高功率激光合束的指向控制分析及研究进展
2022-07-28 07:43陈建华刘小溪王学锋王军龙
导航与控制 2022年2期
陈建华,郑 也,刘小溪,张 琳,王学锋,2,王军龙
(1.北京航天控制仪器研究所,北京 100039;2.北京市光纤传感系统工程技术研究中心,北京 100094)
0 引言
近年来,高功率激光器在军事国防领域扮演了越来越重要的角色,军事强国一直致力于将高功率激光武器应用于海陆空天等加载平台[1-3]。与工业加工不同,国防应用对激光器的输出功率、光束质量、能量转换效率以及结构紧凑性和可靠性都有更为严苛的要求。一般而言,武器级的应用要求较高的输出功率,通常要达到100kW以上,同时还需要良好的光束质量以满足远距离毁伤要求。光纤激光器[4-5]具有效率高、光束质量高、结构紧凑、维护成本低、可靠性高等一系列优点,近年来得到广泛研究,其输出功率不断提升。然而,受限于泵浦源亮度、非线性效应、热效应等物理限制,单根光纤输出的单模激光功率存在极限,目前公开报道的单根单模光纤激光的最高输出功率仅为20kW,无法满足激光武器系统对光源功率的需求。
激光合束技术[6-10]能够将多路激光进行叠加,在提高输出功率的同时,保持了良好的光束质量,是突破单纤输出功率极限的有效技术途径,成为实现满足激光武器应用的激光光源的必然选择。目前,主流的合束技术分为非相干功率合成、相干合成和光谱合成。无论采用何种合成技术,都需要通过分立的光学元件将多路子光束的指向进行特定偏转,从而达到合束所需的子光束指向要求。但是在实际应用中,较长的空间光路传输路径、光学元件支撑结构对振动、温变等因素比较敏感,会影响光束指向的稳定性,进而造成合成激光器性能的下降。此外,当单路激光以数千瓦的高功率运转时,光学元件膜层及基底吸收等因素也会对光束指向产生影响,从而导致各路激光的光束指向发生偏转,影响合束效果。采用光束指向控制技术可以实时校正各个单元光束的指向偏差,消除环境因素对合束效果的影响,有效提高光束合成的效率和光束质量,为高功率激光合束系统的实际工程应用提供有力支撑。
本文对合束系统中的指向偏差对合束效果的影响进行了理论分析,得出满足实际应用需求的光束指向控制精度要求。对典型控制器件、控制算法、位置探测等核心单元进行了介绍及对比分析,同时介绍了基于不同控制器件的指向控制发展现状和最新研究进展,最后展望了激光合束的指向控制技术的发展方向。
1 光束指向控制方法
1.1 光束指向偏差对合束性能的影响
激光合束的目的是将多波长的激光合成一束,在保持良好光束质量的前提下实现更高的输出功率。以基于二向色镜的波长合束为例,选取三束不同波长的光束,如图1所示。
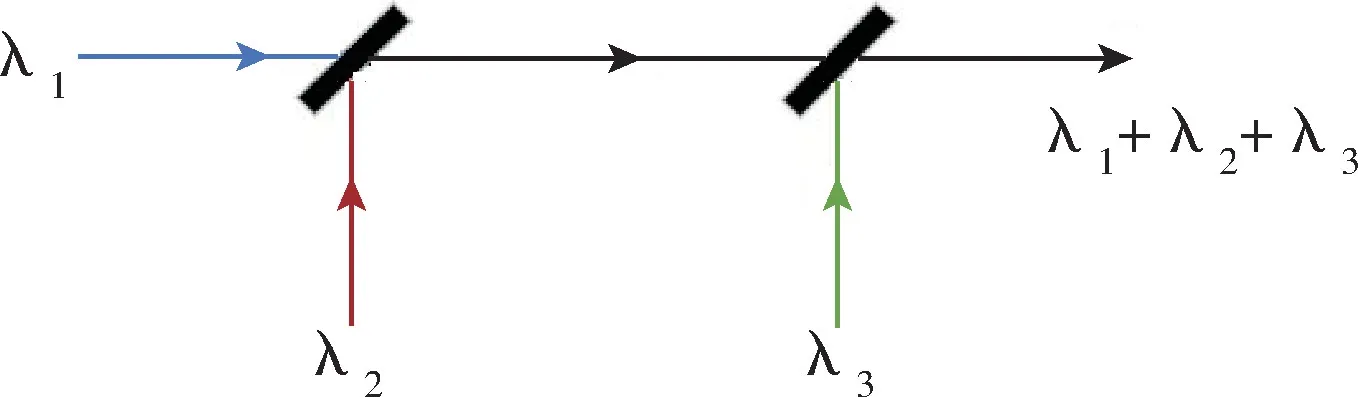
图1 波长合束原理图Fig.1 Schematic diagram of wavelength beam combination
其工作原理是利用二向色镜的分光原理,即利用二向色镜对某一波长带宽内的激光高效率透射,同时对另一带宽内的激光高效率反射,通过调整光学元件的角度使得所有光束最终在近场和远场实现空间重合[11-12]。
但在实际应用中,激光合束系统受振动、温变等各种因素影响会导致子光束指向偏移,进而降低合束激光的光束质量,如图2所示。可以看出,当光束指向存在偏差时,合束光斑在远场重叠度严重下降,输出激光的中心强度也明显下降,进而影响实际应用效果。
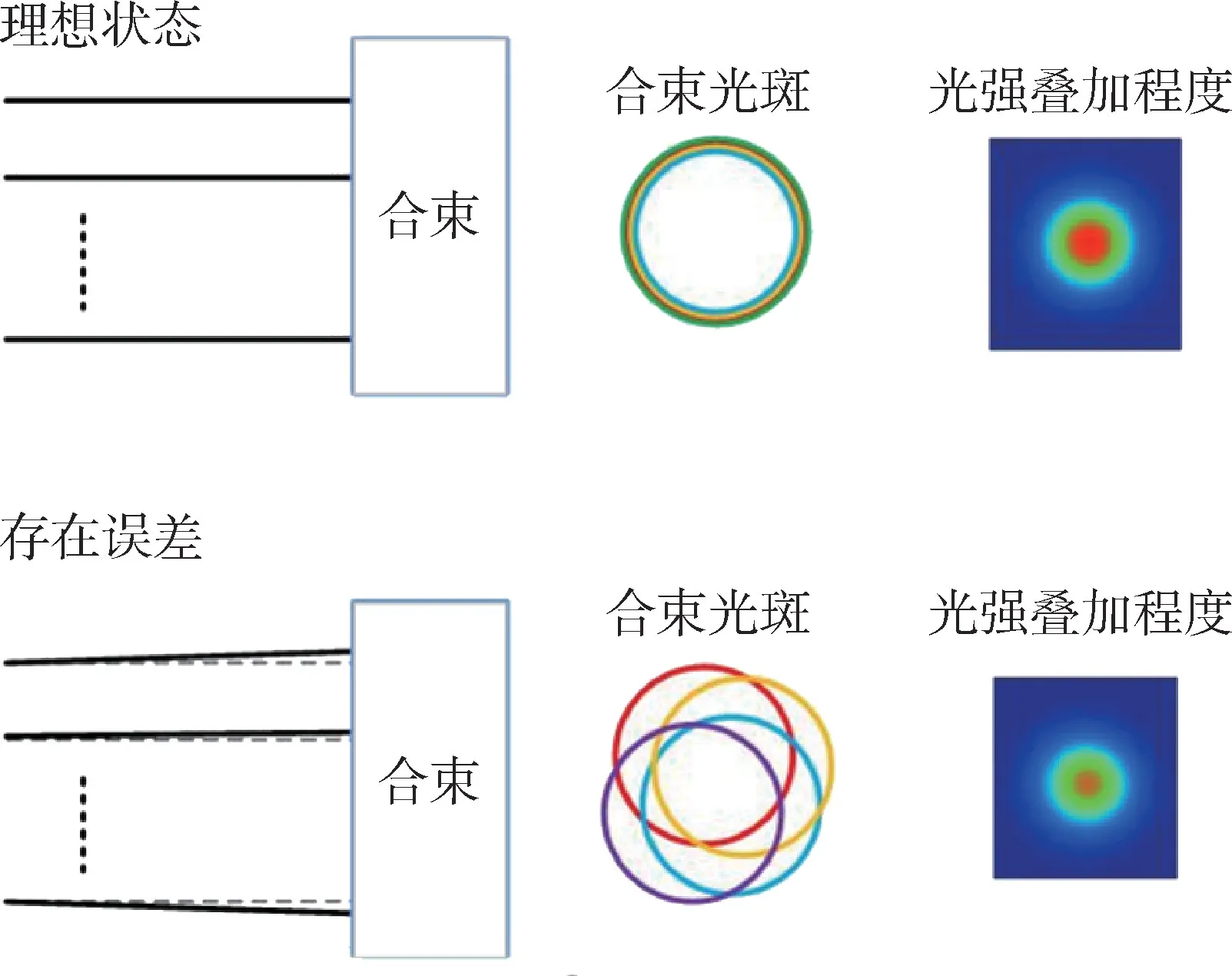
图2 指向偏差对合束的影响Fig.2 Influence of pointing deviation on beam combination
为了进一步探究光束指向偏差对合束性能的影响,现选用两束中心波长分别为1070nm和1090nm的激光束,通过二向色镜进行光谱合束。其中,二向色镜对1070nm的激光具有高反特性,对1090nm的激光具有高透特性。
设两路光束为空间传输的高斯光束,高斯光束在空间坐标系中沿z轴的传输公式如下



式(2)中,θx为光束沿x轴转过的角度,θy为光束沿y轴转过的角度。
合束效率是评价光束合成的重要指标,用来评价合成效果的好坏。现选用合束效率作为评价指标,对于二向色镜合束系统,其合束效率可表示为
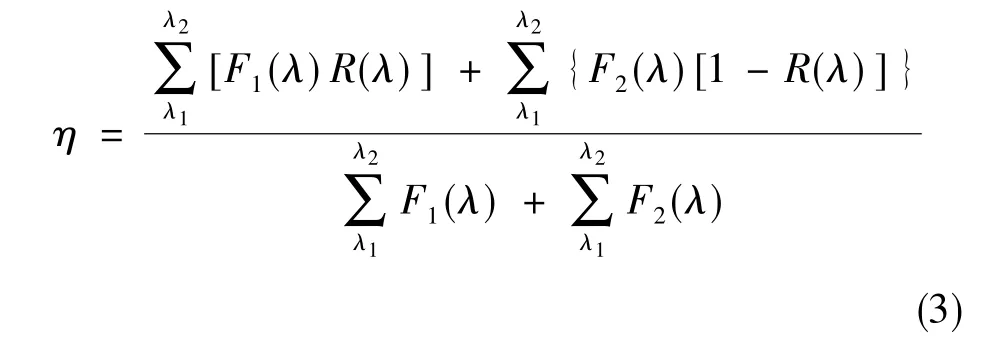
式(3)中,F1(λ)和F2(λ)为入射光光谱,R(λ)为二向色镜反射曲线。使用Matlab软件模拟不同位置和倾斜误差情况下的光束传输,计算不同情况下的光束合束效率,其仿真初始条件如表1所示。

表1 仿真初始条件Table1 Initial conditions of simulation
位置误差是光束在保持平行的条件下在输出面垂直光轴方向上的相对位置发生变化,反映了光轴的整体平移误差。在数值仿真中,通过在原中心坐标位置加上位置扰动,实现不同位置误差下合束效率的计算,计算结果如图3所示。随着位置误差的增大,光束的合束效率显著下降,尤其是误差超过0.5mm时,合成效率的下降更为明显;当位置误差控制在0.75mm内,可保持合束效率在94%以上。
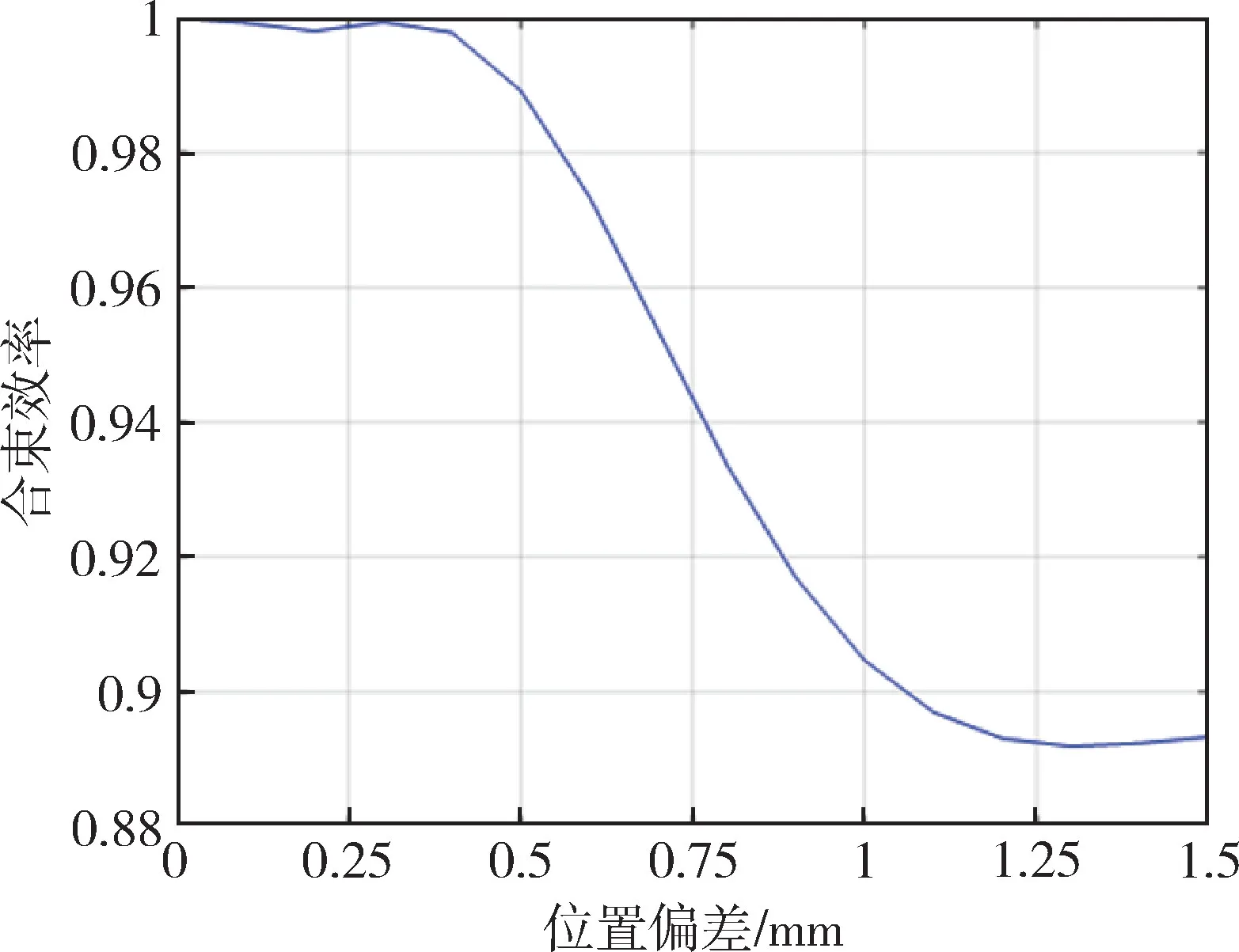
图3 激光器输出端位置误差对合束效率的影响Fig.3 Influence of laser output position error on beam combining efficiency
倾斜误差是指输出光束光轴与理想光轴之间的夹角,其仿真结果如图4所示。随着倾斜误差增大,合束效率也随之下降,要想合束效率保持在97%以上,倾斜误差要控制在0.5mrad内。因此,为了保持较高的合束效率,必须尽可能地减小倾斜误差。
从图3、图4可以看出,光束位置误差和倾斜误差都会严重影响光束合成效率,尤其是在高功率光谱合束中,数十路光束产生的热效应会进一步增大光束的误差,降低合束效率。因此,非常有必要开展光束的指向控制研究,对偏移光束进行校正,以满足实际工作需要。

图4 倾斜误差对合束效率的影响Fig.4 Influence of tilt error on beam combining efficiency
1.2 指向控制系统组成
常见的指向控制系统主要由探测器、处理器、执行器三部分组成,如图5所示。具体工作流程如下:PSD探测器主要用于探测光斑位置,探测器接收到激光信号并得到激光传播方向与光轴的偏差角信号,偏差角信号经过A/D转换后送往算法控制模块,该模块将计算好的控制指令送D/A模块进行转换,经滤波器滤除不必要的信号,然后送放大器放大,再送给压电陶瓷,带动反射镜使其按指定的方式运动,反射镜位置由测量机构进行测量并将结果经A/D转换后送回算法控制器进行再次处理和调节,实现合束系统光束偏转角的实时闭环控制[13-17]。
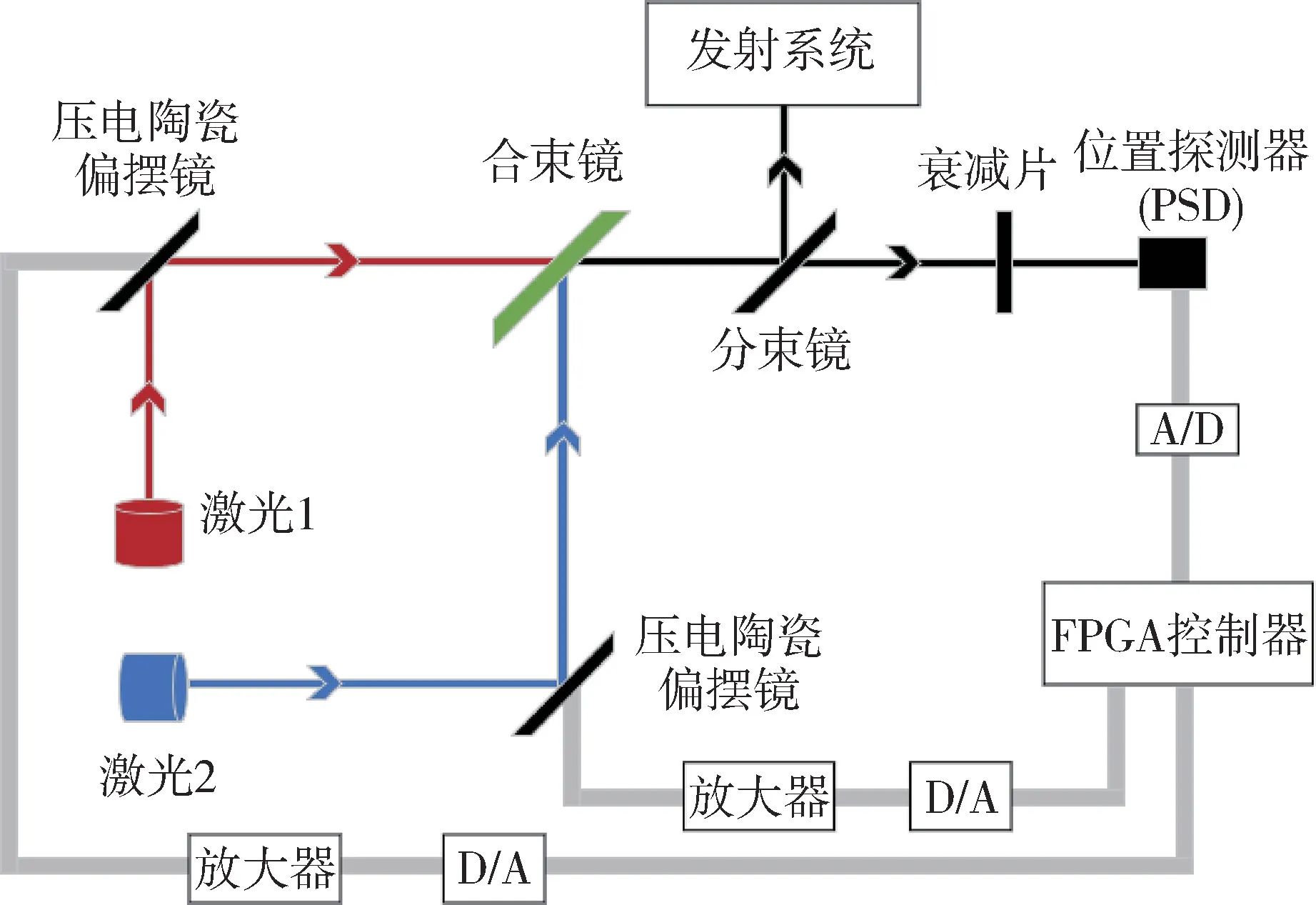
图5 光束监测校正系统示意图Fig.5 Diagram of beam monitoring and correction system
(1)探测单元
应用指向控制系统中的探测器种类繁多,最常用的主要是PSD位置探测器、CCD图像传感器、CMOS图像传感器和四象限探测器等[18-21],主要用来探测光斑位置,经计算得到光束偏转的偏差角信号。上述几种探测器的具体优缺点比较如表2所示。
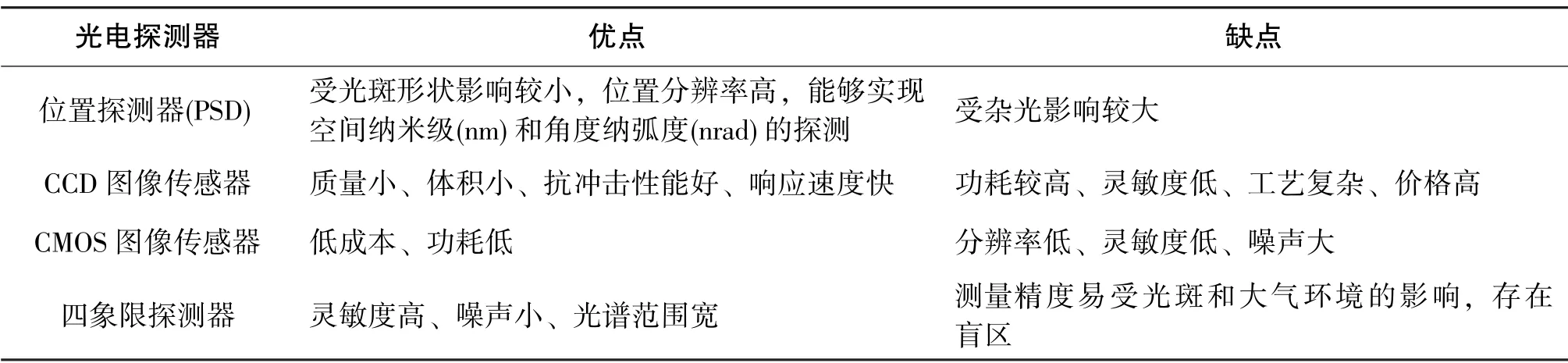
表2 不同光电探测器的对比Table2 Comparison of different photodetectors
通过对比几种光电探测器,可以看出PSD位置探测器和CCD图像传感器具备高分辨、高响应速度的特点,满足指向控制系统的需求,因此被广泛应用于指向控制系统。
探测器放置在分束镜之后,合束光通过分束镜后分为两部分,其中拥有大部分光能的部分进入到激光发射系统,另一部分含有极小光能的部分进入探测器,完成各光束相对光轴的偏转角监测。但是,探测器无法在同一时间内执行多束激光与光轴的夹角测量,只能对一束激光进行准确的角度测量,因此需要一个切换机构使得某一时间只有一束激光聚焦到探测器光敏面上。系统常采用的是切换转轮来完成这一功能,切换转轮与计算机相连,转轮圆盘上的通光孔放置对应激光波长的窄带滤光片,当转轮转动时,即可完成对不同波长激光的选择。转轮结构如图6所示。

图6 切换转轮结构示意图Fig.6 Structure diagram of switching runner
(2)处理单元
在处理单元中,控制算法是核心部分,必须要保证算法收敛精度的同时,提高算法的收敛速度,因此控制算法的选择也是至关重要的。常用的优化算法主要包括模拟退火算法、遗传算法、帝国竞争算法、粒子群算法以及随机并行梯度下降(SPGD)算法等。其中,使用最多的优化控制算法是SPGD算法,SPGD算法通常只需要一个探测器,系统搭建相对容易,控制参数设置简单,收敛速率较高[22-25]。中科院相关研究人员对各种算法在自适应光学中的应用进行了详细的研究,认为SPGD算法是目前收敛速度较快的算法[26]。同时,国内外不少研究人员也都使用SPGD算法作为指向控制中的控制算法。
SPGD算法是一种有效的梯度估计算法,通常选用桶中功率作为性能评价函数,并作为控制依据。控制过程中,先对控制参量并行施加正向的随机微小扰动,获得相应的桶中功率数值;然后并行施加负向的随机微小扰动,并获得其桶中功率数值;之后利用两次扰动大小和桶中功率数值的变化对控制对象的变化进行梯度估计;最后利用这个梯度估计,根据一定的方式更新控制参量,并进行反复迭代,直至控制对象达到最优值,从而实现优化控制。
(3)执行单元
执行器是用来调节光束指向的器件,主要有液晶空间光调制器、自适应光纤准直器和快反镜等,三种执行器的主要优缺点如表3所示。

表3 执行器优缺点的比较Table3 Comparison of advantages and disadvantages of actuator
在下文中,将重点介绍基于这三种执行器的指向控制技术的发展现状和研究进展,并对未来指向技术的发展进行展望。
2 指向控制技术的发展现状和研究进展
2.1 基于液晶空间光调制器的指向控制
液晶空间光调制器是一种动态衍射光学器件,液晶分子的有效折射率可表示为

式(4)中,n0为寻常光折射率,ne为非寻常光折射率,液晶分子的长轴与基地材料层之间的夹角设为α,若晶层厚度为d,则整个液晶材质的有效折射率为所有层的有效折射率的叠加,可表示为

由式(4)、式(5)可知,若改变夹角α,则可以改变液晶材质的有效折射率。在导电层之间放置液晶材料,不向导电层施加电压的情况下,液晶分子的长轴保持与基材平行。当施加到导电层的电压超过液晶分子的阈值电压时,液晶分子偏转,有效折射率发生变化,从而对入射光的相位施加调制使光束偏转。可以根据预先确定的电压大小和偏转角度的关系来产生可控的液晶移相器,其结构原理示意图如图7所示。
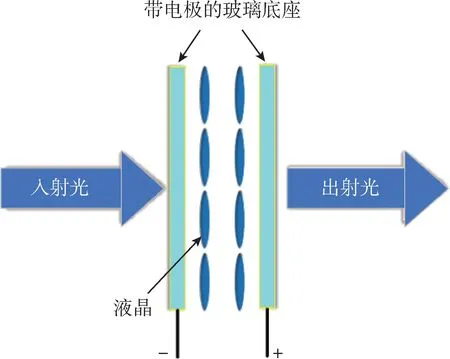
图7 液晶相空间光调制器结构示意图Fig.7 Structure diagram of liquid crystal phase spatial light modulator
与传统机械式控制装置相比,液晶空间光调制器具有结构简单、体积小、成本低、功耗小、响应速度较快等优点,应用前景比较广泛。基于液晶空间光调制器的上述优点,研究人员提出了液晶相控阵、液晶微透镜阵列和液晶偏转光栅等新型光束偏转技术,对光束偏转的控制方式、效率和范围进行了广泛深入的研究。
2005年,Vorontsov[27]提出了自适应光学锁相阵列系统的概念。该系统使用小口径发射阵列代替传统的大口径发射镜,通过控制各个子孔径的相位实现对整体波前畸变的补偿。发射子孔径结构如图8所示。系统中,活塞相位的控制通过相位调制器利用SPGD算法实现,光束倾斜波前的校正则是由发射子孔径端口的透射式液晶空间相控阵实现。

图8 发射子孔径结构示意图Fig.8 Structure diagram of emitter sub aperture
2009年,Engström等[28]利用铁电液晶光学相控阵进行光束的倾斜波前控制,实验系统如图9所示。该液晶空间光调制器可以实现对光轴82°范围内的偏转控制,对0~2π范围的活塞相位可以进行91%的补偿,反应速度约为200μs。

图9 铁电液晶光学相控阵系统光路示意图Fig.9 Optical path diagram of ferroelectric liquid crystal optical phased array system
国内对液晶空间光调制器的研究则主要集中在一些研究所以及高校中,具体的单位包括中国科学院长春光机所以及哈尔滨工业大学等,目前来说还缺少较为成熟的商业产品。
液晶空间光调制器在光束偏转控制方面具有其特有的优势,但是目前而言,其承受功率较低,通常为5W/cm2,而且偏转范围小、偏转速率较慢,因此主要应用在低功率、小偏转角的场合。
2.2 基于自适应光纤准直器(AFOC)的指向控制
自适应光纤准直器(AFOC)是在光纤激光发射端周围安装横向微型压电陶瓷片的集成器件,该器件通过控制施加在压电陶瓷上的电压对光纤的横向位置进行调整,改变光纤发射端在发射透镜焦平面的位置,从而实现对发射光束波前高速精确的指向控制[29]。AFOC具有精确控制、惯性小、谐振频率高、结构紧凑等优点,其具体结构如图10所示。

图10 自适应光纤准直器结构示意图Fig.10 Structure diagram of AFOC
2007年,Liu等[30]利用3个AFOC构成了共形发射阵列,采用SPGD算法研究了在相干合成中倾斜波前和活塞相位的控制,同时实现了全保偏光纤结构的锁相控制和指向控制。倾斜控制是通过压电纤维定位器实现的,压电纤维定位器由SPGD控制器调制,倾斜SPGD控制器的扰动率高达每秒约950次迭代,倾斜补偿带宽在60μrad时达到10Hz。
2012年,国防科技大学的王雄[31]利用AFOC为控制器件、高速CMOS相机为探测器件进行了两路光纤激光相干合成实验研究,该实验实现了350W的合成功率输出,记录了开环状态下、锁相状态下、倾斜控制状态下以及锁相和倾斜控制同时进行状态下的实验数据,实验结果如图11所示。可见,倾斜控制可以使两个分离光斑实现有效重合,归一化PIB值从0.27提升至0.99,条纹对比度从0提升至97%,控制效果显著。
2012年,Goodno等[32]提出了一种偏振相干合成指向控制方案,利用该方案实现了在主动锁相的相干合成阵列中光束的高精度对准,实验结构如图12所示。活塞相位控制由相位调制器实现,倾斜波前控制利用带有压电陶瓷的光纤准直器实现。该方法通过光学转换将光束的指向误差转换为活塞相位误差,然后利用SPGD算法对活塞相位误差进行校正;校正电压信号分别施加到相位调制器和光纤准直器的压电陶瓷上,从而达到校正活塞相位和倾斜波前的目的。

图12 5单元偏振相干合成系统结构示意图Fig.12 Structure diagram of5-cell polarization coherent synthesis system
实验结果如图13和图14所示,图13为系统开环(无倾斜和锁相控制)情况下合成光斑的长曝光图案,图14为闭环(倾斜和锁相同时控制)情况下的光斑图案。对比开环和闭环情况下的合成光斑,可发现控制效果明显,原来分散的光斑高度重叠在了一起,合成光斑能量高度集中。
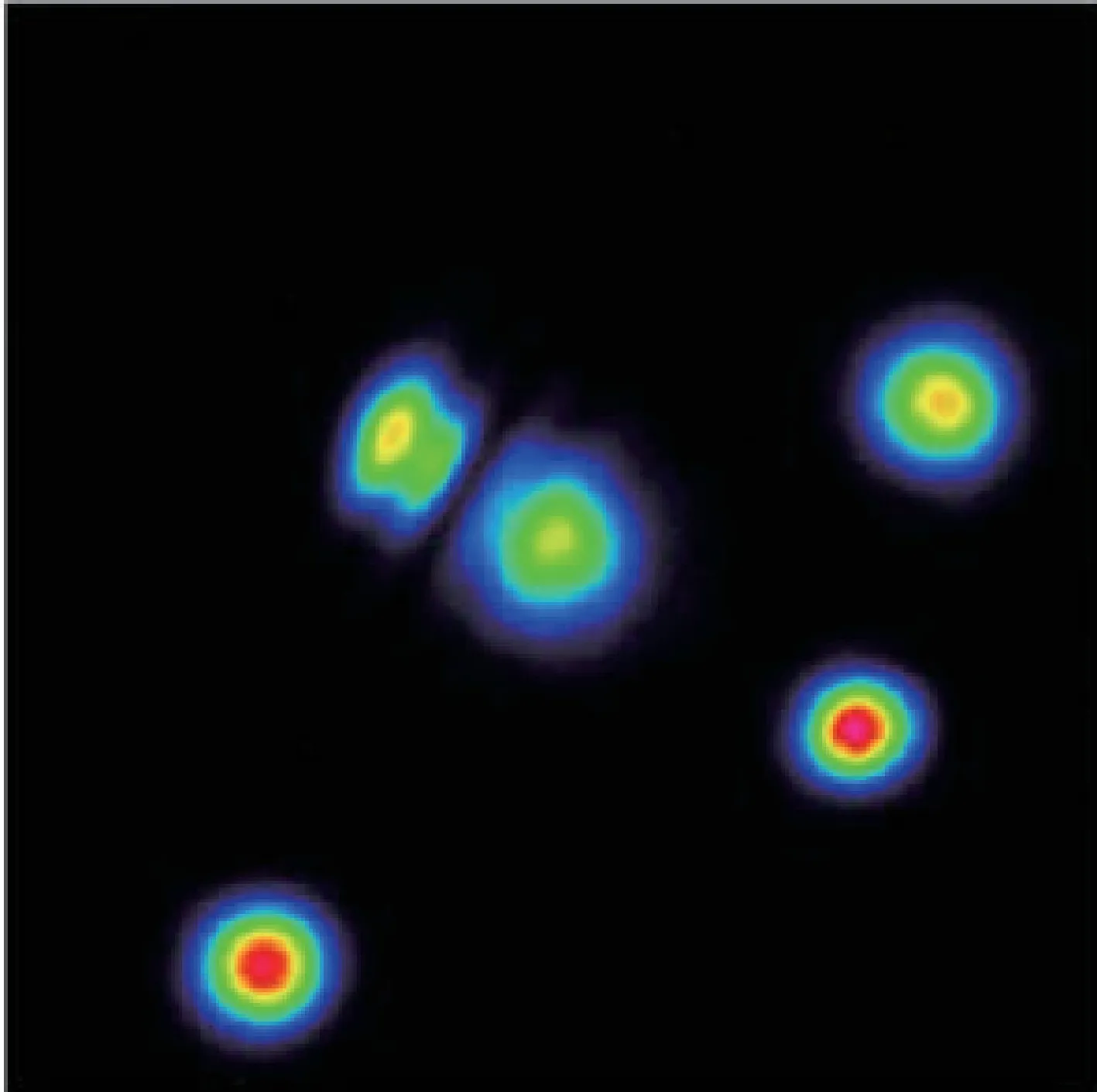
图13 开环状态下相干合成系统光斑图Fig.13 Spot pattern of coherent synthesis system in open-loop state

图14 闭环状态下相干合成系统光斑图Fig.14 Spot pattern of coherent synthesis system in closed-loop state
2015年,中科院光电所的谭毅[33]报道了基于AFOC的七单元光纤激光阵列相干合成实验,在200m实际大气湍流环境下单路激光功率为150mW。在7路相干合成实验中,阵列闭环后平均探测回光功率由0.32V上升至1.93V,并且在5s的曝光时间内获得了接近理想的干涉条纹,如图15所示。2018年,中科院光电所的耿超等[34]报道了自主研制的七单元光纤激光阵列在200m大气传输距离下的湍流补偿结果。实验结果显示,当系统闭环后,30s曝光时间内目标处获得了接近理想的干涉条纹。

图15 7单元光纤激光阵列大气传输校正结果Fig.15 Atmospheric transmission correction results of 7-cell fiber laser array
目前利用AFOC进行的倾斜波前控制获得了良好的效果,但是当前研究都是在低功率情况下进行的,AFOC在大功率应用和高光束质量输出等方面尚需进一步的研究。对于大功率的激光输出,包括横梁的热变形对于指向控制效果的影响以及光纤头的挤压变形对于出射光束的影响都缺乏理论上的证明,因而限制了其在高能激光领域上的应用[35-37]。
2.3 基于快反镜的指向控制
快反镜是在驱动器上安装一块小面积的反射镜,通过高速率、高精度地改变施加在器件上的电压大小,控制反射镜高速摆动,使其反射光束波前产生快速、小角度的倾斜变化,达到波前指向控制的目的。与传统的电机驱动器件相比,快反镜具有运动惯性小、响应速度快、角分辨精度高等显著优点[38-40],其原理图如图16所示。
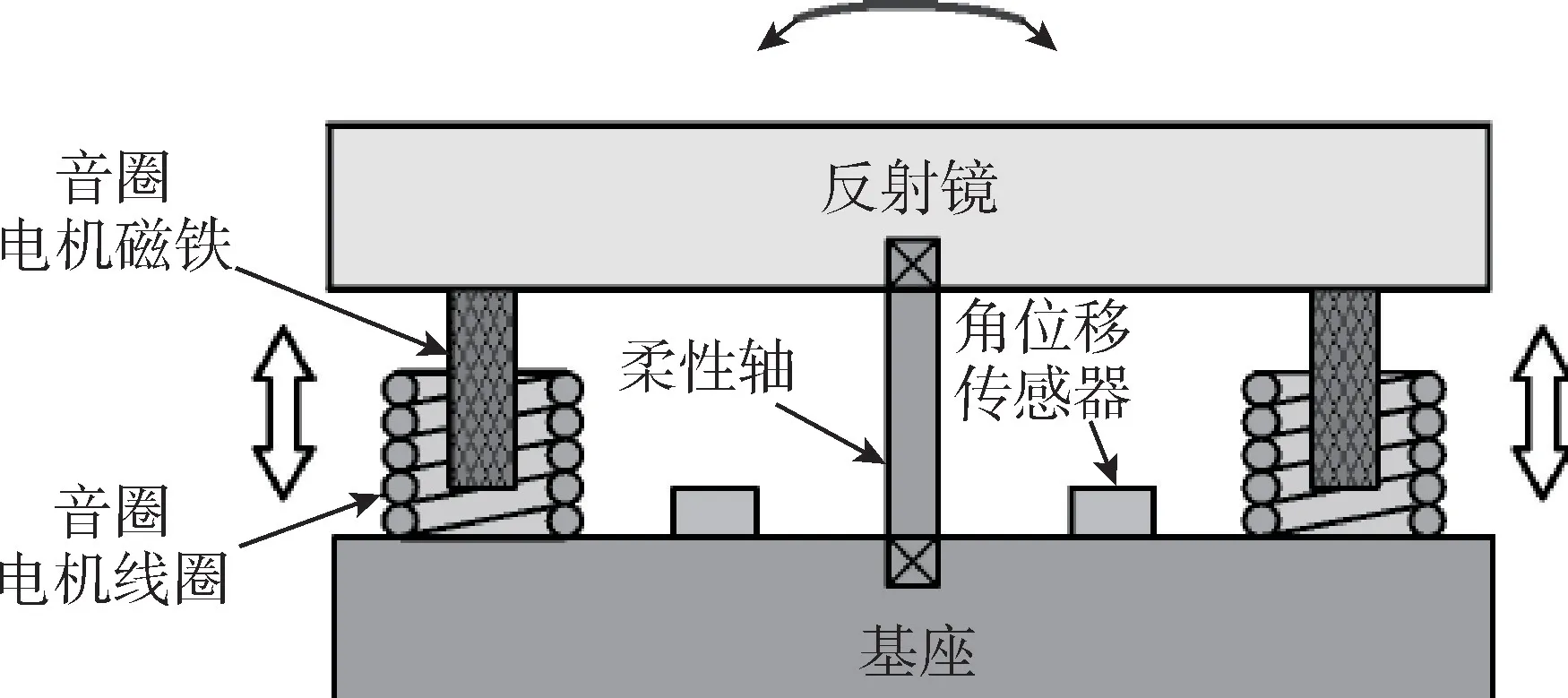
图16 快反镜工作原理示意图Fig.16 Working principle diagram of fast steering mirror
2006年,Wilcox等[41]将微机电阵列反射镜组装在一个双轴倾斜平台上,从而同时实现单元光束的活塞相位和倾斜波前畸变的补偿,该实验装置如图17所示。其中,微机电阵列用来补偿活塞相位,快反镜可以实现±2mrad范围内的光束偏转控制。该装置简化了相干合成的光路结构,降低了系统的复杂性。

图17 微机电阵列快反镜系统结构示意图Fig.17 Structure diagram of MEMS array fast steering mirror system
2011年,谭逢富等[42]利用压电陶瓷快反镜对激光在大气中传输的倾斜波前进行了校正。该系统结构如图18所示,通过位敏传感器PSD进行光束位置的探测,采用PID控制算法,利用快反镜对倾斜波前误差进行实时补偿。实验结果表明,系统具有很好的鲁棒性,对50Hz以内、振幅为4.5μrad的倾斜误差校正效果明显,跟踪精度可以到达0.6μrad。

图18 快反镜指向控制系统结构示意图Fig.18 Structure diagram of fast steering mirror pointing control system
2019年,多普勒实验室的Csencsics等[43]设计出了一种基于混合磁阻致动器的、紧凑型的、高度集成化的快反镜系统。该快反镜系统的驱动器以永磁体来产生恒定磁通量偏置磁路,并通过两对线圈产生转向磁通量,从而使动子绕两个系统轴旋转。在高达200Hz的两个旋转自由度上,该系统可以提供的偏转角度范围为±52.4mrad,同时对两个系统轴均具有1.5kHz的小信号闭环带宽。
随着快反镜的进一步发展,目前快反镜技术已经相当成熟,不仅可以应用于湍流中传输的光束校正,也在高功率激光合束中作为指向控制元件发挥着不可替代的作用。北京航天控制仪器研究所就在高功率激光合束的指向控制上实现了突破,以压电陶瓷偏摆镜为驱动元件、位置探测器为探测元件,完成了6路单模光纤激光器的空间合束,实现了6路的闭环反馈控制,其实验装置如图19所示。

图19 6路空间组束激光控制系统示意图Fig.19 Schematic diagram of6-channel space beam laser control system
该系统由6个单模光纤激光器组束而成,各路单模光纤激光器发出激光,每路激光功率超过2kW,经过准直由空间光路折返,拼接成环形光斑。如图20所示,探测装置采用德国TEM公司的位置探测器,可实现空间纳米级(nm)和角度纳弧度级(nrad)的探测。位置探测器实现对激光入射角度的测量,将激光入射的角度值转换成电信号传输给光束平行控制器,光束平行控制器接收PSD电信号,计算各个激光与基准激光的角度差,通过控制压电陶瓷偏摆镜实现激光传输方向的控制,确保激光的平行度,其实验结果如图21、图22所示。

图20 位置探测器实物图Fig.20 Physical drawing of position detector
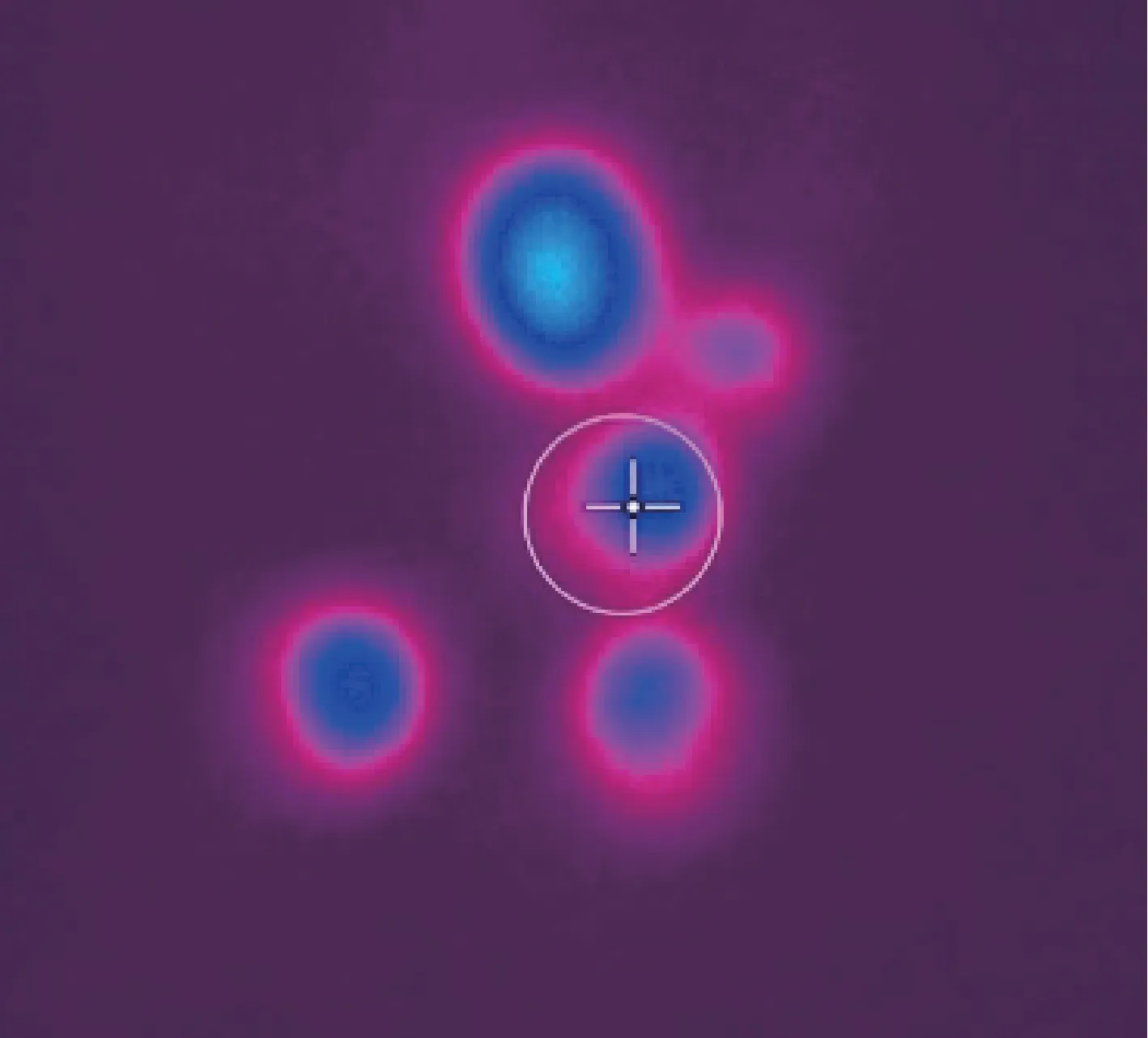
图21 开环状态下6路闭环反馈控制实验光斑图Fig.21 Spot pattern of6-channel closed-loop feedback control experiment in open-loop state
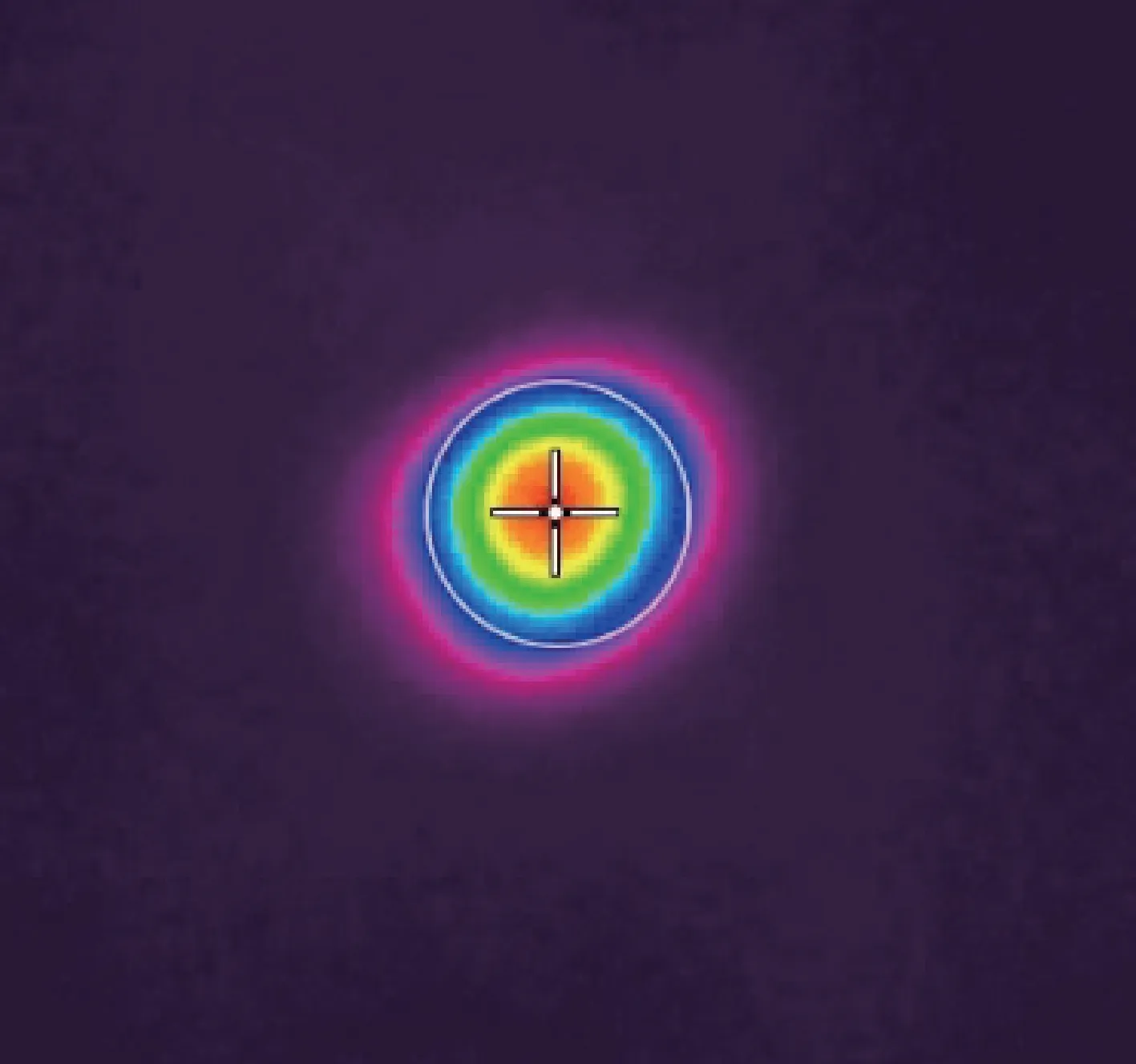
图22 闭环状态下6路闭环反馈控制实验光斑图Fig.22 Spot pattern of6-channel closed-loop feedback control experiment in closed-loop state
通过对比可以看到,图22的校正效果显著。进行闭环指向控制校正后,原来分散的光斑高度重叠在了一起,合成光斑的能量也高度集中。其中,指向控制精度优于5μrad,控制带宽高于10Hz。
3 发展趋势展望
目前来说,液晶空间光调制器具有较大的灵活性,但是偏转效率低下、承受功率不高的问题极大地限制了其应用;AFOC对波前的指向控制简单有效,但是很难应用在高功率合束中,其自身对光束质量的影响较为明显;快反镜响应速度快,并且可以应用于高功率激光合束中,是高功率激光合束中最为重要的器件。对于高功率指向控制系统,未来发展也面临以下问题,相关技术仍需开展深入研究。
光束指向控制的算法改进是大阵列合束中的关键技术之一。随着激光合束技术的不断发展,合束系统中激光路数不断增加,光束指向控制技术也将更多的应用在大阵列控制中,这对控制算法提出了很高的要求。在数十路光束合成系统中,随着系统探测噪声的增大,探测信噪比不断下降,这将严重降低控制算法的性能指标,所以需要考虑探测噪声的抑制方法,来满足大阵列指向控制的需要。由于大阵列控制系统中激光路数的增多,系统带宽也会严重降低,因此还需要在控制算法的带宽优化上进一步提升,以满足实际应用需求。SPGD算法是目前应用最多的算法,当远场各单元光斑彼此偏差角度不是很大,即各光斑总有重叠部分时,算法可以对倾斜误差进行有效的校正,但是单元光束彼此完全分离时,算法的控制效果大大降低,因此可以将性能评价函数PIB的环围半径根据光斑离散情况进行调整,同时SPGD算法的控制参数也做自适应调整,从而在更大的光束偏离范围有效地实现校正。
其次,多光束合束中,闭环控制的执行元件需要在扩大控制范围的同时提高控制精度,并降低功耗。快反镜作为执行装置,要求其具有大作动量、高精度、高响应的能力。目前,快反镜的驱动装置主要是压电陶瓷和音圈电机两种驱动器:压电陶瓷驱动器控制精度高,但是由于压电材料伸缩量的限制,控制行程较小,很难满足大范围偏转的合束系统应用需求;相比于压电陶瓷,音圈电机控制行程更大,但是其耗电量更大、发热量更大的劣势在一定程度上也限制了其应用。因此,需要进一步开展压电陶瓷驱动快反镜的最优设计方法,也可以寻找、设计控制行程更大、控制精度更高的驱动器,应用于激光光束指向控制系统,满足日后远距离、高精度的控制需求。
最后,在光电探测方面,还需要提高探测精度的同时降低功耗。PSD位置探测器和CCD图像传感器是应用最多的探测器件,用以获取反馈信号。它们可以直观地反映远场光斑的形态,但也具有其固有的劣势:PSD探测器很容易受到杂光影响,进而影响其探测精度;而CCD图像传感器虽然成像质量较好,但是由于自身功耗过大且制作工艺非常复杂,也在一定程度上限制了其应用。因而在实际应用中,还需要不断拓展新型的光电传感器在高功率合束系统中的应用,构建多传感器协同配合体系,发挥优势互补,满足实际工作需求。
4 结论
激光合束技术是实现大功率激光输出的重要技术途径,而激光合束技术中对单束激光的指向控制技术对于提高激光合束的效率具有重要意义。文中介绍了指向控制技术的基本原理,分析了光束指向误差对合束效率的影响,对不同指向控制器件的优缺点进行了比较,总结了指向控制技术的发展现状,并对未来发展趋势进行了展望。光纤激光器激光合束的指向控制研究取得了一定的进展,但缺乏更为深入、全面的理论分析,后续还需要在高功率激光合束实验中进一步验证指向控制系统的可行性,满足激光武器的高功率光源需求。相信在不久的将来,上述技术一定会有重大突破,应用指向控制技术也一定可以实现大于百千瓦输出功率的高亮度光束合成。
猜你喜欢
诗歌月刊(2023年1期)2023-03-22
数学物理学报(2021年6期)2021-12-21
奥秘(2021年3期)2021-04-12
液晶与显示(2020年8期)2020-08-08
阅读(高年级)(2019年9期)2019-11-15
阅读与作文(小学高年级版)(2019年8期)2019-10-16
光学精密工程(2016年6期)2016-11-07
中国医疗美容(2015年1期)2015-07-12
红领巾·探索(2014年1期)2015-03-16
液晶与显示(2015年1期)2015-02-28