
美日城市中心型以公共交通为导向开发片区的土地利用及空间形态对比研究*
2022-07-27 03:26袁红姚强徐娜何媛
工业建筑 2022年4期
袁 红 姚 强 徐 娜 何 媛
(1.同济大学建筑与城市规划学院,上海 200092;2.西南交通大学建筑与设计学院,成都 611756)
TOD是一种强调城市紧凑性、土地利用高混合性,并且围绕城市公共交通站点进行城市开发的城市发展模式,不仅关注土地利用和城市交通,也高度重视城市的公共空间质量、步行环境质量和城市增长边界等方面[1]。众多研究与实践表明,TOD模式是提高大城市交通效率、土地经济性,促进城市精明增长和有序发展的重要推动力[2-3]。TOD在理论和实践发展过程中形成了3个典型特征(3D原则),即土地混合开发(Diversity)、高密度建设(Density)和宜人空间设计(Design)[4],后加入距离(Distance)和目的可达性(Destination Accessibility)扩展为“5D原则”[5]。因此,TOD开发模式极为关注城市中高度混合的土地利用、空间形态和交通系统。美国与日本两国分别为人口低密度国家和人口高密度国家的典型代表,也是当前全球TOD模式理论研究和实践应用的先驱。由于我国城市的人口密度、城乡发展水平、城市发展策略和层级结构各有差异,急需提出地域性、层级性的TOD发展模式。在国内外规划实践中,TOD规划结构呈现出多层次中心网络与多类型公交模式相结合的态势。城市中心型TOD作为高密度城市持续发展的解决策略之一,具有重要的研究意义。通过系统分析美日典型城市中心型TOD片区的土地利用和空间形态特征,有利于学习其成功经验,从而探索我国城市在同类TOD片区的发展策略。
本文以城市交通体系(公共交通及慢行交通)为切入点,从土地利用、空间形态两方面对比研究了美日城市中心型TOD片区的特征及异同。其中,土地利用方面选取的表征指标是土地利用性质和土地开发强度;城市空间形态方面选取的表征指标是公共空间分布、商业空间分布模式、道路空间整合度和路网密度;交通体系方面选取的表征指标是步行道路信息和公共交通站点核密度。文中所用基础数据来自Open Street Map,首先运用Google Earth及百度街景等网络工具对基础数据进行核对与修正;其次运用DepthMap软件对案例进行区域整合度(Integration R3)运算,得出相应的路网密度指标;随后运用ArcMap软件对基础数据进行修正,通过软件中的线密度、核密度工具对案例的路网密度指标和公共交通站点核密度指标进行运算;其他指标则是将基础数据进行核对与修正后,运用Arcmap或Arcscene分析得出。最终,运用arcgis、DepthMap等可视工具使各类数据得以视觉呈现。
1 美日TOD模式特征及其城市中心型TOD片区案例概述
1.1 美日TOD模式特征概述
1.1.1美国TOD模式
美国TOD模式的设计思想主要基于以下3个原则:第一,城市设置增长边界主要以城市公共交通的扩展为主,并且强调城市增长边界以内城市空间形态的紧凑;第二,强调城市土地利用的高混合度、步行空间的舒适性;第三,TOD城市设计中更多地关注街区尺度与公共空间的活力。TOD将更多的出行目的地布置在步行范围内,以便连接这些出行[6]。
美国城市的TOD开发政策有较强的系统性。由于TOD模式起源于美国,早在20世纪末美国城市就将TOD模式的相关原则与城市规划实践相结合。在TOD开发中各级政府的积极推动与美国国土区划体系直接相关,每个州之间相对独立,均需要制定符合本州的一系列政策。例如,自2006年以来纽约市先后颁布了《一个绿色繁荣的纽约》(2006—2031)规划报告、纽约州《国家智慧增长公共基础设施政策法》等政策法规,其中与TOD相关的内容包括“提升城市公共交通站点可达性”“注重城市土地的高效开发”“营造高活力的城市公共空间”“以TOD模式建设城市中心”等内容[7]。西雅图市则先后发起了“可持续西雅图”(1990)、“西雅图气候行动方案”(1997)、“西雅图动起来”(2015)等行动和政策,重点关注“绿色交通体系”(含“自行车交通设施”、“可持续绿色街道系统”等)[8-10]。同时,出于城市法规和民众意识,美国众多城市(如丹佛市、西雅图市)在进行TOD开发时较为关注公众参与,从目标确立、决策完成、项目建设、意见反馈到管理环节都是公众参与的结果。
1.1.2日本TOD模式
与美国截然不同,日本城市TOD项目的规划与发展政策具有高度一致性,对开发商的依赖度极高。民营铁路公司在日本城市TOD开发进程中起到了极大的促进作用,如东京市进行了平面层级的“土地区划调整工程”、立体层级的“市区再开发项目”等行动[11-12]。日本TOD模式主要依托商业模式进行开发。在20世纪前期,郊外开发与郊外铁路的一体化建设是当时各大民营铁路公司进行城市开发的主要手段。民营铁路公司通过将开发收益投资到铁路建设与运营中,使铁路运营效率得到了极大的提升,并反向促进其依托前期铁路项目建设城市中心枢纽站和大都市圈。政府公共部门也提供了较有力的支持政策,如对民营铁路公司颁发在人口密集地带进行垄断性经营的许可、在城市郊区大规模新建城镇交通工具[13-14]。日本因为国土资源有限,较为重视地下空间的利用,各个城市内大多都有专项的地下空间系统规划。例如,大阪市是日本首个对地下空间利用政策制定指导方案的城市,并成立了地下空间利用规划委员会;管理范围包括大阪地铁周边地区、难波-凑厅地区、长堀通周边地区3个区域[14],TOD建设同时涵盖了城区与郊区。
1.2 城市中心型TOD片区的层级定位
卡尔索普(1993)提出了两类TOD模式,一类是城市TOD,位于大型公共交通站点周边,站点周边的土地开发强度与开发密度都很高;第二类是邻里TOD,位于一般性的公共交通站点周边,站点周边的土地开发以居住功能为主,且有与居住区相配套的零售、娱乐、餐饮和其他服务性设施[6]。这一分类方式从城市公共交通网络和土地开发强度进行划分,但未清晰表达TOD与城市系统层级的对应关系,从而不利于对不同系统层级的TOD模式进行精细化设计。
本文参照美国丹佛市(City of Denver)TOD模式的研究报告《Transit-oriented development strategic plan TOD》[15],将城市TOD模式理解为一种涉及多种尺度的城市发展模式,并依据城市系统层级将其划分为城市层级、片区层级和街区层级三类(图1)。
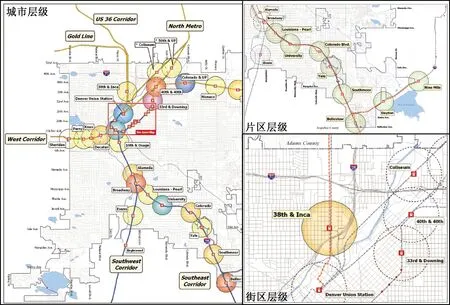
图1 TOD模式的三种层级[16]
1.2.1城市层级
城市层级TOD涵盖了整个城市范围内的公共交通与土地利用规划,其发展较为依赖于政府的相关激励政策和城市公共交通发展现状。城市层级TOD促使整个城市成为一个有机的复杂系统,以网络化的组团解决职住平衡问题。
1.2.2片区层级
片区层级TOD指由构成交通走廊的轨道站点沿线形成的功能多样且互相依存的城市片区。依托于有效整合的交通走廊,有效的TOD片区规划利于共享便捷的城市基础设施,并促进不同轨道站点之间的商业联动。本文根据城市片区层级TOD的所在区位,进一步将其细分为城市中心型TOD片区与城市郊区型TOD片区两类。对片区层级的研究范围为包含部分连续城市交通走廊轨道站点的500 m服务区的集合(图2)。但由于每条交通廊道各站点之间的距离多不一致,难以将研究范围进一步量化。

图2 城市TOD片区的研究范围示意
城市中心型TOD片区以城市中心公共交通站点为核心,围绕商业功能结合地上地下空间紧凑布置,商业、办公和娱乐功能布置在TOD片区中心,居住功能大多布置在外侧,具有明显的向心性。城市中心型TOD片区是城市周边郊区居民的通勤目的地,其交通方式包括混合区域性城市轨道交通(MRT)、快速公共交通系统(BRT)、高频公共汽车和社区巴士四种连接方式[17]。而城市郊区型TOD片区通常作为工作者通往城市中心的通勤换乘点或长期居住地,以多种站点与区域公共交通网络相连,混合区域性城市轨道交通(MRT)、快速公共交通系统(BRT)和高频地方公共汽车三种连接方式,是一种依托公共交通站点网络紧凑布置的郊区片区模式(表1)。

表1 城市中心型与城市郊区型TOD片区的特征对比
1.2.3街区层级
街区层级TOD主要依托轨道站点的地上地下一体化城市设计,在轨道站点周边半英里区域内实现城市功能的整合,并满足公共交通接入和自行车出行。街区层级TOD通常通过提高建筑密度、增加混合功能和改善街道连接性以实现对大规模公共交通资源的利用。
1.3 美日城市中心型TOD片区案例概述
本文选取研究案例的原则为:1)符合城市中心型TOD片区的定位;2)满足TOD模式发展过程的连贯性;3)其公共交通系统、土地利用和空间形态具有该国同类片区的典型特征。基于以上原则,选取美日城市中心型TOD片区的典型案例“美国弗吉尼亚州阿灵顿郡B-R廊道片区”“日本东京都市圈横滨市港未来片区”作为研究对象(表2)。

表2 美日典型城市中心型TOD片区的案例选取概况
1.3.1美国阿灵顿郡B-R廊道片区概况
阿灵顿(Arlington)郡隶属弗吉尼亚州,东邻华盛顿特区。华盛顿大都市区轨道地铁系统(Washington D.C.Metropolitan Area)沿线的城市建设被视为美国TOD模式的典范,曾在2005年获得了美国环境保护署颁发的“精明增长”奖项,阿灵顿郡地铁线路则是其城市轨道系统的重要分支。华盛顿大都市区共有红、黄、蓝、绿、橘五条地铁线,其中橘线(Orange Line)自东至西连接了华盛顿特区与阿灵顿郡。
阿灵顿B-R廊道片区(The R-B corridor of Arlington county)是橘线中穿越阿灵顿城市中心的轨道片区,包括巴尔斯顿(Ballston)、弗吉尼亚广场(Virginia Squar)、克拉伦登(Clarendon)、法院(Court House)、罗斯林(Rosslyn)5个站点(图3)。1980年至今,阿灵顿郡商业、办公等功能的建筑面积比进行TOD开发前(15 004 hm2)翻了一倍,居住单元的数量由5 700个激增至35 000个,其中超过3/4的面积增长位于阿灵顿B-R地铁沿线片区。阿灵顿郡内26%的人口、84%的城市商业、办公空间均集中于此,但该片区只占郡土地总面积的8%[19]。

图3 B-R廊道的站点示意[18]
美国阿灵顿B-R廊道片区在进行规划时即遵循了TOD开发理念,表现为以下3点:1)强调地铁站点周边的高强度土地开发;2)推动站点周边土地的功能复合;3)注重建设高质量的步行系统和空间环境[20]。
1.3.2日本横滨市港未来线片区概况
日本横滨市港未来线是横滨市城市中心区的核心轨道通廊,其沿线的公共交通、土地利用和空间形态均与TOD模式的核心理念相契合[21-22]。2004年初开通的横滨市港未来线,由横滨铁路交通中心站通往元町中华街,中途缓停的新高岛、港未来、马车道、日本大道站点均为横滨市著名的旅游景点或商业街区(图4)。该线路的开通使东京中心区涩谷站与横滨中华街联成一线,地铁直达仅需三十多分钟。本文选取港未来线中包括新高岛站、港未来站、马车道站、日本大道站和元町·中华街站5个站点区域,作为研究日本城市中心型TOD片区的样本。

图4 港未来线站点示意
2 美日城市中心型TOD片区的交通特征对比研究
2.1 慢行交通系统
以下道路数据来源于Open Street Map,借助Google地图和街景工具进行了错误纠偏,最终通过ArcMap进行视觉化呈现。通过对比美日两个片区内的道路信息可以发现(图5),其步行道路均较为系统,拥有较优的步行环境。但相比而言,B-R廊道片区内的步行道路网络保持了更好的联通性,为步行者到达某一地点提供了多种路径,同时也提升了城市道路空间的步行可达性。这一特征重点表现于弗吉尼亚广场站、卡拉伦登站与法院站3个站点周边区域。

a—美国B-R廊道片区从左至右依次为:巴尔斯顿站—弗吉尼亚广场站—克拉伦登站—法院站—罗斯林站;b—日本港未来线片区从左至右依次为:新高岛站—港未来站—马车道站—日本大道站—元町中华街站。
2.2 公共交通系统
以下公共交通站点数据来源于Open Street Map,借助Google地图和街景工具进行了错误纠偏,并通过ArcMap中的核密度工具进行计算,得出两个片区的公共交通站点核密度峰值与分析图。公共交通站点核密度反映了该地区公共交通设施的分布情况。
由图6对比可知,美国B-R廊道片区的公共交通核密度值略高于日本港未来线片区,其片区内的轨道交通与其他类型的城市公共交通接驳更好、协同性更优、设施更加完善。但日本港未来线片区内的公共交通站点核密度值分布更为均匀,大部分集中在20左右,且该片区明显呈现出站点聚集效应,即站点周边500 m范围内的核密度值均较高(25左右)。B-R廊道片区内5个公共交通站点区域的核密度值差异较大,其中以罗斯林站点区的核密度最高(32左右),巴尔斯顿站点区核密度值其次(22左右),法院站、克拉伦登站、弗吉尼亚站3个站点周边的核密度最低(15左右)。由此可知,美日城市中心片区公共交通站点核密度相差不大,但日本城市中心片区内公共交通站点核密度分布更为均匀。
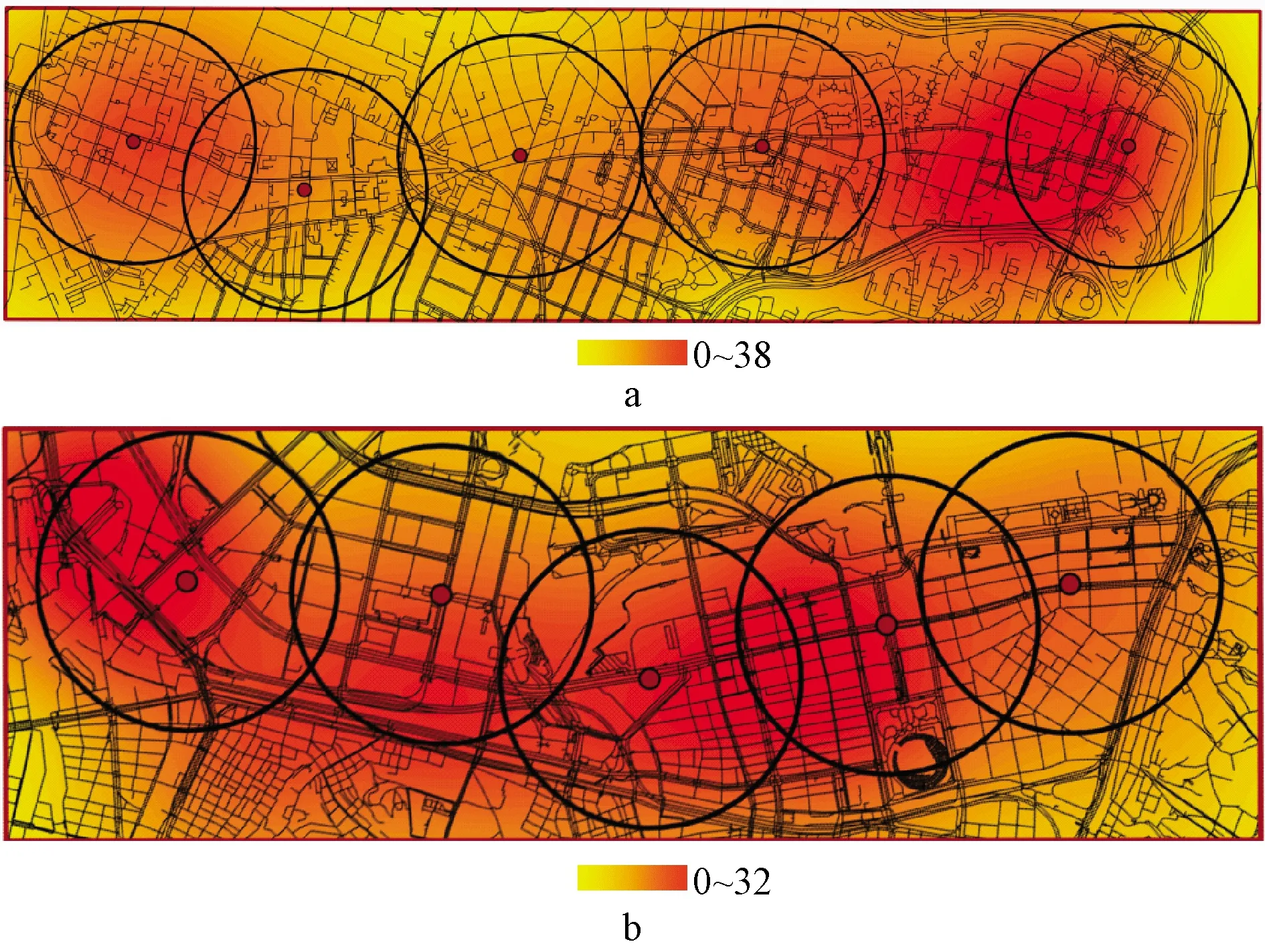
a—公共交通站点核密度峰值:38,美国B-R廊道片区从左至右依次为:巴尔斯顿站—弗吉尼亚广场站—克拉伦登站—法院站—罗斯林站;b—公共交通站点核密度峰值:32,日本港未来线片区从左至右依次为:新高岛站—港未来站—马车道站—日本大道站—元町中华街站。
3 美日城市中心型TOD片区的土地利用特征对比研究
3.1 用地性质分析
图7中的数据来自Open Street Map,借助Google地图和街景工具进行了错误纠偏,最终通过ArcMap得以视觉化呈现。通过对比两个片区内的土地利用现状可知,两个片区在轨道站点500 m范围内的土地利用均以商业、办公类用地比例为最高,但美国B-R廊道片区站点500 m范围内呈现更高的功能混合性,不仅有商业、办公类用地,还有部分住宅用地,使其形成了集商业、办公、住宅为一体的土地开发模式。
a—美国B-R廊道片区从左至右依次为:巴尔斯顿站—弗吉尼亚广场站—克拉伦登站—法院站—罗斯林站;b—日本港未来线片区从左至右依次为:新高岛站—港未来站—马车道站—日本大道站—元町中华街站。
由图7可以发现,罗斯林站侧重于高密度的商业和居住的土地使用,法院站侧重于政府机构的土地使用,克拉伦登站侧重于餐饮业和零售业的开发,弗吉尼亚广场站侧重于教育机构土地使用,波尔斯顿站侧重于高密度的零售业开发。通过对5个站点的土地利用现状分析可知,B-R廊道片区交通走廊沿线较好地实现了各种土地使用类型的平衡和混合。
3.2 商业开发强度分析
图8中建筑数据来源于Open Street Map,借助Google地图和街景工具进行了错误纠偏,最终通过ArcGIS得以视觉化呈现。由图8可知,两个案例的商业开发强度均较高,但具有不同的特点。
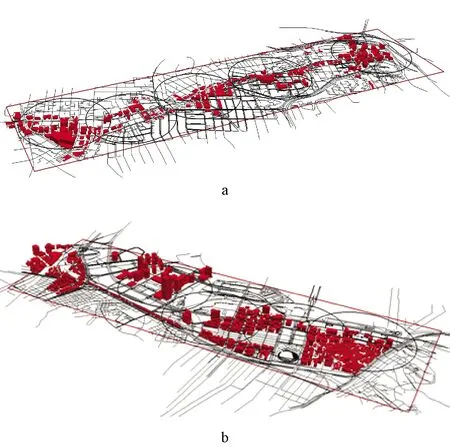
a—美国B-R廊道片区从左至右依次为:巴尔斯顿站—弗吉尼亚广场站—克拉伦登站—法院站—罗斯林站;b—日本港未来线片区从左至右依次为:新高岛站—港未来站—马车道站—日本大道站—元町中华街站。
日本港未来线片区的商业开发总量要高于美国B-R廊道片区。日本港未来线片区的新高岛和港未来站点周边的商业开发强度最高,商业地块用地容积率高达6~10左右。马车道站周边的商业开发强度次之,周边商业地块用地容积率大部分集中在4~5左右;元町中华街站点周边的商业开发主要以零售商业为主,商业用地容积率大部分集中在2~3左右。
美国B-R廊道片区内离地铁站点沿线较近的是以商业办公为主的高密度区,外围是以居住为主的低密度区。站点周边用地的容积率一般控制在2.5~4.8,一些毗邻站点的用地容积率更高达6~10。
4 美日城市中心型TOD片区的空间形态特征对比研究
4.1 城市道路空间与轨道交通入口空间的契合度分析
空间整合度可体现出空间序列等级结构,是评判空间体系的重要标准。其中,全局整合度与局域整合度的差别为:前者计算每条线到其他所有线的拓扑深度,而后者仅仅计算与每条线距离3个拓扑距离的线的平均深度。全局整合度可以反映出全城的商业中心;局域整合度可以避免边界作用的影响,从而反映出商业次中心。整合度高则拓扑连接性较好、可供更多的人流穿过,同时在城市中可见度较高、商业潜力较好。本文运用空间句法对两个片区样本进行道路空间的整合度分析,为了避免边界作用的影响,采用了局域整合度和平均深度作为衡量站域道路空间整合度的具体指标。
通过图9对比可发现,美国B-R廊道片区内城市道路空间的高整合度区域与轨道交通入口空间基本契合,出入口设置区域为整合度较高的城市空间。日本港未来线片区内城市道路空间的高整合度区域与轨道交通入口空间契合度相对较低,该片区内城市道路空间的高整合度主要分布在片区内商业地块附近与城市主干道附近。
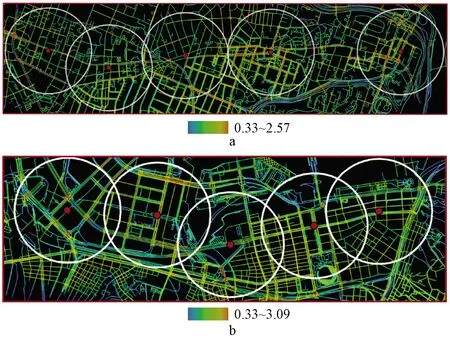
a—美国B-R廊道片区从左至右依次为:巴尔斯顿站—弗吉尼亚广场站—克拉伦登站—法院站—罗斯林站;b—日本港未来线片区从左至右依次为:新高岛站—港未来站—马车道站—日本大道站—元町中华街站。
由Depthmap的运算结果可知(表3、图10),港未来线片区的Integration R3值整体上略高于B-R廊道片区,但两个片区的R3值均主要分布在0.88~2.26范围,且分布较为平均。整体而言,两个片区内的场所活力和道路空间的可达性相差不大,评价值均为较好。

表3 美日典型城市中心型TOD片区的R3值

a—美国B-R廊道片区的R3值分布;b—日本港未来线片区的R3分布。
4.2 公共空间分析
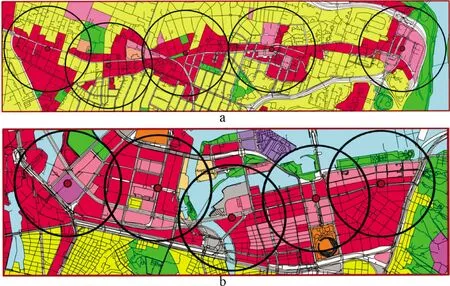
以下公共空间数据来源于Open Street Map,借助Google地图和街景工具进行了错误纠偏,最终通过ArcGIS得以视觉化呈现。图11中表达的公共空间主要指公园或大块绿地,不包括空地、水域及住宅区内的半开敞空间。通过对两个片区的公共空间分布对比发现,首先,两者间的公共空间占比相差不大。港未来线片区因为临近海边,故开放空间占比比B-R廊道片区更高。其次,B-R廊道片区的公共空间分布相对分散,港未来线片区内的公共空间分布更加集中。B-R廊道片区的主要公共空间为阿灵顿门户公园与昆西公园,其余的零散公共空间更多分布在各个住宅区内,直接服务于社区。港未来线片区的公共空间主要集中分布于东侧沿海区,同时也有元町公园与鸭山公园直接为周边住宅区服务。由此可知,美国城市中心型片区的公共空间分布较分散,日本城市中心型片区的公共空间分布则相对集中。
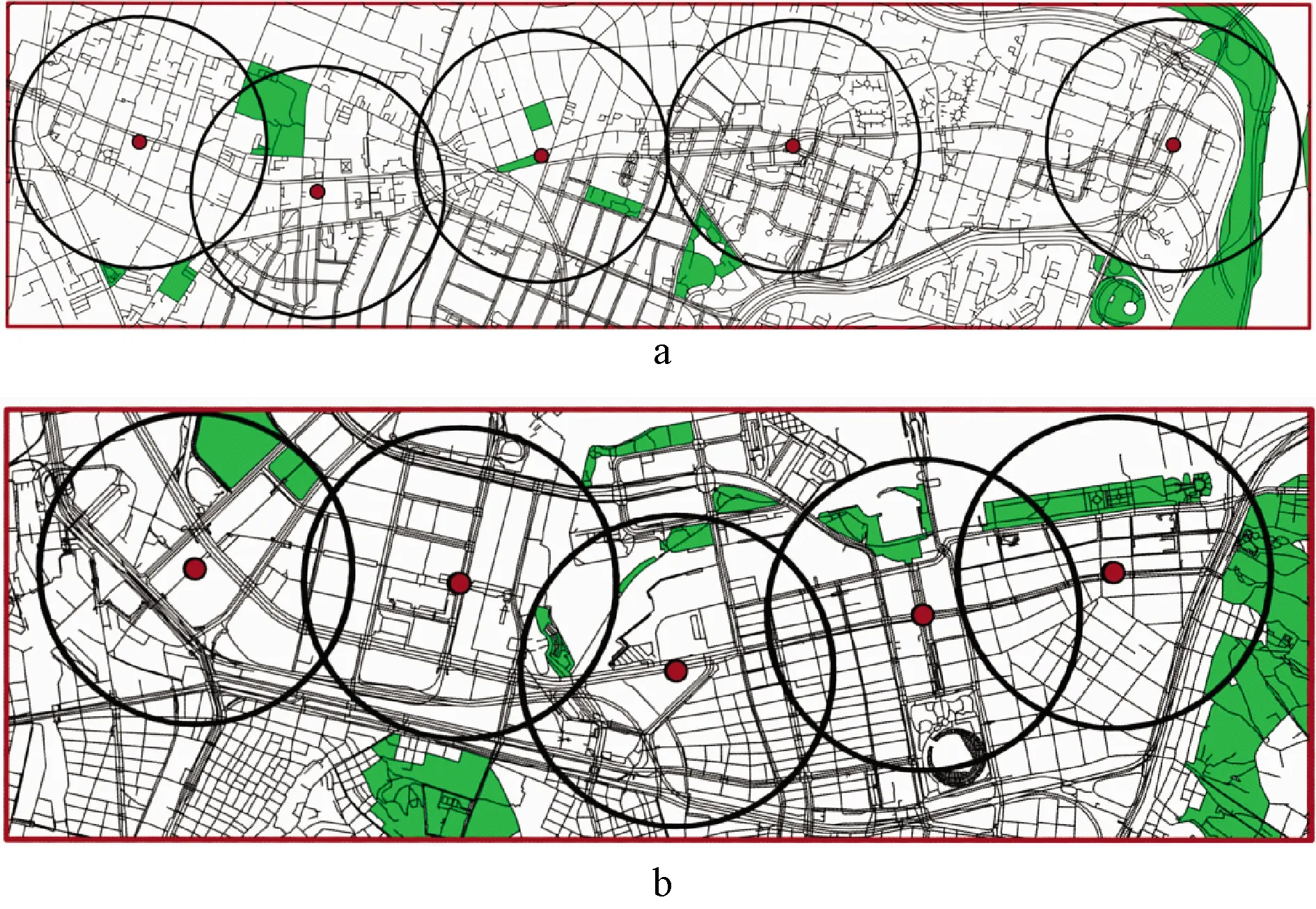
a—美国B-R廊道片区从左至右依次为:巴尔斯顿站—弗吉尼亚广场站—克拉伦登站—法院站—罗斯林站;b—日本港未来线片区从左至右依次为:新高岛站—港未来站—马车道站—日本大道站—元町中华街站。
4.3 商业布局分析
以下公共空间数据来源于Open Street Map,借助Google地图和街景工具进行了错误纠偏,最终通过ArcGIS得以视觉化呈现。如图12所示,美国B-R廊道片区的商业功能主要分布在轨道线网附近,呈现沿城市街道分布的现象。日本港未来线片区的商业功能主要围绕站点周边进行开发,呈现距离站点越近、商业布局越集中的态势,此外沿着城市主要道路也有一定规模的商业开发。

a—美国B-R廊道片区从左至右依次为:巴尔斯顿站—弗吉尼亚广场站—克拉伦登站—法院站—罗斯林站;b—日本港未来线片区从左至右依次为:新高岛站—港未来站—马车道站—日本大道站—元町中华街站。
4.4 路网密度分析
图13中的道路数据来源于Open Street Map,借助Google地图和街景工具纠错,并通过ArcMap中的线密度工具进行计算,得出四个站域的路网密度峰值与分析图。路网密度反映了该地区路网的状况以及街区尺度。

a—路网密度峰值:52,a美国B-R廊道片区从左至右依次为:巴尔斯顿站—弗吉尼亚广场站—克拉伦登站—法院站—罗斯林站;b—路网密度峰值:60,日本港未来线片区从左至右依次为:新高岛站—港未来站—马车道站—日本大道站—元町中华街站。
通过对比两个片区内的路网密度值分布可以发现,首先,日本港未来线片区的路网密度峰值稍高于美国B-R廊道片区,但街区尺度小于后者。港未来线片区的路网密度峰值较高与其延续了传统的小街区尺度有一定的相关性。其次,日本港未来线片区内的路网密度值分布较为均匀,大部分集中在35~45之间;而美国B-R廊道片区内的路网密度并不均匀,峰值出现在法院站周边(45左右),而巴尔斯顿站周边的路网密度则很小(20左右)。由此可知,日本城市中心型片区的路网密度较高,而美国城市中心型片区路网密度在各站点区域差异较大。
5 结论与启示
5.1 结 论
根据所在城市区位,本文将美国和日本的典型TOD片区划分为城市中心型与城市郊区型两类,随后从交通体系(慢行交通与公共交通)、土地利用与空间形态3个层面对比分析了美国片区和日本片区的异同点。
1)本文研究发现,美日城市中心型TOD片区的步行道路均较为系统,两者各类公共交通的协同性均较强但具有较大差异,主要表现为3点:
a.在公共交通体系方面,美国城市中心型TOD片区的公共交通系统呈现为局部密集态势;日本城市中心型TOD片区的公共交通系统的密度更为均衡。两者的步行道路系统可达性均较高,与公共交通之间的协同性均较好。
b.在土地利用特征方面,美国城市中心型TOD片区的功能混合性较高;日本城市中心型TOD片区则以商业、办公类功能为主,且两者的商业开发强度均较高。
c.在城市空间形态方面,两者具有较大差异。首先,美国城市中心型TOD片区的高整度区域与入口空间契合度较高,日本则契合度较低;其次,对于城市公共空间分布,呈现美国城市中心型TOD片区较分散,与住宅区功能的结合更为紧密;日本城市中心型TOD片区的公共空间分布较为集中,且与住宅、商业、办公都有一定程度的结合;第三,在商业布局方面,日本城市中心型TOD片区的商业布局主要沿着城市轨道线网展开,美国城市中心型TOD片区商业布局则主要围绕公共交通站点、沿街道展开。
2)在美日两国不同公共交通体系、土地利用形式和城市空间形态发展策略的影响下,其城市中心型TOD片区在发展过程中逐渐形成了较为明显的差异特征,其主要原因如下:
a.在交通体系方面,由于美日两国大型城市的城市化进程较快,其主要公共交通网络形成和TOD开发的时间也较早。由于美国城市的城市化时间更早,公共交通发展的历程更加完善。相对而言,日本大型城市的公共交通使用效率、运营效率与运营效率更高,其主要因素则是日本国土面积小、城市人口密度高(如东京市),这一现象也与日本国民乘坐公共交通意识的普及率较高有一定的关联。
在城市片区层面,城市中心型TOD片区的区位优势导致了片区内公共交通设施较多,表现为美日案例样本中公共交通站点之间的协同性均较强。但美国城市的郊区化现象比日本城市更为明显,因此日本城市中心型TOD片区的人口密集度更高,公共交通站点的分布也更加均匀。
b.在土地利用方面,美日大型城市的空间结构决定了两个国家的城市土地利用呈现明显的聚集效应,即核心城区内的土地开发强度高,其他区域的土地开发强度则相对较弱。如前文所述,日本大型城市轨道交通线网的系统性更强,整个城区内的交通可达性相对均匀,所以日本大型城市的土地开发强度相对美国同类城市的强弱差异性较小。
在城市片区层面,首先,城市中心型片区大多为城市核心地带,所以美日案例样本中的商业开发强度都较高。其次,日本城市中心型的人口密集度相对更高,导致其片区土地利用形式以商业办公用地为主,辅以住宅用地;第三,美国城市整体的人口密度一般都不会太高,因此城市中心同样会有较高比例的住宅用地,片区通常会进行商业、办公、住宅一体化开发,使其功能混合性较高。
c.在空间形态方面,现代主义城市规划思想贯穿了美国大、中型城市的建设全过程,导致美国TOD模式下的城市空间形态呈现出较大的街区尺度态势;美国在二战前对小汽车的极度依赖则使得城市中的静态交通空间占比较高且分布均匀。由于日本城市内存在大量的传统街区,城市街区尺度相对较小。
在城市片区层面,首先,美国城市中心型TOD片区内各类型公共交通之间的协同性更高,公共交通站点的分布更集中,因此城市道路空间的高整合度区域与轨道交通入口空间的契合度很高。日本城市中心型TOD片区公共交通站点的分布则相对集中,城市道路空间的高整合度主要分布在片区内商业地块附近与城市主干道附近。其次,美国城市中心型TOD片区内的商业分布大体沿轨道沿线展开,而日本城市中心型TOD片区主要围绕公共交通站点周边进行开发,且距离站点越近开发强度越高。第三,日本城市中心型片区的路网密度较高,美国城市中心型片区的路网密度在各站点周边差异较大。
5.2 启 示
TOD模式的产生最初是为了解决美国城市低密度蔓延的问题[23]。相对于美国逆城市化的低密度城市蔓延,日本面临的是以城市为中心的高密度蔓延,所以日本TOD模式开发策略更需要解决的问题是如何实现城市核心化。当前我国一线、新一线城市与日本城市面临着相同或相似的问题,城市整体呈现高密度蔓延的趋势;而部分城市也面临着与美国城市同样的问题,城市整体呈现低密度蔓延的趋势。从这个角度来看,无论是日本还是美国,其TOD的开发模式都可为我国未来的城市化进程提供重要的参照。
仇保兴指出,TOD模式对于建设宜居型生态城市有着重要意义,“这种模式在中国和其他发展中国家是可以推广、可借鉴的”[24]。我国TOD发展不仅仅是城市转型发展的重要方面,也是世界低碳发展的重要内容。现阶段在我国大城市高度集聚、立体发展及国家/地方政策的基础上,系统地研究美国、日本两国城市中心型TOD片区的交通系统、土地利用、空间形态特征及其深层动因,可为我国探索城市中心型TOD开发模式的理论研究及实践方法提供思路。由于TOD开发模式是一个复杂的系统性问题,与城市社会、经济、文化、规划等众多方面息息相关。本文作为对城市中心型TOD片区层级“面的研究”,主要基于典型案例对其进行初步的定量与定性分析,愿抛砖引玉,以期后来者加入。
猜你喜欢
社会科学战线(2022年6期)2022-08-25
廉政瞭望·下半月(2022年5期)2022-06-11
中国典型病例大全(2022年13期)2022-05-10
中华养生保健(2021年18期)2021-02-13
西部交通科技(2021年9期)2021-01-11
资源导刊(2020年5期)2020-06-12
廉政瞭望(2019年5期)2019-06-10
大科技·百科新说(2018年2期)2018-03-19
学习导刊(2017年8期)2017-11-02
科学家(2017年1期)2017-04-11
