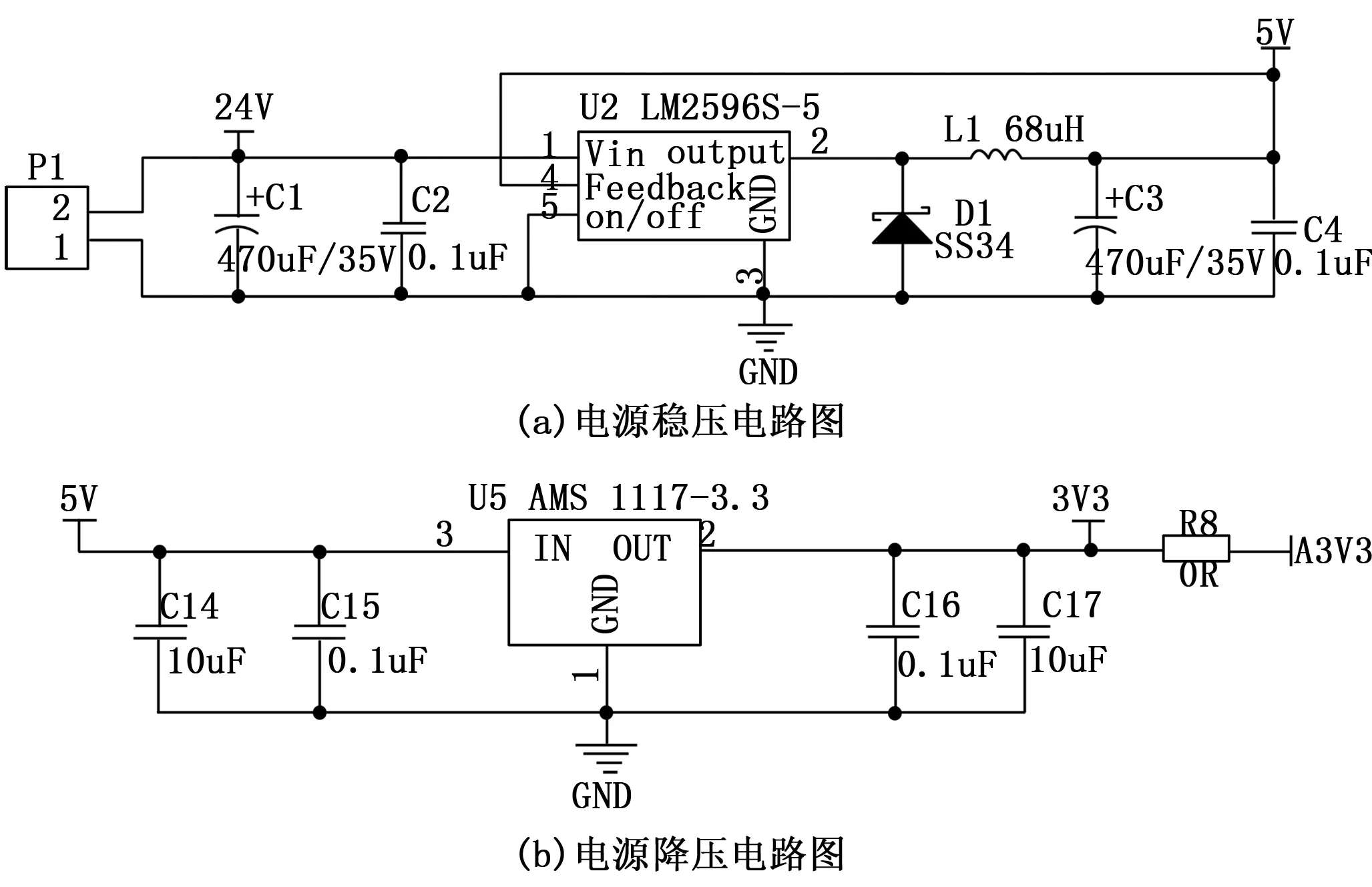
图7 电源电路图
2.6 无线通信模块
移动的车辆数据需要通过无线的方式传输至云端服务器[17]。本设计中,采用了EC200S-CN芯片,它是移远通信最近推出的 LTE Cat 1 无线通信模块。支持最大下行速率 10 Mbps 和最大上行速率 5 Mbps,具有超高的性价比;同时在封装上兼容移远通信多网络制式 LTE Standard EC2x(EC25、EC21、EC20 R2.1)、EC200T/EG25-G/EG21-G模块以及 UMTS/HSPA+ UC200T 模块,实现了 3G 网络与 4G 网络之间的无缝切换。EC200S-CN 还支持标准的 MiniPCIe 封装,以满足不同行业产品应用需求,是物联网应用领域的合适选择。无线通信模块是车辆联网的关键部分,将数据上传至服务器是目前物联网技术的发展趋势。本设计中EC200S-CN模块与微控制器之间通过串口进行数据交互,EC200S-CN的发送和接收管脚连接到微控制器的串口对应的管脚进行串口通信。EC200S-CN的电路原理图如图8所示。

图8 EC200S-CN模块原理图
EC200S-CN模块与阿里云服务器进行连接,进而将经过融合处理后的传感器数据传送至云平台。它们之间的连接协议为MQTT协议(微消息队列协议),该协议是面向移动端场景下,特别适用于车联网移动设备,如车载终端等,具有单设备数据量少可以快速处理的特点。待硬件设备连上阿里云服务器后,可以开通相应的IoT物联网平台,最后通过少量的配置即可定时接收到设备上报的数据信息。在本设计中采用阿里云IoT平台,开发者只需做少量配置即可在数据库中获取底层硬件设备上报的数据,提高开发者的开发效率。
EC200S-CN模块通过使用AT指令采用MQTT协议对接阿里云loT云平台的步骤如下:
1)使用AT+CREG指令检查网络注册状态;
2)使用AT+QMTCFG指令完成MQTT参数设置;
3)使用AT+QMTOPEN指令完成通过MQTT与阿里云的连接;
4)使用AT+QMTSUB指令完成topic订阅,可以通过订阅的topic上传数据到云端;
5) 使用AT+QMTPUBEX指令发送数据到阿里云loT平台。
3 软件算法设计
软件算法设计是车载称重系统功能实现的核心[18]。车载称重系统在测量过程中容易受到车辆自身或者外界因素的干扰,这些因素都会对最终的测量结果产生一定的影响。故选用合适的车载称重系统算法,提高系统测量精度必不可少。本文研究的车载称重系统软件算法主要包括两个部分:下位机滤波算法和上位机拟合算法。
3.1 下位机滤波算法
本设计综合考虑了车辆在不同情况下具有随机冲击脉冲、周期性噪声干扰等场景,在软件算法中对A/D转换后的数据采用限幅平均滤波进行降噪处理[19]。算法流程如图9所示。
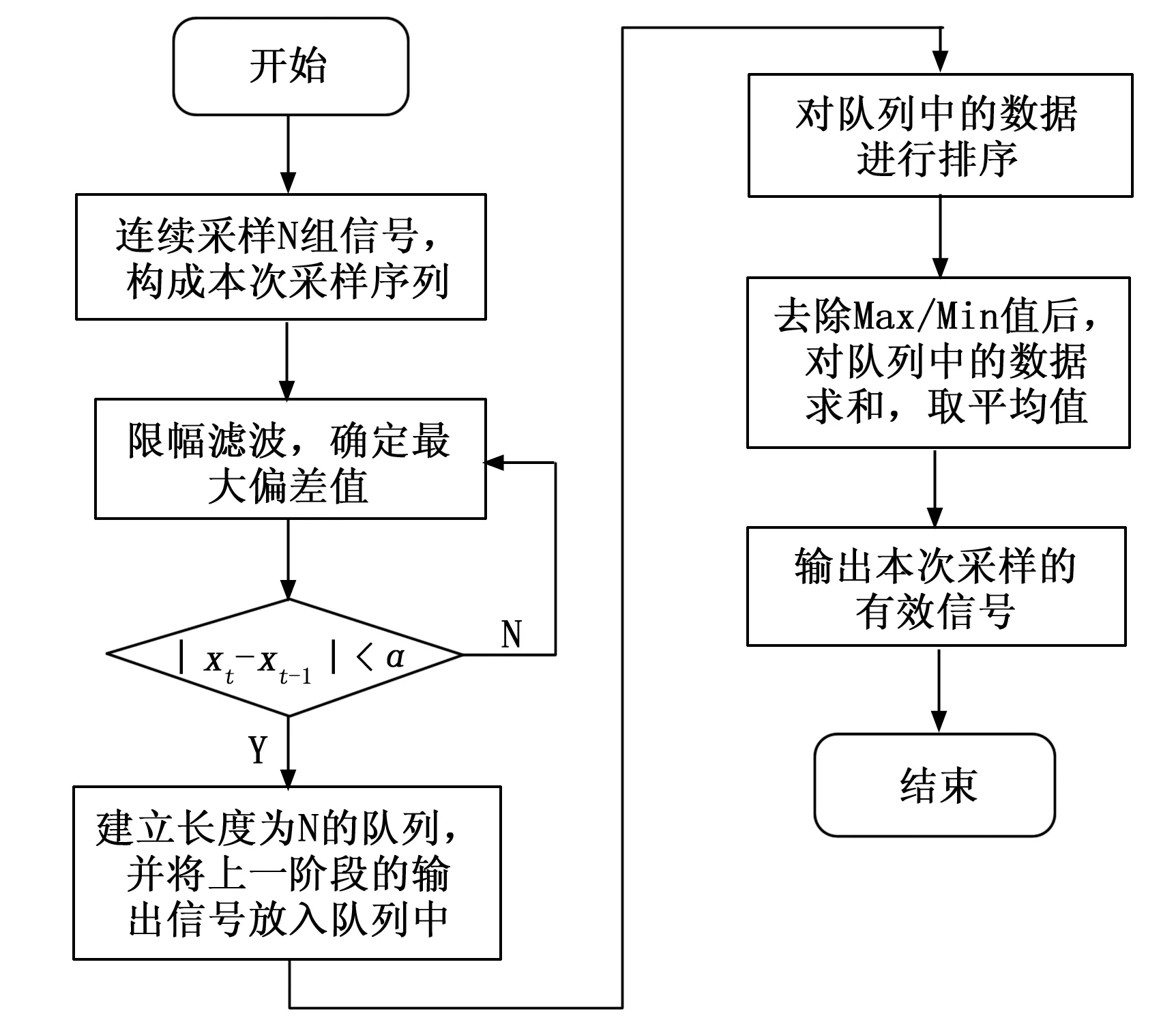
图9 限幅平均滤波算法流程图
首先对采样的信号进行限幅处理,即确定两次采样允许的最大偏差值(记为α),每次检测到的最新值与上一次的值之间的差值只有在α以下,才会作为有效值使用。再将处理后的数据送入队列中,N组采样数据看作一个队列,长度固定为N,每进行一次采样,就将最新的采样数据放置队尾,去掉队首的数据,使队列中始终保持N个最新数据[20-21],再去掉队列中的最小、最大的元素,然后对剩下的元素进行取和求平均值,输出结果为本次采样的有效信号。此过程于微控制器端进行,采用MDK keil5为开发环境,将处理后的数据供云端服务器进行拟合。
3.2 上位机拟合算法

RBF神经网络基本思想为:利用径向基函数作为隐藏层神经元的基,从而构成隐藏层空间,再将输入层的数据映射到高维空间中,从而使得低维空间内的线性不可分问题在高维空间中线性可分。本设计中采用了广义RBF神经网络,它只要求隐藏层神经元数大于输入层的,而不需要等于输入样本数,在实际中隐藏层节点的数量要远小于样本数量。广义RBF神经网络设计主要包括:1)结构设计,确定隐藏层中最合适的节点数量k;2)参数设计。网络中径向基函数的数据中心以及扩展常数αi、隐藏层到输出层上的权值ωij。
RBF神经网络具有三层结构的神经网络,包括输入层(Input Layer)、隐藏层(Hidden Layer)和输出层(Output Layer),网络模型结构图如图10所示。

图10 RBF神经网络模型结构图
由于传感器初始状态不同,为了减少非测量因素对网络输出的影响,需要对输入数据进行归一化处理,方法如下:
(5)
式(1)中xj表示归一化后的结果;xi为输入样本原始值;xmax、xmin分别表示输入样本中的最大值和最小值。
输出结果的反归一化处理方法如下:
yi=yj*(ymax-ymin)+ymin
(6)
其中:yj表示网络实际输出值;yi为反归一化后车辆载荷输出值;ymax、ymin分别表示网络输出结果中的最大值和最小值。
RBF模型的训练使用MATLAB中的神经网络工具包,具体步骤如下:
1)初始化网络。选择premnmx作为输入归一化函数,将输入中不同量纲的数据归一化到[-1,1]范围内,消除输入样本中不同数量级的数据给预测结果造成的较大偏差。
2)确定网络训练数据以及测试数据。在样本数据中选择80%的数据作为训练样本,其余20%做测试样本。
3)创建RBF神经网络模型。通过newrb函数新建一个RBF神经网络,并指定网络参数。
4)使用train函数对RBF神经网络进行训练,再利用sim函数对网络进行仿真,最后保存训练后的网络参数。
4 实验测试结果与分析
4.1 实验环境
采用车辆模型进行实验,参数如表1所示。本次实验中传感器安装位置如图11所示,整车共装有6枚电阻式应变片传感器,分别安装于除去驾驶室下方的车轴以外的其它三根车轴上,且每根车轴对称位置上进行安装。

表1 车辆模型参数表
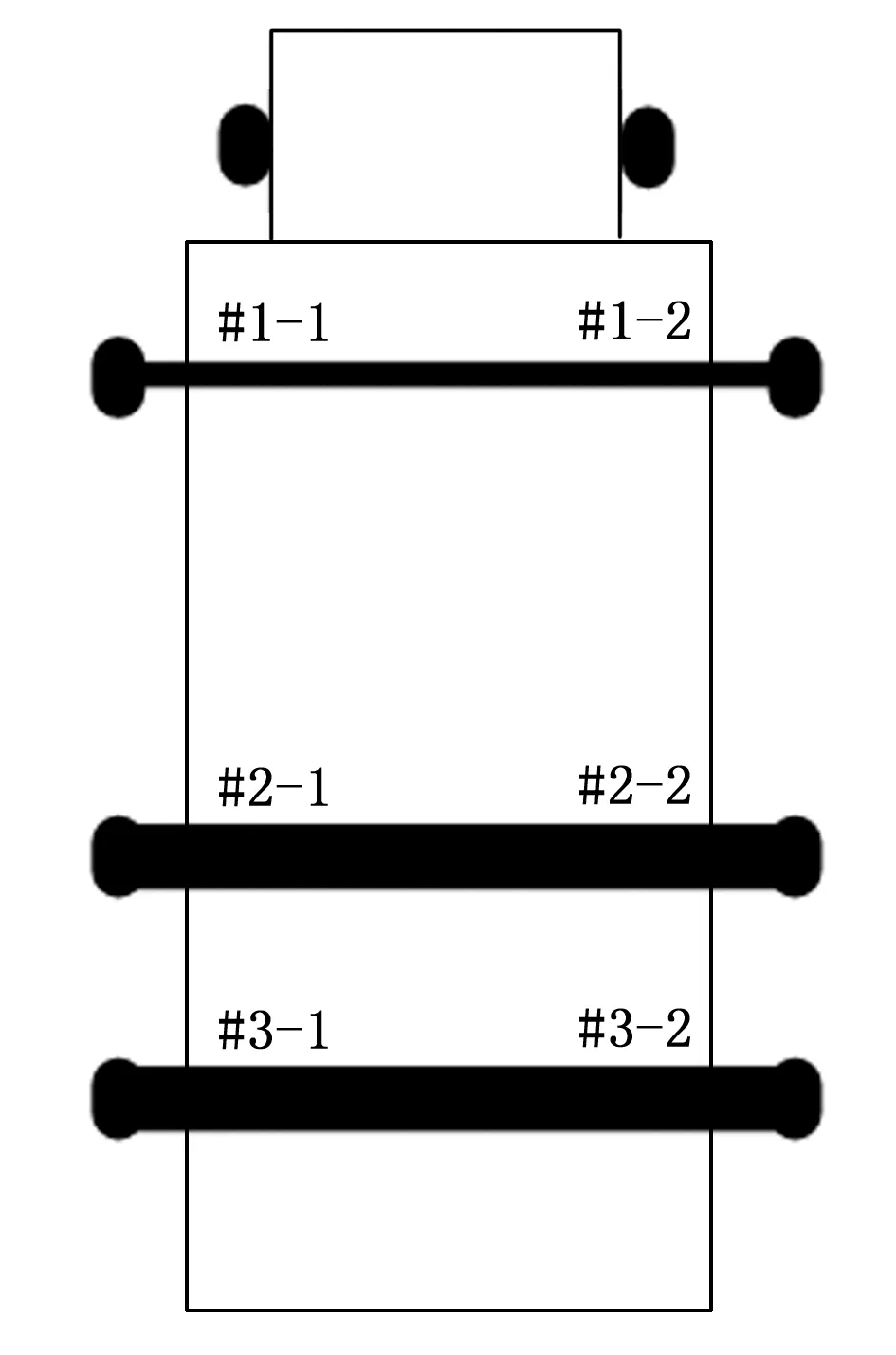
图11 传感器安装位置示意图
实验之前安装调试好实验设备后,选取了一段平整度适中的普通路面进行测试,实验过程中选用标准1 t重的标准砝码若干,通过加减砝码来模拟货车不同载重。整个实验分为两个阶段:递增砝码和递减砝码两个阶段。递增阶段,每次以1吨为单位进行累加,待装载砝码后让车辆数据稳定,记录稳定后的数据作为车辆装载值。递减阶段,每次从车厢中取下1个单位的砝码,测试流程与递增阶段相同,整个过程中共采集1 260组实验数据。把数据分成两部分,80%作为神经网络样本数据进行训练,20%用来检验网络的性能。
4.2 实验结果分析
通过样本数据进行神经网络训练,得出最优的网络模型[25],将余下数据输入训练好的模型中,把预测结果与实际值进行对比,结果如表2。σ预测表示基于RBF神经网络预测值的相对误差,由式(3)表示,
(7)

表2 RBF神经网络预测值与实际值对比
实验结果表明,经过RBF神经网络训练后货车载荷预测结果最大相对误差为2.75%,均值误差为1.30%,预测结果基本趋近于真实载重量,完全符合系统期望精度,也满足ASTM-E1318[26]中对于轴载荷的IV级标准。在实际过程中,影响测量车辆载荷的因素有很多,RBF神经网络算法可以对影响车辆载荷测量结果的因素进行补偿,使网络预测值更趋近于真实值。由此可以表明此算法在车载称重系统数据处理中的有效性与可行性,可以很大程度地提高本文所研究的车载称重系统测量精度。
5 结束语
本文设计了一种基于物联网技术的多传感器信息融合的货车载荷实时监测系统,并提出一种可靠的车辆载荷测量方法。本设计具有对行驶车辆的载荷、所处的位置进行实时监测的功能。根据试验结果分析载荷监测值精度完全满足ASTM-E1318中车载称重IV级标准,可替代传统的固定式称重方式,弥补固定式称重的弊端,大大降低系统成本,节省环境资源。同时实时监测,实时定位,实时传输数据也便于车辆管理者对于出现的异常情况进行及时的管控。此方案采用模块化设计,便于日后升级改造,在此基础上搭建车辆载荷监控云平台,实现数据可视化,有效地进行载荷分析,工作管理,运行状况监测。本设计方便快捷,对车辆载运的监管有极高的使用价值,在工业物联网迅猛发展的前景下具有广泛的应用。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
中国教育信息化·高教职教(2022年4期)2022-05-13
初中生学习指导·中考版(2022年4期)2022-05-12
电子乐园·上旬刊(2022年5期)2022-04-09
煤气与热力(2022年2期)2022-03-09
舰船科学技术(2021年12期)2021-03-29
舰船科学技术(2021年12期)2021-03-29
高考·中(2020年2期)2020-09-10
科学与技术(2018年5期)2018-11-15
理科考试研究·初中(2017年4期)2017-11-04