矫形鞋垫对扁平足患者行走支撑期下肢运动功能的影响
2022-08-01 00:28:32白啸天霍洪峰赵虎徐硕
中国运动医学杂志 2022年5期
白啸天 霍洪峰 赵虎 徐硕
1 河北师范大学体育学院(石家庄 050024)
2 河北省人体运动生物信息测评重点实验室(石家庄 050024)
足是人体重要的运动器官,健康的足可以帮助人体在运动中完成缓冲、承重和推进的功能[1,2]。扁平足是常见的足部畸形,其明显特征为内侧纵弓下降、跟骨外翻等[3]。作为足重要的功能结构,足弓的下降不仅使足底血管、神经受到压迫,长期负重产生不适甚至疼痛,还会影响人体运动过程中足部的弹性缓冲作用和刚性杠杆作用,降低运动功能[4]。有研究表明,随着年龄的增长,足底肌肉和筋膜的老化会加大扁平足的发生率[5],而不健康的运动方式和鞋靴选取不当也会增加足部畸形的风险。对足部的调查发现,人们对扁平足的关注度逐渐提高[6,7],足部健康开始上升为社会性问题,便捷有效的扁平足矫正方法亟需探索和研究。
在鞋内加入矫形鞋垫是纠正异常足姿和步态常用的矫正方法,具有便捷、无创伤的特点[8,9]。矫形鞋垫可针对不同患者的足型进行定制,通过包裹后跟、支撑足弓等结构,辅助足部功能,保护足部运动时因地面反作用力产生的过度内翻或外翻[10]。研究表明,矫形鞋垫对足底筋膜炎[11]、偏瘫[12]、糖尿病足[13,14]和膝关节骨性关节炎[15,16]等疾病患者行走时足部舒适感、平衡能力及足功能都有着较好的治疗效果。虽然已有研究证实矫形鞋垫有利于改善扁平足患者足底压力分布[17],但矫形鞋垫对扁平足患者行走支撑期各阶段下肢运动功能的影响仍不够深入,其对下肢各部位的运动功能影响仍需详细划分。本研究通过3D雕刻打印技术,对扁平足患者鞋垫进行个性化定制,采用生物力学手段对比正常足、扁平足和加入矫形鞋垫干预的扁平足行走支撑期各阶段髋、膝、踝、足的运动特征,探究矫形鞋垫对扁平足患者行走支撑期下肢运动功能的影响,为采用矫形鞋垫对扁平足进行治疗提供理论参考。
1 研究方法
1.1 受试者
选取24 名青年男性受试者,身高175.43 ± 4.42 cm,年龄24.74 ± 2.86 岁,体重66.24 ± 3.45 kg,无行动能力障碍且近3个月无下肢损伤。采用三维足型扫描仪,根据足印法区分足型[18-20](3D PODOMED,北京海德美业科技有限公司,测量精度± 1.0 mm),其中正常足组12 名(足弓指数介于0.21~0.26[20]),扁平足组12名(足弓指数大于0.30[20])。
1.2 矫形鞋垫定制
扁平足组赤足在高频足底压力板(RSscan International公司,比利时,采集频率120 Hz,传感器密度4个/cm2)上按自身最适步速行走。整理已采集的三维足型数据及行走时足底压力分布数据,在矫形鞋垫CAD/CAM 数控铣床(意大利,Sensor Medica 公司)中制作鞋垫,采用全吸尘砂轮机(温州市瓯海迪达机械厂)打磨。本研究所用的矫形鞋垫为双密度乙烯醋酸乙烯酯(EVA)定制型鞋垫,其中足跟杯、内外侧纵弓部位材料邵氏硬度为60°,其余部位邵氏硬度为40°。矫形鞋垫成品见图1。

图1 双密度EVA矫形鞋垫
1.3 实验流程
1.3.1 下肢模型建立
参考以往研究构建符合本实验要求的下肢模型[21-23],将荧光标记点置于受试者肩峰、股骨大转子、股骨内上髁、股骨外上髁、内踝尖、外踝尖、足跟骨及第5跖骨头处,左右两侧共16 个标记点建立下肢模型。以肩峰、股骨大转子、股骨外上髁连线的夹角为髋关节角度;股骨大转子、股骨外上髁、外踝尖连线的夹角为膝关节角度;股骨外上髁、外踝尖及第5跖骨头连线夹角为踝关节角度进行运动学数据采集(图2)。

图2 下肢模型建立
1.3.2 数据采集
两组受试者分别穿着极简鞋以最适步速在Motion动作捕捉系统(美国,Motion 公司,摄像机数8 个,像素2352×1728,同步频率120Hz)最佳视域及足底压力板上行走;其中扁平足组分别以加入矫形鞋垫和无干预两种方式行走,同步采集受试者足底压力数据及运动学数据,纳入每名受试者步速差值不超过0.2 m/s优势侧下肢的三次数据,取平均值进一步分析。
1.4 指标测量
1.4.1 支撑期各阶段时间
以足底压力测试系统中后跟触地时刻、前掌触地时刻、后跟离地时刻及全足离地时刻将行走支撑期分为着地阶段、承重阶段及离地阶段[1,24,25],各阶段时间按每次测试支撑期总时间百分比进行归一化处理。
1.4.2 足部功能评测
以x 轴为支撑期时长百分比(0~100%)、y 轴为足宽百分比建立坐标系(-50%~+50%,负值表示足外侧、正值表示足内侧),绘制压力中心轨迹曲线图[20,26]。以压力中心轨迹在着地阶段、承重阶段的受力偏移及离地阶段的水平偏移变化率评价后足、中足、前足的功能[20,26]。受力偏移为足底压力中心轨迹在着地和承重阶段水平方向最大偏移距离,用于反映足的稳定能力;水平偏移变化率为离地阶段曲线的平均斜率,用于反映负荷转移能力,评价蹬伸功能[27]。
1.4.3 下肢关节活动能力评测
观察踝关节、膝关节和髋关节在行走支撑期不同阶段的角度变化特征,以此评价不同足型之间及加入鞋垫前后的下肢活动能力,根据踝、膝、髋关节角度曲线计算下肢各关节角度在着地、承重和离地3 个阶段的角度变化范围,角度变化范围为各关节在行走支撑期对应阶段最大角度与最小角度的差值。
1.5 统计学方法
足型及足底压力数据在PodMed及Footscan自带软件中采集分析,动作捕捉数据在Cortex 软件进行处理,曲线绘制及计算在Origin2018 中进行。实验数据在spss25.0 中统计,以平均值±标准差表示。正态分布检验采用Shapiro-Wilk 法,数据符合正态分布时,组内采用配对样本t检验,组间采用独立样本t检验;当数据不符合正态分布时,采用非参数检验,组内进行Wilcoxon符号秩检验,组间进行Mann-Whitney U 检验。P<0.05为具有统计学意义。
2 结果
2.1 支撑期各阶段时间比较
表1显示,在着地阶段,扁平足组相对时长低于正常足组(P=0.026);加入矫形鞋垫后,扁平足组着地阶段相对时长增加,与干预前相比差异具有统计学意义(P=0.007);加入矫形鞋垫后扁平足行走支撑期着地阶段时长与正常足相比差异无统计学意义(P>0.05)。

表1 各组支撑期各阶段时间比较(n=24,%)
在承重阶段,正常足、扁平足组和加入矫形鞋垫的扁平足组穿极简鞋行走相对时长差异不具有统计学意义(P>0.05)。
在离地阶段,扁平足组相对时长显著高于正常足组(P=0.022),加入矫形鞋垫干预后扁平足组离地阶段相对时长与正常足组和扁平足组差异无统计学意义(P>0.05)。
2.2 支撑期各阶段足部功能比较
支撑期各阶段足底压力中心轨迹如图3。在着地阶段,压力中心轨迹先向内侧偏移,随后向外侧过渡;在承重阶段,压力中心轨迹逐渐向足外侧转移;在离地阶段,压力中心轨迹向内侧转移,且水平偏移变化率较大。
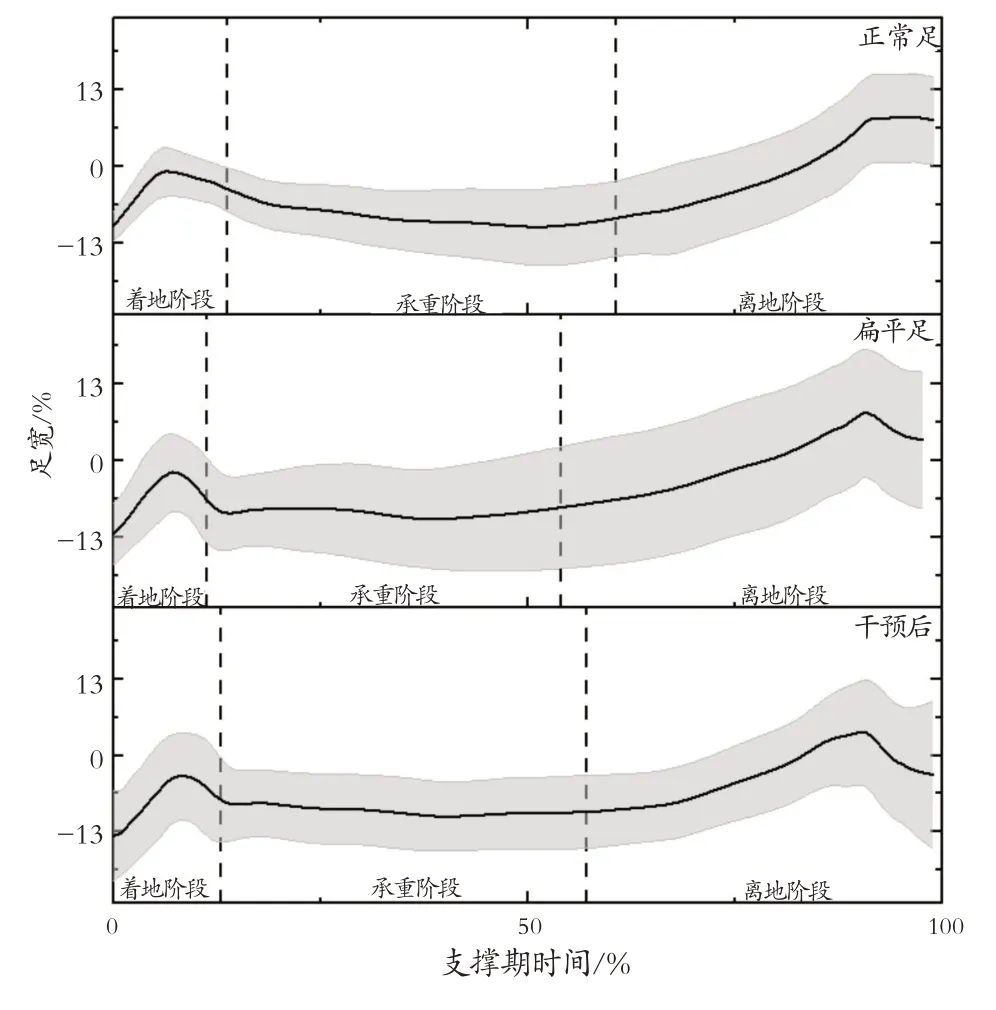
图3 足底压力中心轨迹
如表2 所示,在着地阶段,正常足、扁平足组和加入矫形鞋垫的扁平足组后足受力偏移差异不具有统计学意义(P>0.05);在承重阶段,加入矫形鞋垫的扁平足组行走支撑期中足受力偏移低于正常足和扁平足组(P=0.007,P=0.049);在离地阶段,加入矫形鞋垫干预前后扁平足组的压力中心水平偏移变化率均小于正常足(P=0.046,P=0.012)。

表2 各组受力偏移与水平偏移变化率比较(n=24)
2.3 支撑期各阶段下肢关节活动能力比较
2.3.1 踝关节支撑期角度变化
踝关节角度变化曲线如图4。在着地阶段,踝关节角度增加,以该阶段踝关节增加角度评价其缓冲功能;在承重阶段,踝关节角度降低,以踝关节角度变化幅度评价其过渡功能;在离地阶段,踝关节角度增加,以该阶段踝关节角度最大值与最小值差评价其蹬伸功能。

图4 踝关节角度变化曲线
由表3可知,正常足、扁平足组及加入矫形鞋垫干预后的扁平足组踝关节角度变化在行走支撑期着地阶段、承重阶段和离地阶段差异均无统计学意义(P>0.05)。

表3 各组踝关节各阶段角度变化比较(n=24,度)
2.3.2 膝关节支撑期角度变化
膝关节角度变化如图5。着地阶段膝关节角度逐渐减小;在承重阶段,膝关节角度逐渐增大;后跟离地后,膝关节角度减小。

图5 膝关节角度变化
由表4可知,在着地阶段和承重阶段,膝关节角度变化各组差异均无统计学意义(P>0.05);在离地阶段,扁平足组膝关节角度减小幅度高于正常足组(P=0.007),加入矫形鞋垫后,扁平足组膝关节变化角度大于未矫正的扁平足组及正常足组(P=0.047,P=0.000)。

表4 各组膝关节各阶段角度变化比较(n=24,度)
2.3.3 髋关节支撑期角度变化比较
髋关节变化曲线如图6。在着地阶段和承重阶段,髋关节角度增加,以其增加角度评价髋关节伸展性;在离地阶段,髋关节角度先减小后增加,以最大角度变化范围评价其活动度。

图6 髋关节角度变化
由表5可知,在着地阶段,各组髋关节角度变化差异均无统计学意义(P>0.05);在承重阶段,扁平足加入矫形鞋垫前后髋关节角度变化均大于正常足(P=0.048,P=0.011),扁平足组干预前后差异无统计学意义(P>0.05);在离地阶段,正常足组与扁平足组髋关节角度变化差异不具有统计学意义(P>0.05),加入矫形鞋垫后扁平足组髋关节角度变化低于扁平足组和正常足组(P=0.001,P=0.002)。

表5 各组髋关节各阶段角度变化比较(n=24,度)
3 讨论
3.1 矫形鞋垫对足部控制能力的影响
人体足部在自然站立情况下,主要通过足跟、第1和第5 跖骨部位进行三点支撑[9,28],而对于扁平足患者,内侧纵弓的下降通常伴随足外翻,改变人体正常的力线,使其无法完成合理的三点支撑,增加损伤风险[3]。以往研究发现,对于扁平足患者,行走时后足和足弓部位的压强和冲量都显著高于正常足[25],矫形鞋垫可根据患者足底压力分布特点,通过改变鞋内底形状结构及材料特性,增强足跟包裹性和缓冲性,支撑足弓,增加人体运动时足部的舒适感和控制能力[9,10]。
足底压力中心轨迹是足底受力特征的重要指标,通过压力中心轨迹曲线特征和各阶段时长可评价足底受力偏移、水平偏移变化率,进而反映足部控制能力和蹬伸能力等动态足功能[20,29,30]。在着地阶段,足通过足跟部位完成缓冲,以足跟轴向前滚动[2]。本研究结果显示,扁平足患者缓冲阶段相对时长低于正常足(P<0.05),加入矫形鞋垫后,该阶段时长显著增加,且与正常足无显著差异。矫形鞋垫增加了后足缓冲时长,有利于足跟着地时缓冲地面冲击。在受力偏移上,并未发现三者存在明显差异,这表明不同足型在着地时水平方向控制能力相近,扁平足与正常足后足稳定性不存在差异。在承重阶段,人体以足为支撑,通过踝关节轴完成重心向前的过渡,足主要通过足弓的下降完成重心的转移[2,31]。本研究结果表明,该阶段加入矫形鞋垫干预前后和正常足三者相对时长不存在明显差异,加入矫形鞋垫后压力中心轨迹受力偏移显著低于不加鞋垫行走,这可能是矫形鞋垫支撑了足弓,减小了内侧纵弓降低幅度,辅助足部承重,进而提高了足弓在承重时的稳定性。在离地阶段,足通过前足和足趾的滚动完成蹬伸,足部逐渐离开地面,重心向对侧转移。本研究发现,扁平足离地阶段相对时长高于正常足(P<0.05),且扁平足蹬伸时压力中心轨迹水平偏移变化率低于正常足,这表明扁平足将负荷转移到对侧足的能力较差,蹬伸效率较低。研究表明,扁平足患者在楼梯行走时为控制关节的过度外旋增加了肌肉的激活程度[32],可推测扁平足患者正常行走下肢异常力线也可能需要肌肉额外做功,降低了蹬伸效率。加入矫形鞋垫后,扁平足组离地阶段压力中心轨迹水平偏移变化率并未提高,矫形鞋垫对蹬伸离地功能的促进作用不明显。可见加入矫形鞋垫有利于扁平足患者行走时后足的缓冲和足弓的稳定性,但对扁平足患者蹬伸能力提升不显著。
3.2 矫形鞋垫对下肢活动能力的影响
3.2.1 矫形鞋垫对踝关节的影响
在行走支撑期,踝关节主要通过背屈和跖屈完成足的缓冲、过渡和蹬伸功能,在着地阶段,踝关节由于地面反作用力产生小幅度的跖屈[31],用这一跖屈角度变化可评价踝关节在着地阶段的缓冲功能。本研究结果表明,踝关节跖屈角度变化在正常足与扁平足干预前后均无差异,均介于5°~6°之间,这与前人研究结果一致[31]。在承重阶段,踝关节角度逐渐减小,足背屈使小腿以踝关节轴向前滚动。在离地阶段,踝关节跖屈完成蹬伸[2,31],但测试结果均未发现组内和组间踝关节角度变化的差异,矫形鞋垫对踝关节活动能力影响较小。
3.2.2 矫形鞋垫对膝关节的影响
膝关节是保证合理的下肢力线进行动量传递的重要结构,膝关节在着地阶段进行小幅度的屈曲以缓冲中心的下降,对于该阶段膝关节的角度变化,扁平足组和正常足组以及扁平足组加入矫形鞋垫干预前后并未发现有显著差异。在承重阶段,膝关节逐渐伸展,保持下肢动量以足为支撑进行传递,完成重心向前的过渡;在离地阶段,足跟抬起,足与地面的接触面积减小,膝关节屈曲以降低身体重心维持平衡。本研究结果发现,正常足以及加入矫形鞋垫前后的扁平足在离地阶段膝关节屈曲角度均存在显著差异,其中正常足屈曲角度变化最小,加入矫形鞋垫干预后的扁平足膝关节屈曲变化最大。蹬伸时,足主要通过跖趾关节的伸展,通过足底筋膜的绞盘效应起到刚性杠杆作用,推动人体前进[1]。对扁平足患者跖趾关节活动度的研究发现,扁平足患者跖趾关节通常较为僵硬,活动受限[20,33],这使得跖趾关节无法有效伸展以完成足底绞盘效应,武明等[34]的研究通过增加鞋底硬度限制跖趾关节,发现膝关节和踝关节角度变化代偿性增加,相关研究也表明跖趾关节功能对运动表现有着重要影响[33,35]。离地蹬伸时加入矫形鞋垫的膝关节活动度大于无鞋垫干预,可能是跖趾关节受限所致,加入矫形鞋垫干预会使膝关节发生代偿活动。
3.2.3 矫形鞋垫对髋关节的影响
髋关节是下肢重要的灵活关节,在着地阶段和承重阶段,髋关节伸展以辅助下肢围绕足跟轴和踝关节轴滚动[2,31];在离地阶段,髋关节需缓冲对侧足着地进行屈曲,用于缓冲对侧足的地面反作用力,维持平衡,同时髋关节还需伸展以完成下肢的蹬伸[2,31]。本研究结果表明,在承重阶段,矫形鞋垫干预前后扁平足组髋关节伸展角度均大于正常足组,虽然矫形鞋垫支撑了扁平足的足弓,但足-鞋整体结构刚性仍然较高,不能充分完成正常足足弓下降承重的功能,这使得承重阶段身体负荷向前过渡时需要髋关节代偿,导致该阶段髋活动度增加。在离地阶段,扁平足与正常足髋关节活动范围无显著性差异,加入矫形鞋垫后,相比于无矫形鞋垫和正常足,髋关节在离地阶段的活动能力受限。
综合以上结果可知,在着地阶段,矫形鞋垫有助于增加扁平足患者的后足缓冲能力;在承重阶段,矫形鞋垫提高了足-鞋整体性,增加了足弓部位的控制能力,但对髋关节代偿的屈伸角度没有改善;在离地阶段,加入矫形鞋垫使得膝关节角度产生了代偿,但对扁平足患者蹬伸效率改善不明显。
4 结论
矫形鞋垫提高了足-鞋整体性,增强了扁平足患者行走支撑期后足缓冲和足部控制能力,但矫形鞋垫干预使膝关节和髋关节产生了代偿活动,不利于足部蹬伸;对扁平足的矫正要结合下肢功能的康复训练和矫形鞋垫等辅助器械。
猜你喜欢
南方农机(2022年7期)2023-01-04 03:02:13
汽车观察(2021年4期)2021-05-10 04:08:08
医学与法学(2020年6期)2021-01-21 04:05:06
体育科学(2018年4期)2018-05-03 12:17:46
物理教师(2017年6期)2017-06-27 03:23:48
中学物理·高中(2016年8期)2016-08-08 09:21:06
阅读(科学探秘)(2016年3期)2016-05-30 10:48:04
现代商贸工业(2016年34期)2016-03-13 05:58:07
焊接(2016年5期)2016-02-27 13:04:48
家庭医药(2016年1期)2016-01-20 20:19:26