
车路协同下的基于S函数的交叉口平滑车速引导方法*
2022-07-28 02:01王梦丹杨建森陈美奇许扬眉
汽车电器 2022年7期
郭 蓬,王梦丹,杨建森,陈美奇,蔡 聪,许扬眉
(1.中国汽车技术研究中心有限公司;2.中汽研(天津)汽车工程研究院有限公司,天津 300300)
1 引言
近年来汽车行业发展迅速,交通拥堵及环境污染问题同时接踵而来。为了解决这些问题,各国开始大力发展智能交通系统,其中车路协同系统逐渐成为研究热点。道路交通中,信号交叉口是交通延误最大的地方之一,“一路绿灯”的实现不仅能提高信号交叉口的通行效率,还能减少车辆燃油消耗。车路协同系统的发展,使车辆和路侧设施——智能红绿灯之间可进行通信,车速引导能有效弥补传统信号控制下车辆被动响应的局限,是未来提高信号交叉口通行效率的一种有效方法和研究方向。
目前,国内外学者提出了多种基于车路协同系统或智能交通下的车速引导模型。王文辉等设计了一种闭环反馈速度更新算法,以动态补偿人车响应特性造成的跟踪偏差;贾丰源等搭载了车载交通灯提醒系统,提出车路协同环境下的车速引导策略;徐丽萍等以车辆列队为引导单元,将车辆可能面临的交通状况细分为8种引导场景,以引导车辆不停车或少停车通过交叉口为目标,直接优化车辆加/减速度,建立车辆列队后车根据改进的跟驰模型计算目标跟驰加/减速度,并与头车组成列队以同一目标车速通过交叉口停车线的4种车速引导模型;张雪等通过创建绿灯期间车速引导模型和红灯期间车速引导模型,构建以最优车速通过信号交叉口的车速引导模型,以减小信号交叉口的平均延误和排队长度。
大部分车速引导算法策略没有考虑到驾驶员需要频繁制动或车辆速度突变带来的影响。因此本文提出一种交叉口平滑车速引导方法,通过对进入交叉口引导区间的车辆进行车速引导,尽可能做到不停车通过交叉口,减少等待时间,提高通行效率,同时利用S形加减速算法,使得速度曲线平滑,提高驾驶平稳性。
2 车路协同环境搭建
2.1 车路协同系统
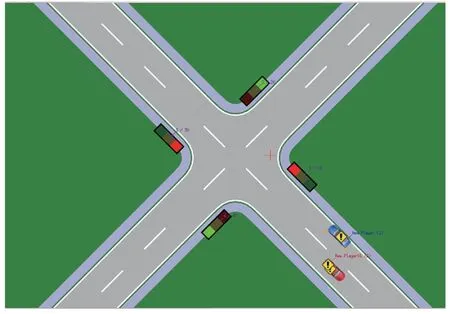
图1为本研究的交叉路口车路协同环境。在交叉路口布设智能红绿灯,同时信号灯控制器与RSU进行连接,实时向周围的车辆广播车辆所处位置的地图消息及红绿灯消息;车辆装载车载单元OBU,一方面实时接收路口的红绿灯消息及地图消息,另一方面实时收集自身车辆状态信息,包含位置点、速度、加速度等。
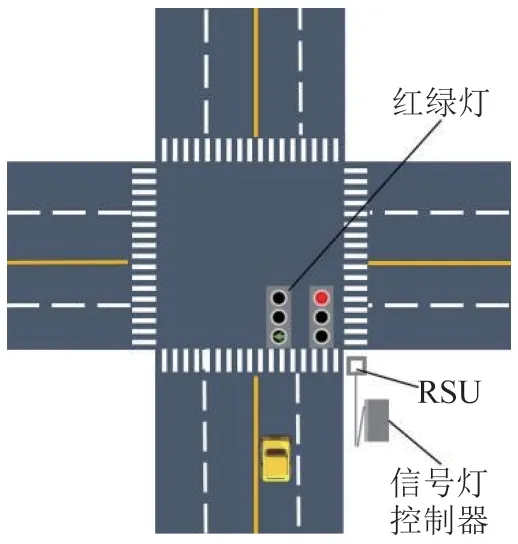
图1 交叉路口车路协同环境
2.2 基本假设
为简化研究的问题,本文提出的研究方法基于以下基本假设。
1)单车与信号交叉口之间的信息交互,前方无车辆影响。
2)不受横向车辆和交叉口转弯车辆影响。
3)不考虑天气、路面条件的影响,只考虑汽车本身的车速限制。
3 基于S函数的交叉口平滑车速引导算法
本文设计的基于S函数的交叉口平滑车速引导算法流程如图2所示,包含以下步骤。
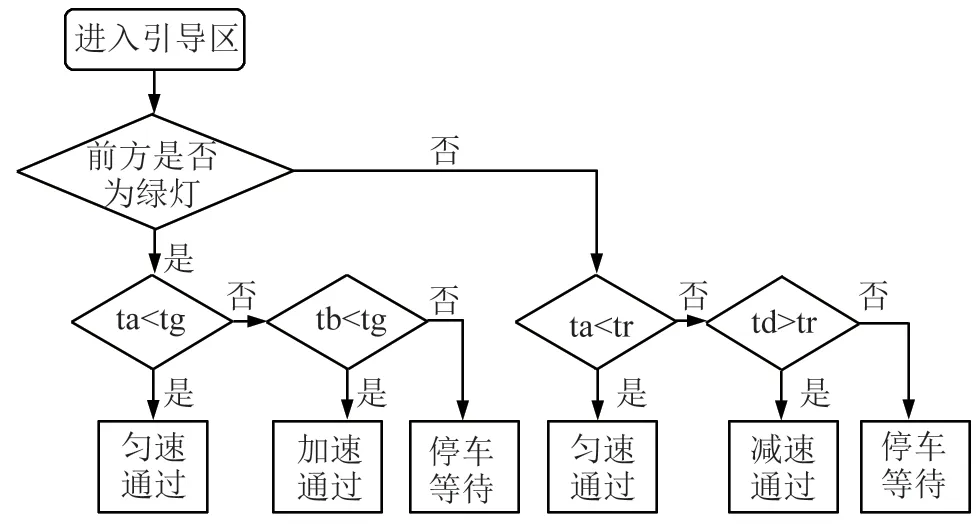
图2 基于S函数的交叉口平滑车速引导算法流程图
1)步骤1:车辆进入引导区间,通过V2X通信技术,车辆与信号灯进行信息交互,判断当前信号灯的颜色,若为绿色则执行步骤2,若为黄色或红色则执行步骤4。
2)步骤2:根据公式(1)计算得到车辆行驶至停止线的时间t为:

式中:L——目标车辆距停止线的距离;v——目标车辆进入到引导区间时的速度。
若t≤t,则车辆匀速通过停止线,输出建议车速v。
3)步骤3:若t>t,根据公式(2)计算变加速a。车辆以变加速a,加速到最高限速v。
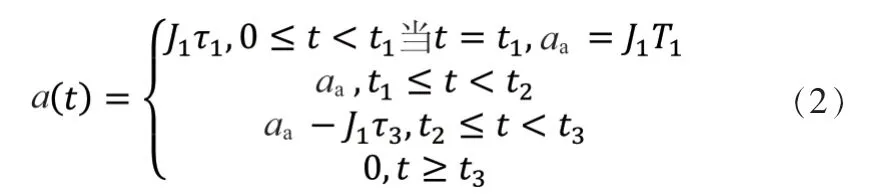
式中:T=t-t,T——每个阶段持续的时间;τ=t-t,τ——当前时刻在第k个阶段持续的时间,加加速J恒定且
T=T。
绿灯加速过程中,为了使速度曲线平滑过渡,速度v先经过加加速达到v,再经过匀加速达到v,最后再经过减加速达到v。根据公式(3)可得到各个时刻的速度。
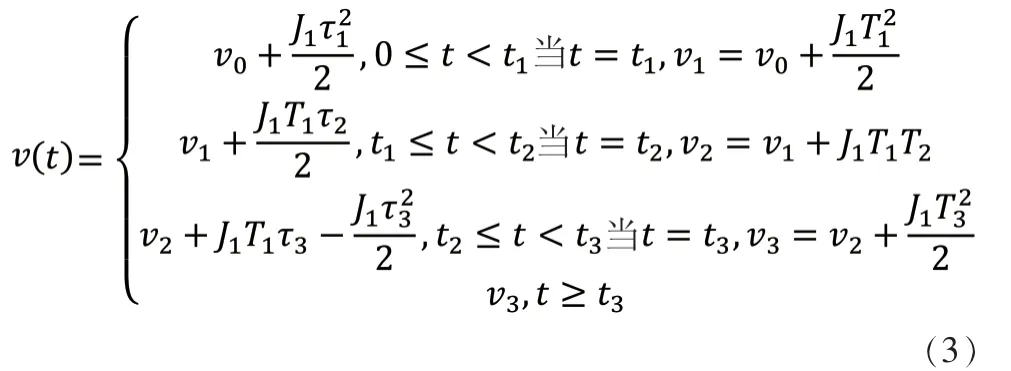
式中:v=v。
根据公式(4)计算得到每个时刻行驶的距离为S。

根据公式(5)计算车辆到达停止线的时间t,若t≤t,则车辆加速通过,否则停车等待。

式中:T——加加速行驶的时间;T——匀加速行驶的时间;T——减加速行驶的时间;S——变加速过程行驶的位移距离。
4)步骤4:根据红灯的剩余时间t、车辆驶至停止线的时间t,判断车辆行驶至停止线的时间是否大于红灯剩余的时间,若t>t,则车辆匀速通过停止线,输出建议车速v。
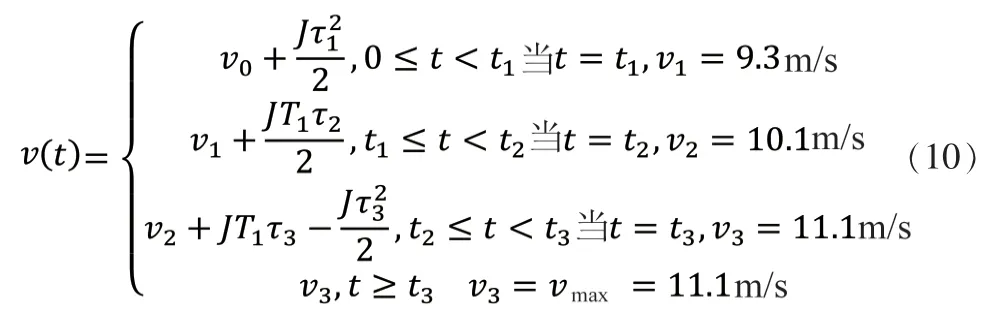
5)步骤5:若t≤t,车辆减速行驶,根据公式以变减速a减速到最低限速v,并根据减速行驶的距离计算车辆达到停止线的时间t,若t 若t≤t,车辆减速行驶,根据公式(6)计算变减速a,即车辆减速到最低限速v。 红灯减速过程,为了使速度曲线平滑过渡,根据公式(7),速度v先经过加减速达到v,再经过匀减速达到v,最后再经过减减速达到v。 式中:v=v。 根据公式(8),每个时刻行驶的距离为S。 综上所述,根据公式(9),车辆到达停止线的时间t为: 式中:T——加减速行驶的时间;T——匀减速行驶的时间;T——减减速行驶的时间;S——减速过程行驶的位移。 图3为使用VTD软件对车路协同环境下基于S函数的交叉口平滑车速引导方法模型进行测试,通过模型结果验证模型的整体功能和效果。 图3 仿真模型 在本文设计的车路协同环境下基于S函数的交叉口平滑车速引导方法模型中,道路模型设置为双向两车道,长度为500m,引导区长度L为300m,信号灯周期C为120s,其中绿灯时长T为60s,黄灯时 长T为3s,红灯时 长T为57s,车辆车速v为30km/h,加速度a为2.0m/s,减速度a为-2.0m/s,加加速J为2.0m/s,进入引导区时剩余绿灯时间t为35s,道路限速为:v为20km/h,v为40km/h。 车辆通过OBU实时采集车辆位置、速度、加速度等信息,进入到引导区后,自动接收信号灯相位和配时信息。根据车辆前方道路的红绿灯色、剩余时间以及距离路口停车线的距离,对进入引导区车辆的引导速度进行预判,最终可以获得车辆可以加速通过,且具体速度变化如公式(10)所示。 图4为有无车速引导的情况下,车辆在交叉路口引导区域的速度变化图,时刻点t为加加速结束时刻点,t为匀加速结束时刻点,t为减加速结束时刻点。从图4中可以看出,当无车速引导时,车辆一直匀速行驶,当接近交叉路口时判定无法通过后减速停止在路口停止线前;当基于本文设计的车速引导模型时,车辆进入加加速阶段,之后进入匀加速阶段,最后进入减加速阶段,最终可不停车通过交叉路口。综上所述,本文设计的车路协同环境下基于S函数的交叉口平滑车速引导方法可以做到不停车通过交叉路口,提高交通通行效率,同时使建议速度变化平滑,提高驾驶平稳性。 图4 引导区域车辆速度变化图 本文提出的车路协同环境下基于S函数的交叉口平滑车速引导方法,通过对进入交叉口引导区间的车辆进行车速引导,尽可能做到不停车通过交叉口,减少等待时间,提高通行效率,同时利用S形加减速算法,使得速度曲线平滑,提高驾驶平稳性。



4 模型分析
4.1 模型参数设置
4.2 仿真结果分析

5 总结
