
一类复矩阵方程的双结构解及最佳逼近
2022-07-22 14:30:26黄敬频
重庆理工大学学报(自然科学) 2022年6期
黄敬频,徐 云
(广西民族大学 数学与物理学院, 南宁 530006)
0 引言
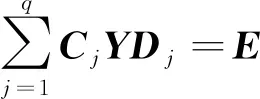
在复数域上讨论方程
(1)
具有三对角-箭形同元双结构解(X,Y)及其最佳逼近问题。

定义1复数域C上2个n级矩阵:
(2)

三对角矩阵在船体数学放样中3次样条插值函数的建立,以及微分方程边值问题的求解等方面有重要应用。箭形矩阵来源于孤立分子的无辐射跃迁与费米液体的耦合问题,它可作为非线性调节控制系统中的参数矩阵,也可用来描述星形弹簧质量系统的振动问题。提出并具体讨论如下2个问题:
1 问题1的解

w=(x1,…,xn,y1,…,yn-1,z1,…,zn-1)T∈C3n-2
(3)
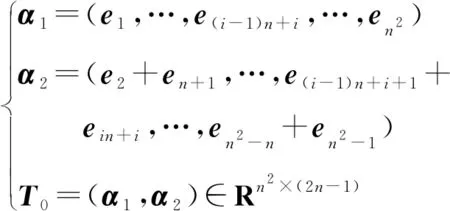
引理1设X是形如式(2)的三对角矩阵,ei为单位矩阵In2的第i列,构造一个列正交矩阵T如下:
(4)
则vec(X)=Tw, 其中w,T见式(3)(4)所示。
证明根据定义1和矩阵(4)的构造方法可得
vec(X)=x1e1+…+xie(i-1)n+i+…+xnen2+
y1e2+…+yie(i-1)n+i+1+…+yn-1en2-n+
z1en+1+…+ziein+i+…+zn-1en2-1=
(e1,…,e(i-1)n+i,…,en2)(x1,…,xn)T+
(e2,…,e(i-1)n+i+1,…,en2-n)(y1,…,yn-1)T+
(en+1,…,ein+i,…,en2-1)(z1,…,zn-1)T=
α1(x1,…,xn)T+α2(y1,…,yn-1)T+
α3(z1,…,zn-1)T=(α1,α2,α3)w=Tw
因此引理1关于vec(X)的表达式成立。证毕。
引理2设Y是形如式(2)的箭形矩阵,ei为单位矩阵In2的第i列,构造一个列正交矩阵U:
(5)
则vec(Y)=Uw,其中w,U如式(3)(5)所示。
证明根据定义1和矩阵(5)的构造方法可得
vec(Y)=x1e1+…+xie(i-1)n+i+…+xnen2+
y1e2+…+yiei+1+…+yn-1en+
z1en+1+…+ziein+1+…+zn-1en2-n+1=
(e1,…,e(i-1)n+i,…,en2)(x1,…,xn)T+
(e2,…,ei+1,…,en)(y1,…,yn-1)T+
(en+1,…,ein+1,…,en2-n+1)(z1,…,zn-1)T=
β1(x1,…,xn)T+β2(y1,…,yn-1)T+
β3(z1,…,zn-1)T=(β1,β2,β3)w=Uw
所以引理2关于vec(Y)的表达式成立。证毕。
引理3[3]复矩阵方程AX=B有解的充要条件是AA+B=B。有解时,它的一般解和最小二乘解均可表示为:X=A+B+(I-A+A)V, 其中V是适当阶数的任意矩阵。
引入记号
v=vec(E)
则矩阵方程(1)等价于
F·vec(X)+G·vec(Y)=v
(6)
如果(1)存在解(X,Y)∈TAn,则由引理1和引理2得
vec(X)=Tw,vec(Y)=Uw
其中w、T、U分别如式(3)(4)(5)所示。把vec(X)和vec(Y)代入式(6)得
(FT+GU)w=v
(7)
这里FT+GU∈Cml×(3n-2),v∈Cml。设FT+GU的奇异值分解为
(8)
∑r=diag(σ1,…,σr)>0,P∈Uml×ml,Q∈U(3n-2)×(3n-2)是酉矩阵。令
(9)
其中vr,wr∈Cr,v3n-2-r,w3n-2-r∈C3n-2-r。于是关于问题1的解,有如下结果:
定理1给定Ai,Cj∈Cm×n,Bi,Dj∈Cn×l(i=1,…,q),E∈Cm×l,并设(7)中FT+GU的奇异值分解为式(8),则方程(1)存在解(X,Y)∈TAn的充要条件是分解式(9)中向量vr=∑rwr,v3n-2-r=0。有解时,它的一般解表达式为
(10)
其中∑r,Q,vr由分解式(8)(9)给出,w3n-2-r∈C3n-2-r是任意向量,解(X,Y)由w唯一确定。
证明方程(1)存在解(X,Y)∈TAn等价于方程(7)关于w有解。又由式(7)(8)(9)可得
因此有vr=∑rwr,v3n-2-r=0。 再由式(9)可得
于是式(1)有解(X,Y)∈TAn的充要条件是vr=∑rwr,v3n-2-r=0,且其通解为(10)。证毕。
在方程(1)中取Cj=0(j=1,…,q)或Ai=0(i=1,…,p),并由方程组(7)及引理3可得以下2个推论。

wt=(FT)+v+(I3n-2-(FT)+FT)γt
其中γt∈C3n-2是任意向量,解X由wt所确定。
wa=(GU)+v+(I3n-2-(GU)+GU)γa
其中γa∈C3n-2是任意向量,解Y由wa所确定。
下面讨论方程(1)在HTAn中的解。先对复矩阵Ai,Cj,Bi,Dj(i=1,…,p;j=1,…,q),E及X,Y作实分解为:
Ai=Ai0+Ai1I,Cj=Cj0+Cj1I
Bi=Bi0+Bi1I,Dj=Dj0+Dj1I
E=E0+E1I,X=X0+X1I,Y=Y0+Y1I

(11)
引入记号
(12)
则方程组(11)等价于
(13)
当(X,Y)∈HTAn时,由X=X*,Y=Y*可得
因此(X0,Y0)及(X1,Y1)分别由下列2个实向量唯一确定

(14)
类似于引理1和引理2的方法,设ei为单位矩阵In2的第i列,构造矩阵T0、U0、T1、U1:
(15)
(16)
T1=(en+1-e2,…,ein+i-e(i-1)n+i+1,…,
en2-1-en2-n)
(17)
U1=(en+1-e2,…,ein+1-ei+1,…,
en2-n+1-en)
(18)
其中T1,U1∈Rn2×(n-1)。于是有
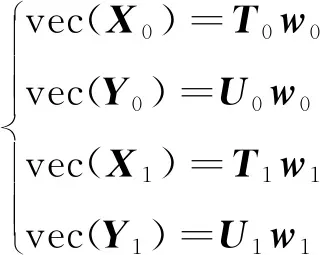
(19)
将式(19)代入式(13)整理得
Hwh=vh
(20)
其中
于是关于方程(1)在HTAn中的解,有如下结果:
定理2给定Ai,Cj∈Cm×n,Bi,Dj∈Cn×l(i=1,…,p;j=1,…,q),E∈Cm×l,则方程(1)存在Hermite三对角-箭形同元双结构解(X,Y)∈HTAn的充要条件是
HH+vh=vh
(21)
有解时,它的一般解表达式为
wh=H+vh+(I3n-2-H+H)γh
(22)
其中γh∈R3n-2是任意向量,解X、Y由wh所确定。
证明方程(1)存在解(X,Y)∈HTAn等价于方程(20)关于wh有解,于是根据引理3可知(1)存在解(X,Y)∈HTAn的充要条件是式(21)成立,且其通解由式(22)给出。证毕。
根据定理2的结果,容易得到以下推论3和推论4。

有解时,它的一般解表达式为
其中γht∈R3n-2是任意向量,解X由wht所确定。
有解时,它的一般解表达式为
其中γha∈R3n-2是任意向量,解Y由wha所确定。
2 问题2的解
假定方程(1)存在解(X,Y)∈TAn,即定理1中解集w非空。对于给定的三对角矩阵M和箭形矩阵N,设它们对应的3n-2维向量为

(23)
并对向量Ql(M)和Ql(N)分解如下
(24)
这里Q∈U(3n-2)×(3n-2)是由式(8)给出的酉矩阵。于是关于问题2的解,有如下结果:

(25)
证明根据矩阵(X,Y)的向量化表示式(3)及定理1可得


其中w3n-2-r∈C3n-2-r是待定向量,因此有

当且仅当
(26)
利用Frobenius范数定义及二元函数极值方法,容易求得式(26)关于w3n-2-r具有唯一解
(27)
把式(27)代入式(10)即得表达式(25)。证毕。
3 数值算例
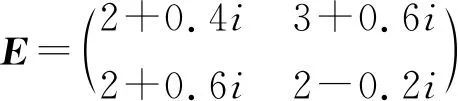
给定矩阵A,C∈C2×4,B,D∈C4×2,E∈C2×2,试用本文方法判断方程AXB+CYD=E是否存在解(X,Y)∈TA4或(X,Y)∈HTA4。

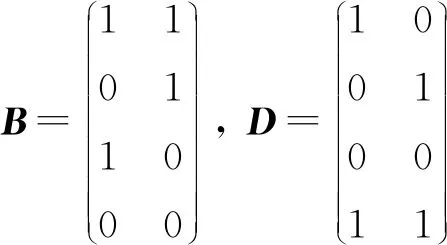
判断是否存在解(X,Y)∈TA4。根据引理1和引理2及(7)写出T,U,F,G,v如下:
T=(e1,e6,e11,e16,e2,e7,e12,e5,e10,e15)
U=(e1,e6,e11,e16,e2,e3,e4,e5,e9,e13)


v=vec(E)
其中ei为单位矩阵I16的第i列。直接计算可得
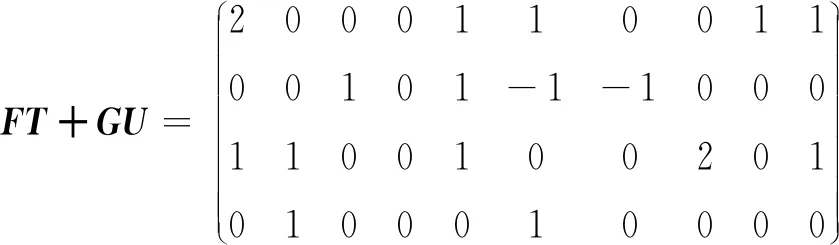
(FT+GU)(FT+GU)+v=v
因此,根据定理1知,方程AXB+CYD=E存在三对角-箭形双结构解(X,Y)∈TA4且由式(10)确定。
判断是否存在解(X,Y)∈HTA4。先按方程(20)写出H,vh。由于
P1=BT⊗A,P2=0,Q1=DT⊗C,Q2=0
E=E0+E1I
T0=(e1,e6,e11,e16,e2+e5,e7+e10,e12+e15)
U0=(e1,e6,e11,e16,e2+e5,e3+e9,e4+e13)
T1=(e5-e2,e10-e7,e15-e12)
U1=(e5-e2,e9-e3,e13-e4)
于是
vh=(2,2,3,2,0.4,0.6,0.6,-0.2)T∈R8
直接计算可得HH+vh=vh,因此根据定理2可知,方程AXB+CYD=E存在解(X,Y)∈HTA4且由式(22)确定。下面给出其中1组解
4 结论
复系统(1)是一类涵盖Sylvester方程和Lyapunov方程,具有广泛实际背景的矩阵方程,本文研究了它的三对角-箭形同元双结构解及最佳逼近问题。针对问题1,主要利用三对角矩阵和箭形矩阵的结构特点,给出它们的向量化刻划,获得原方程在TAn和HTAn中有解的充要条件及其解表达式。针对问题2,利用结构矩阵的向量化技巧及Frobenius范数酉矩阵乘积不变性,在问题1解集Ω≠∅条件下,获得问题2的最佳逼近解。数值算例验证了本文结果的正确性。
猜你喜欢
中等数学(2022年6期)2022-08-29 06:15:08
数学物理学报(2020年2期)2020-06-02 11:29:10
安顺学院学报(2020年1期)2020-04-05 10:57:20
校园英语·上旬(2019年6期)2019-10-09 04:08:57
现代计算机(2019年6期)2019-04-08 00:46:50
数学年刊A辑(中文版)(2018年4期)2019-01-08 02:00:24
中学生数理化·七年级数学人教版(2017年6期)2017-11-09 02:45:57
新疆大学学报(自然科学版)(中英文)(2014年3期)2014-11-02 07:52:38
商(2012年11期)2012-07-09 19:07:55
文山学院学报(2012年6期)2012-03-25 13:07:52
