井下甚宽频带地震仪关键装置研究进展*
2022-07-27 06:26关作金庞锦标
地震科学进展 2022年7期
周 超 关作金 李 丽 庞锦标 曹 骏
1) 珠海市泰德企业有限公司,广东珠海 519082
2) 中国地震局地球物理研究所,北京 100081
每一次新技术的引入都为地震仪带来飞跃的发展。其中,力平衡反馈技术的应用是近代以来地震仪发展史上一个比较重大的进步,反馈式地震仪的出现在地震仪的发展历史上具有划时代的意义。反馈网络的出现摆脱了地震仪对机械的完全依赖,使得地震仪的观测频带和响应类型主要由电子反馈来决定,通过改变反馈网络,就可以改变地震仪的响应类型、响应通频带、灵敏度和动态范围等,甚至在很小的机械框架的基础上实现宽频带长周期地震仪,使得宽频带地震仪的小型化成为现实。反馈技术使得仪器开发者研制、调试、生产地震仪变得简单方便[1]。
测震台站地震仪方位的精确定向对于利用地震观测资料开展各向异性、面波频散、接收函数和震源机制解等研究具有重要意义[2]。井下定位定向技术,是井下甚宽频带地震仪能否获得高质量数据的一个关键因素。井下探头能否刚性的和井壁耦合对获取地震信号的优劣至关重要,在2 000 m深的井底,需要方便准确地知道探头的安装方向,是地震学家一直未解决的一个难题。
1 分向核心芯体机械及簧片系统
1.1 分向核心芯体机械系统
井下甚宽频带地震仪芯体由框架、重锤、挂簧、十字簧片等部件构成弹性振动系统,由主磁钢、工作线圈、反馈线圈、标定线圈、标定磁钢等部件构成速度换能系统(图1左)。水平分向和垂直分向传感器核心芯体如图1右所示。
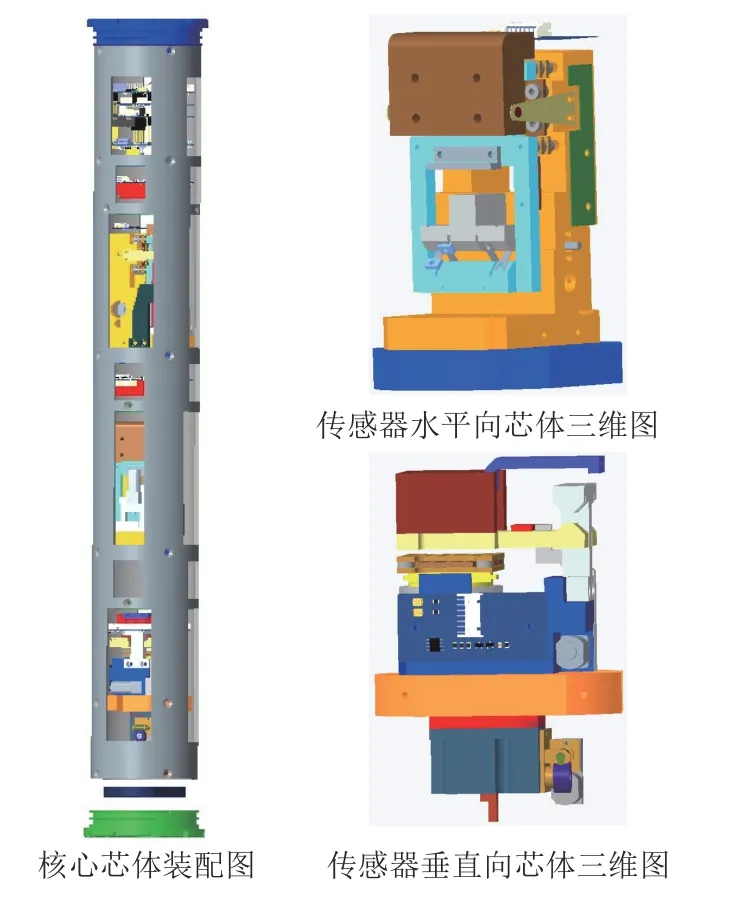
图1 三分量核心芯体三维结构图Fig. 1 3D structure graph of 3-components core module
弹性系统采用旋转型复摆结构,使用十字交叉簧作旋转轴。垂直分向使用叶簧悬挂,水平分向使用钢丝和叶簧悬挂。拾震器上设计有机械周期调节螺钉和零点调节螺钉,还使用了包含重锤锁紧和十字簧片锁紧相组合的锁紧方式的锁紧装置。
分向核心芯体机械及簧片是一套精密的机电结构,由三分量独立的传感器安装在对振动敏感、固定牢靠的仪器罩内。每个传感器由内置精密转轴及摆体、片簧、精密差分电容传感器、电机自动调零机构、反馈系统、锁摆开摆机构等核心组件紧凑组成(图2)。

图2 三分量核心芯体样机图Fig. 2 A prototype of 3-components core module
三分量传感器的每分向重量600 g左右,尺寸80 mm×70 mm×60 mm左右,传感器由多种材料组成,以铜、铝、电机、不锈钢磁缸、簧片等金属材料为主,以陶瓷、线圈骨架、PCB玻纤板等非金属材料为辅。
1.2 传感器结构
图3是井下甚宽频带地震核心传感器组成图。精密转轴由连接到固定部件的上梁、连接到运动部件的下梁以及连接上、下梁的十字片簧组成(图4)。
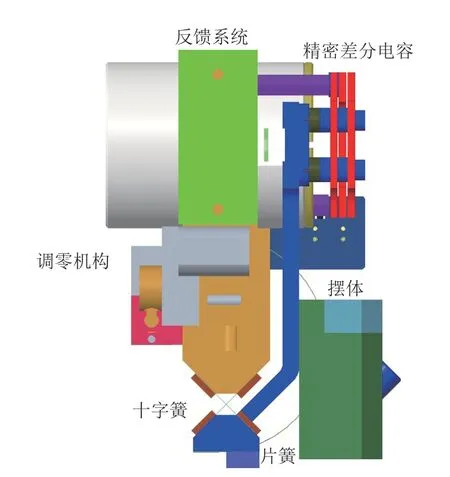
图3 传感器机构组成图Fig. 3 Component structure graph of sensor module

图4 精密转轴Fig. 4 Precision shaft
片簧连接摆体的运动部件和固定部件,使运动部件相对于固定部件移动(图5)。精密差分电容传感器连接固定部件和运动部件的上端,通过检测固定部件与运动部件电极之间的电容差,将摆体的相对位移变化转换为调制电压,实现摆体运动部件位移的精密测量。

图5 片簧Fig. 5 Reed
2 核心反馈调理线路系统
力平衡反馈技术的应用是近代以来地震仪发展史上一个比较重大的进步。反馈网络的出现摆脱了地震仪对机械的完全依赖,使得地震仪的观测频带和响应类型主要由电子反馈来决定,通过改变反馈网络,就可以改变地震仪的响应类型、响应通频带、灵敏度和动态范围等,甚至在很小的机械框架的基础上实现宽频带长周期地震仪,使得宽频带地震仪的小型化成为现实。
甚宽频带反馈地震仪主要由机械摆、换能器、放大器和反馈电路等组成(图6)。反馈是指将位移换能器输出的信号通过 PID(比例、微分、积分)电路组成的一定形式的网络变换而产生相应形式的电流,电流通过地震仪的反馈线圈,在磁场作用下产生一个作用在地震仪上的力(或力矩),这样就构成了一个闭环反馈系统。井下甚宽频带地震仪的力平衡反馈系统布置在精密差分电容传感器的一侧,由磁缸系统、反馈线圈、反馈电路等部分组成(图7)。通过对电压实施比例、微分、积分控制,使磁缸内部反馈线圈产生恢复力,实现电磁力和外力的平衡,构成一个机电耦合闭环反馈系统。
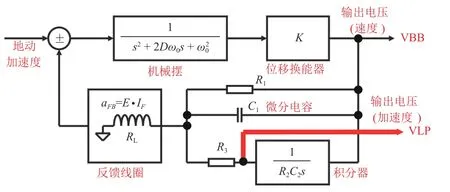
图6 甚宽频带地震仪反馈模型框图Fig. 6 Illustration graph of very broadband seismograph feedback module

图7 传感器力平衡反馈系统的机械结构Fig. 7 Machinery of force equilibrium feedback system of sensor
地震仪的反馈电路由比例、微分、积分3条支路组成,即控制论中经典的PID 控制。反馈地震仪输出电压对地动速度的传递函数为式(1),自振周期T和阻尼D为式(2):
人的自由全面发展是马克思人的解放理论的旨归,而人的共同体则是保障人的自由全面发展的社会形式。在马克思看来,实现人自身的解放只有建立在资本主义私有制被消除、旧式分工被消灭的基础之上,届时人与人才能在全面深刻的社会变革的前提下相结合,形成“自由人联合体”即人的共同体。而人只有生活在共同体中,才能实现自由个性的全面发展;只有“在真正的共同体的条件下,各个人在自己的联合中并通过这种联合获得自己的自由”[3]199,人的自由全面发展的最高追求才会实现,人才能逐步走向自由自觉的美好生活,最后通达人的解放的终极状态。

式(1)中的常数项1 /EC1为宽频带反馈地震仪灵敏度,HHP(s)为描述宽频带反馈地震仪长周期频段频率特性的单位增益二阶高通滤波器传递函数,HLP(s)为描述高频段频率特性的单位增益二阶低通滤波器传递函数。

式(2)表明,闭环反馈后,自振周期T由反馈电路参数决定,与机械摆的参数无关,只与反馈电路中的电阻和电容有关。合理选择反馈电路中的电子元器件参数值,就可以确定地震仪的低频截至频率及地震仪的灵敏度。
基于模拟技术设计的传统地震仪一经研制,参数很难调整。引入数字反馈技术,这些参数可以通过CPU编程而改变,灵活配置地震仪的传递函数,改变周期和阻尼等。图8为本项目设计制作的井下甚宽频带地震仪反馈调理电路印制板(包括电容、电阻和积分器等)及电源、主控CPU、信号振动电路与弱信号拾取电路等。

图8 井下地震仪反馈调理电路印制电路板(PCB) Fig. 8 The printed circuit board (PCB) of feedback modulation circuit of downhole seimograph
3 井下定位定向系统
井下定位定向系统由井下部分、传输部分和地表部分组成。井下部分的姿态仪(罗盘、陀螺仪等)和井壁锁内置在密封腔体内,地表部分由ITU、井壁锁控制器和相应的软件组成(图9)。

图9 井下定位定向系统示意图Fig. 9 Illustration graph of downhole positioning and orientation system
3.1 姿态仪
早期的井底定向采用井底安装好一个基座,通过井下陀螺仪等方式对好基座的方位,然后将地震仪安装在此基座上。虽然此种定向方式存在读数误差和测量的不方便性,但对于0—300 m以内的观测井,也不失为一种可行的定向方案。对于300 m以上的观测井,目前采用集成在井下地震仪密封腔体中的电子罗盘进行定向(图10),定向误差小于5°。

图10 电子罗盘定向原理框图Fig. 10 Block graph of the principle of electronic compass orientation
本项目研制的井下光纤陀螺寻北仪系统结构如图11所示。光纤陀螺仪及其控制组件将安装在地震仪的底部,安装尺寸不大于Ф80 mm圆柱,平台旋转轴为圆柱体的轴心,光纤陀螺仪通过连接柱与转动平台连接。
真北角度的计算由总控模块(图11右)完成。总控模块与光纤模块(图12)的通讯可采用单向通讯,即光纤模块连续采集当前位置的光纤测量相位差值,并连续输出给总控模块。在总控模块中,根据当前安装位置的经纬度、转盘的倾角、当前转盘旋转位置、加速度测量值等参数,完成真北角的综合计算,并将结果输送至地表。

图11 井下光纤陀螺寻北仪结构与总控模块图Fig. 11 Components structure graph and illustration graph of general control module of downhole Fiber Optical Gyroscope (FOG)north finder

图12 井下光纤寻北仪通讯流程图Fig. 12 Flow chart of communication for downhole Fiber Optical Gyroscope (FOG) north finder
经中国赛宝实验室(第三方检测机构)对光纤陀螺仪进行测试,井底定向精度优于2°。性能指标达到了考核要求。
3.2 井壁锁
3.2.1 电路设计
3.2.1.1 使用减速电机驱动
根据机械设计的要求,减速电机的扭力要在2 N·m以上,而且要求超过电机最大力矩,电机必须堵转,且减速箱不会损坏。因此,选择了JGB37-520减速马达,供电24 V,转速12 rpm,最大力矩3.92 N·m。
3.2.1.2 自行搭建电机驱动电路
电机堵转电流高达0.4 A,因此,选用TI公司的全桥式直流电机驱动,最大5 A峰值,3.5 A RMS。这样足够的余量,保证驱动的长期稳定工作及后期的改进空间。图14为井锁电机驱动电路图。

图14 井锁电机驱动电路设计图Fig. 14 Design of motor drive circuit for borehole locker
3.2.1.3 具有到位检查功能
通过电位器耦合的方式,直接反应井锁的绝对位置状态,以此来判断井锁是否已经到位。加入简单的逻辑电路,转化为二值信号,直接控制电机驱动(图15)。

图15 井锁检测到位电路设计图Fig. 15 Design of position detecting circuit for borehole locker
3.2.1.4 具有到位指示功能
由电机驱动的IN1与IN2状态,判断电机是否在工作。电机工作时,会接通继电器U6,使得控制盒上的电机指示灯接通点亮,指示电机正在工作(图16)。
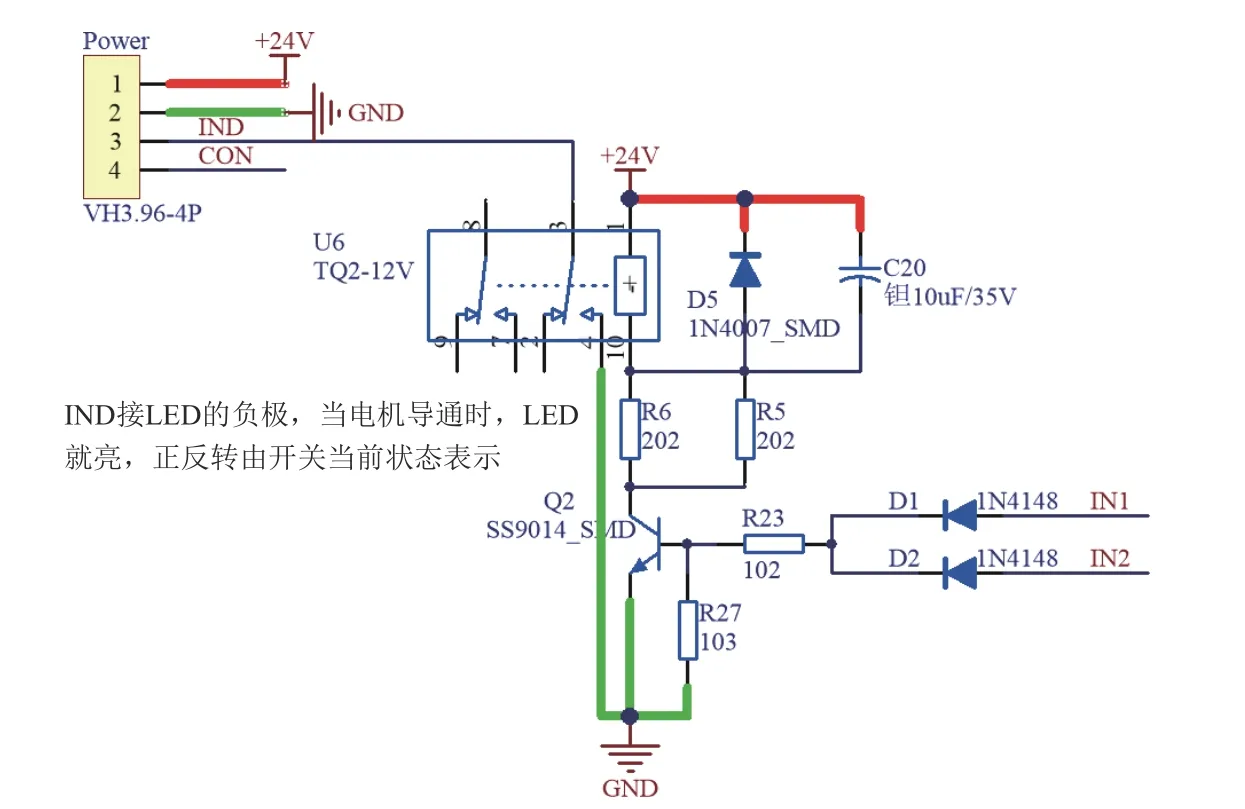
图16 井锁到位指示灯驱动电路设计图Fig. 16 Design of drive circuit for position indicator of borehole locker
3.2.2 机械结构
3.2.2.1 采用动密封结构
为了方便现场操作和设备动行的可靠性,对井锁的旋转控制部分采用密封罐和旋转轴动密封的方式进行密封处理。既简化了机械结构也方便了机械组装,同时提高了密封性(图17)。

图17 井壁锁机械结构图Fig. 17 Machinery structure of borehole locker
3.2.2.2 采用不锈钢丝杆和轴承
考虑到井锁是长期浸泡在水中,设计时采用了不锈钢的丝杆和轴承,提高了转动部件的抗腐蚀性。在丝杆的底部加装了一个不锈钢平面轴承,使丝杆的旋转更顺滑。
猜你喜欢
山东冶金(2022年2期)2022-08-08
现代机械(2022年3期)2022-07-11
纺织导报(2021年4期)2021-05-06
生活用纸(2021年1期)2021-01-09
幼儿教育·教育教学版(2020年8期)2020-12-23
幼儿教育·教育教学版(2020年8期)2020-12-23
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
运动(2016年7期)2016-12-01
火控雷达技术(2016年3期)2016-02-06