面向竖井掘进机的超宽带分层平面定位系统设计与应用
2022-07-21 03:53:18齐保卫孟帅尧李东利王付利
隧道建设(中英文) 2022年6期
齐保卫, 孟帅尧, 李东利, *, 王付利, 刘 闯
(1. 中铁工程装备集团技术服务有限公司, 河南 郑州 450016; 2. 中铁工程装备集团有限公司, 河南 郑州 450016)
0 引言
竖井是矿藏开采、水利水电、国防建设、交通隧道等地下工程的重要组成部分[1],其常用的修建方法有普通凿井法和钻井法[2-3]。2021年,世界首台全断面硬岩竖井掘进机成功运用于浙江宁海抽水蓄能电站排风竖井项目。竖井掘进机是将全断面岩石隧道掘进机(TBM)设计理论引入竖井施工,能够一次完成竖井隧洞开挖、支护、出渣等功能的大型竖井施工装备。由于竖井掘进机工序复杂、工作环境恶劣、安全管理难度大[4],随着行业技术的进步,安全高效的建设竖井是目前重要的研究方向。
为保障工人施工安全,实现安全预警和人员管理,管理方需借助定位系统实时获取作业人员的位置。目前,针对竖井施工定位的研究较少,且仅有针对井底平面的人员定位。刘志强[5]对竖井掘进机凿井技术及工艺进行了介绍,并对掘进设备进行了论述;贾文浩等[6]提出一种利用iGPS技术,通过安装在掘进机上的激光接收器,实现煤巷中的掘进机定位;彭学军[7]通过对比几种常见的室内定位技术,设计出基于UWB技术的隧道高精度定位系统;符世琛等[8]设计出一种基于UWB技术的悬臂掘进机位姿检测及其位姿精度分析方法;成龙等[9]通过Chan算法对超宽带检测基站布局方式及精度进行仿真分析,研究不同布局方式对定位精度的影响。
然而,对于竖井掘进机设备中的人员定位,至今尚未形成一套成熟的定位方法,其最大的难点就是设备结构对超宽带信号的干扰问题。本文结合自研定位方法与现场实施案例,对上述定位技术难点进行研究,设计出一种适用于竖井掘进机的超宽带分层平面定位系统,并对定位精度进行检测。
1 系统应用背景介绍
1.1 竖井掘进机介绍
以传统竖井施工技术为基础,结合隧道掘进机、物料垂直提升等技术研发的深井掘进设备——全断面竖井掘进机,其结构如图1所示。
竖井掘进机采用刀盘破岩;稳定系统稳定刀盘,降低刀盘震动;推进系统提供主机掘进推力;撑靴通过撑紧井壁承受刀盘工作时的反向力;排渣系统将破碎岩土排出设备;设备平层放置液压泵站、电气柜等掘进机后配套设备[10]。竖井掘进机主要定位区域选择作业人员活动区域,主要集中在设备平层、稳定器等平台。
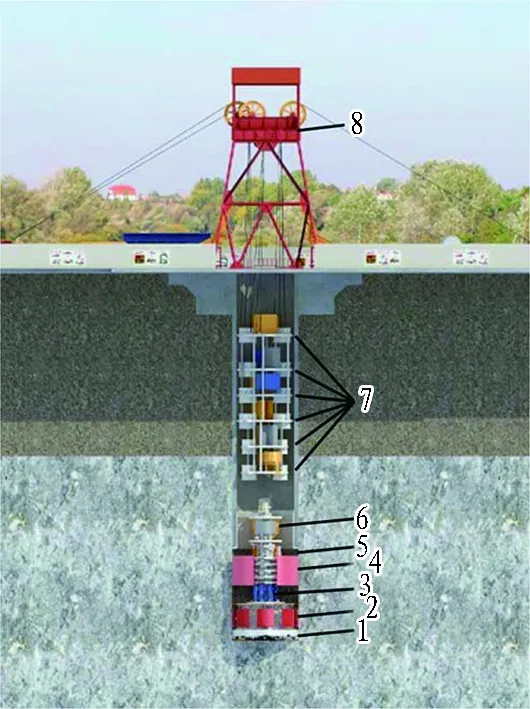
1—刀盘; 2—稳定系统; 3—主驱动; 4—撑靴; 5—推进系统; 6—排渣系统; 7—设备平层; 8—井架。
1.2 UWB定位技术
UWB是一种非正弦无线电信号,是一种相对带宽必须大于0.2、绝对带宽大于500 MHz的超宽带定位技术[11]。它基于飞行时间精准测距定位,采用TOA或TDOA等定位算法,具有实时性强、精度高、稳定性好等特点,目前广泛应用于工业级高精度定位领域。UWB系统定位技术分类如图2所示。
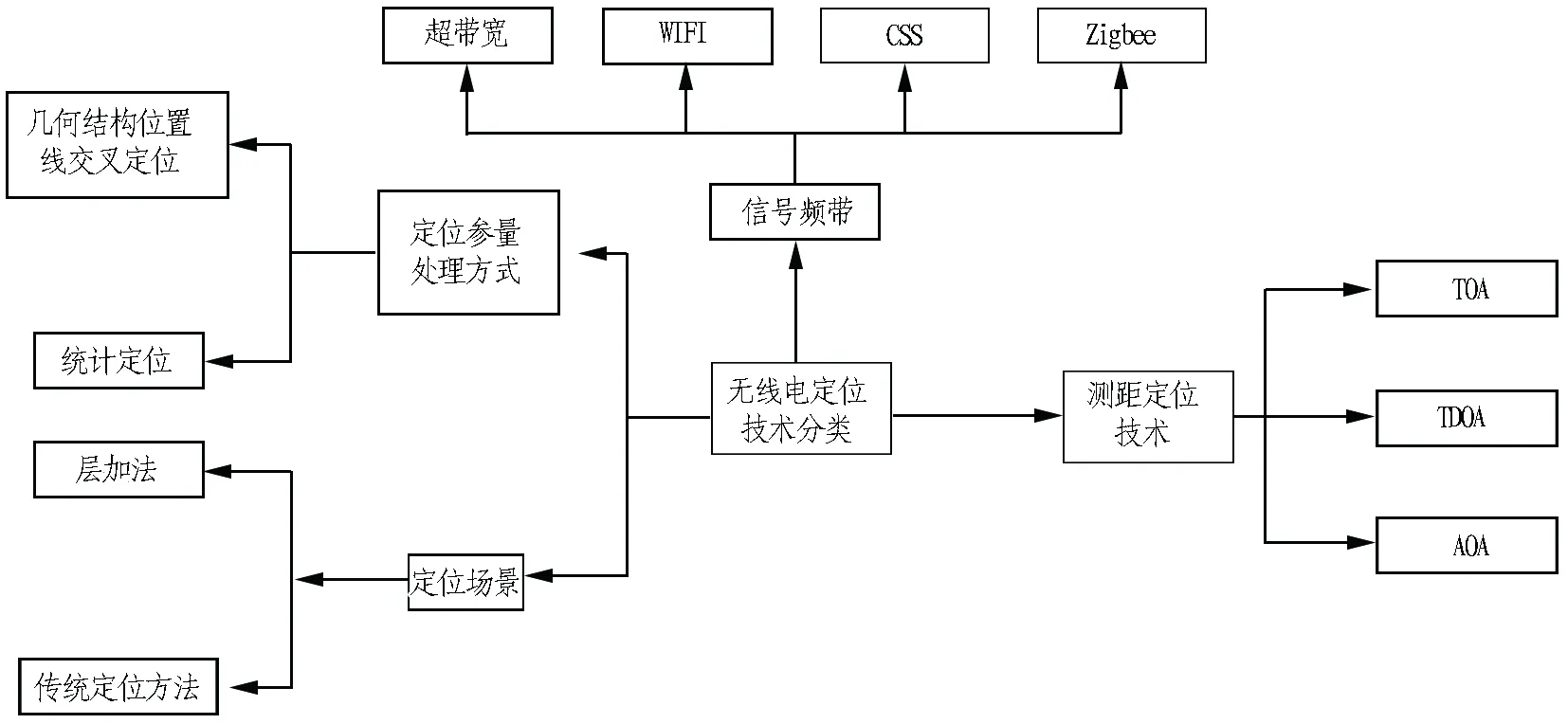
图2 UWB系统定位技术分类
本文所使用的UWB定位技术根据定位参量处理方式可分为几何结构位置线交叉定位和统计定位;根据定位场景可分为传统定位方法和本文提出的层加式定位法;测距定位技术本质是根据各基站与标签定位距离求解非线性方程组[12],在实际应用中比较常见的有TOA、TDOA、AOA技术。本文选用的TOA算法能确定出准确、稳定的目标坐标估值,具有良好的定位精度。
2 系统方案
2.1 系统构成
定位系统构成如图3所示。设备每层部署1个层判断基站和2个层定位基站,利用这3个基站构建所在平台层的平面坐标系,测量层内测量点坐标值。

图3 定位系统构成
所有基站通过底座固定于其所在平台层顶部边缘位置。基站布置时,首先将各层层判断基站固定于所在平台爬梯周围,且保证各层层判断基站在平台平面的一条垂线上。
由于层内附属设备会对定位精度造成影响,部署2个层定位基站时,应选择较为空旷的位置。为提高定位精度,平台内2个层定位基站与层判断基站的圆心夹角应接近120°[13]。
2.2 定位方法
由于竖井掘进机平台隔板对定位信号的干扰,无法通过部署固定基站实现设备内部的定位。将竖井掘进机人员活动区域分为1层平台、2层平台、3层平台、4层平台、4层平台下部、油箱平台、稳定器平台、周边油缸、刀盘梯口等9个平台,借助UWB基站构建出9个平台的定位信息,通过层加法构建出竖井掘进机整机的空间模型,将获得的层级信息与定位坐标相结合确定准确的定位位置。UWB定位方法如图4所示。
2.3 层级判断
UWB定位技术和其他所有电磁波信号一样,是无法穿透金属的,其在其他介质中的传播速度会低于光速,导致所测得的距离与实际距离存在误差[14]。在实际应用中,通过信号强度或测距距离判断目标层级会与其他层基站测得结果有交集。层级与信号强度和测距距离的关系如图5所示。

图4 UWB定位方法
由于竖井掘进机作业人员仅能通过人行爬梯改变所在层级,且爬梯附近设备较少,对信号干扰微弱,借助爬梯时的信号强度变化可以准确推断层级位置。根据这一特性,设计出一种竖井掘进机特有的层级标定方法,如图6所示。
系统将-80 dBm定义为层变换阈值,若层判断基站检测到标签当前信号强度大于阈值时,则改变该标签所在层级;若信号强度小于阈值时,则维持当前层级。采用这种方法确定的层级位置准确,现场试验中判断准确率达100%。

(a) 信号强度

(b) 测距距离
3 系统原理与误差分析
3.1 基站位置标定
竖井掘进机的层加法定位方式需要确定一套统一的坐标体系,系统构建首先要确定坐标原点和X、Y、Z轴方向。需要借助标定基站对基站位置进行标定,标定基站需在平台平面的一条垂线上,且需与本层判断基站位于同一水平面,各层标定基站所在垂直轴线为坐标体系Z轴。
将1层平台的层判断基站坐标值定义为坐标原点,层判断基站所在轴线定义为三维坐标系的Z轴,层判断基站指向标定基站方向定义为三维坐标系的X轴,经过层判断基站的XOZ平面法线定义为三维坐标系的Y轴。
平台层内基站均安装在平台顶部,平台层其他基站与标定基站的Z轴坐标近似相等,为本层判断基站与1层平台层判断基站间的高度差值z0。将层判断基站的三维坐标值定义为(0,0,z0),层标定基站的三维坐标值定义为(x3,0,z0),定位基站1的三维坐标值定义为(x1,y1,z0),定位基站2的三维坐标值定义为(x2,y2,z0),其中x3,x1,y1,x2,y2为未知量。利用基站的TOF测距法,测得层判断基站与其余基站的距离分别为d01、d02、d03,层标定基站与定位基站1和定位基站2的距离分别为d13、d23,定位基站1和定位基站2之间的距离为d12。基站间坐标关系如图7所示。

图7 基站间坐标关系
其中,距离与坐标值的关系为:
(1)

(2)
经过u次迭代运算后,
Xu+1=Xu+ΔXu。
(3)
(4)
ΔFu=A-Au。
(5)
A=[d03,d01,d02,d13,d23,d12]。
(6)
Au=[d03|Xu,d01|Xu,d02|Xu,d13|Xu,d23|Xu,d12|Xu]。
(7)
(8)
式(3)—(8)中:Xu+1表示经过u次迭代运算后X的值;Xu表示第u次迭代前X的值; ΔXu表示第u次迭代的迭代项;Hu表示第u次迭代时一阶泰勒展开式系列矩阵; ΔFu表示第u次迭代时测定距离与计算距离的差值;A表示基站实际测定距离;Au表示将Xu代入式(1)后基站距离的计算值。
当ΔXu小于设定阈值时,迭代结束,将Xu+1的值作为X的终值,得出定位基站1和定位基站2的位置坐标,实现基站的标定。
3.2 定位计算
系统采用TOA定位法,定位示意图如图8所示。根据基站位置的标定结果,得到3个基站的坐标分别为(0,0,z0),(x1,y1,z0),(x2,y2,z0),假设标签A点坐标为(xA,yA,zA),得出距离与坐标值的关系为:
(9)
为方便运算,将式(9)中各项相减,得到关于x、y、z的线性方程组为:
(10)
求解方程组,可得到对应坐标值:
(11)
其中,
(12)
(13)

R0A、R1A、R2A分别为3个基站到标签A点的距离。
4 试验及工程实例
4.1 依托工程概述
本文依托世界首台全断面硬岩竖井掘进机施工项目——浙江宁海抽水蓄能电站排风竖井项目工程,该项目设计井深198 m,井筒净直径7.83 m,井颈段深度10 m,如图9所示。矿体为凝灰岩类沉积岩,采用锚网喷与锚喷支护。鉴于该工程具有埋深大、岩压高、环境差等特点,为提升项目建设的安全性,部署了超宽带人员定位系统,实现井下无人、自动掘进、地面远程操控。

图9 宁海抽水蓄能电站排风竖井项目
4.2 定位试验
为验证真实环境中不确定因素对系统精度产生的影响,以便更真实地研究竖井掘进机场景定位系统精度变化,需要对系统定位精度进行测试。
本次试验在宁海排风竖井项目设备2层平台进行,平面布置图如图10所示。其中,1、2、3是2层平台中的3个定位基站,4为移动定位标签,该标签固定在三角支架上,测试过程中保持标签垂直高度不变。

图10 2层平台平面布置图(单位: m)
图10中,3个定位基站的坐标分别为1(0,0,0),2(5.58,3.22,0),3(5.58,-3.22,0),4为使用三角架架设的移动测距点,坐标设为(xn,ym,-1)。移动测距点取值范围为xn(0,1,2,3,4),ym(-2,-1,0,1,2)。系统平面定位精度试验数据如表1所示。
由表1可知,由于现场环境因素和定位算法偏差,测试过程中均存在误差距离,但整体误差距离基本处于0.2 m以下,满足设备施工作业的定位精度要求。
4.3 人机交互界面
人机交互界面如图11所示。界面采用Vue.js语言开发[15],可显示作业人员实时位置,警示进入危险区域人员,同时,系统还具备历史轨迹分析、电子围栏、智能预警、视频联动等功能,为现场人员提供安全保障。

表1 系统平面定位精度试验数据

图11 人机交互界面
5 结论与建议
针对竖井掘进机施工中面临的各类风险点和复杂的人员安全管理现状,设计了一种适用于竖井掘进机的UWB分层平面定位系统,采用“层判断基站+层定位基站”的层加法设计,实现了竖井作业区域内人员的实时位置定位;结合定位参数计算过程和可能引起误差因素的分析,提高了定位的精准度。工程试验表明,系统定位误差小于0.2 m,层判断精准度达100%,能满足竖井掘进机施工作业的定位精度要求。
下一步将结合定位关键技术、基站部署方式优化等进一步提高定位精度,以实现人员的三维精准定位。该技术未来可拓展应用至隧道建设、城市管廊等领域的施工作业区域内人、机、料的实时位置定位,以推动地下工程施工向无人化、智能化方向发展。
猜你喜欢
北京汽车(2023年1期)2023-03-03 00:50:38
工业安全与环保(2022年5期)2022-05-17 07:22:04
测控技术(2018年8期)2018-11-25 07:42:34
机械研究与应用(2018年3期)2018-07-11 00:25:38
水利规划与设计(2017年8期)2017-12-20 08:24:14
凿岩机械气动工具(2015年3期)2015-11-11 07:32:49
凿岩机械气动工具(2014年3期)2014-03-01 04:00:08
凿岩机械气动工具(2014年2期)2014-03-01 04:00:00
河南科技(2014年16期)2014-02-27 14:13:09
金属矿山(2013年6期)2013-03-11 16:53:59