基于磁流变阻尼器的结构仿人智能控制方法研究
2022-07-21 08:24李振东
地震工程与工程振动 2022年3期
李振东
(中铁第四勘察设计院集团有限公司,湖北武汉 430063)
引言
在土木工程领域,控制技术广泛用于减轻动力作用危害以及提高结构在地震等外部作用下的抗震性能。半主动控制由于既具有被动控制的可靠性又保留了主动控制的多功能性和适应性而备受国内外学者关注[1]。磁流变(magnetorheological,MR)阻尼器是一种重要的半主动控制装置,其为一种基于磁流变液的可控阻尼器。磁流变液[2]是一种两相悬浮的智能驱动材料,在磁场作用下能在0.01 s 的瞬间由牛顿流体变成粘塑性体或反之,MR阻尼器通过调节磁化电流来控制此粘塑性体的屈服剪切应力,并且对电源具有非常低的功率要求,这对于在地震期间可能造成大功率设备主供电源被切断显得尤为重要。近年来,基于MR阻尼器的半主动控制越来越多的受到人们的关注[3,4]。
迄今为止,国内外学者开发了许多有效的半主动控制方法,通常将它们分为2 类:基于模型的控制和基于软计算的智能控制。基于模型的控制,如线性最优控制[5-7]、瞬时最优控制[5-6]、线性二次型(LQR)最优控制[1,8]、线性二次型高斯(LQG)最优控制[1,6]、滑模控制[9]等。欧进萍等[8]提出了基于MR 阻尼器的海洋平台LQR 最优控制系统,可以有效降低平台结构位移和甲板加速度响应。Dyke 等[1]提出了剪切最优控制器(COC)用于将理想的控制力转化为MR 阻尼器的控制电压,采用COC 和H2/LQG 控制方法对设有MR 阻尼器的3层框架进行仿真研究,结果表明半主动控制能有效降低结构动力响应。Lee等[9]研究对比了滑模控制与2种被动控制的减隔震效果,研究表明滑模控制在减低桥梁位移响应方面优于2种被动控制。基于模型的控制方法,控制目标和增益矩阵的选择是一个相对不确定的因素,需要依靠设计者的经验,选择不合理可能会影响最终的控制效果。神经网络控制[10-12](NNC)、模糊逻辑控制(FLC)[13-15]、智能优化算法控制(IOAC)[16]以及三者的相互结合构成了类型多样的智能控制。Wang等[12]研究提出了一种神经网络控制方法,设计了MR阻尼器逆模式神经网络和用于预测下一时刻MR阻尼器驱动电流的神经网络。Choi等[13]设计了一种模糊逻辑控制器,用于降低MR 阻尼结构的地震响应。Yan等[16]提出了一种遗传自适应模糊控制,将控制目标转化为适应度函数,用于设有MR阻尼器的结构在地震载荷作用下振动控制,通过仿真研究证明了该方法在减低结构动力响应方面的有效性。但是,智能控制也存在一些问题,如神经网络控制在网络结构的选择、训练集的选取、网络的稳定性等方面的研究尚不够深入。一般地,智能控制系统设计困难、实现过程复杂,往往对控制计算机的硬件设施要求很高,有时需要依赖特定的开发平台,这使结构控制实施难度加大。
针对以上现状,本研究提出了一种仿人智能PID控制策略,并应用于一个磁流变阻尼结构的振动控制系统。这种控制算法可以根据输入信息来识别被控系统所处的状态、动态特征及行为,并模仿人的智能控制决策行为实现对系统的智能控制。该算法构造简单,很好地解决了控制过程中的快速性、稳定性和准确性的矛盾。通过仿真分析,验证了仿人智能PID算法在结构振动控制应用中的可行性和有效性。
1 MR阻尼器的力学特性试验和建模
试验阻尼器主筒直径150 mm,设计行程±80 mm,最大出力100 kN。试验测试系统如图1 所示,采用频率为0.15 Hz,振幅为±7 cm 的正弦激励,控制信号电压采用恒定电压:0、1.5、2.4、3.3、4.5、6.0 V,对应的磁化电流分别为0、1.5、2.4、3.3、4.5、6.0 A,MR 阻尼器的响应结果如图2 所示。

图1 试验测试系统Fig.1 Experimental test system

图2 MR阻尼器试验曲线Fig.2 Test result curve of MR damper
Spencer现象模型[1]被广泛应用于描述MR阻尼器的力学特性,该模型组成如图3 所示。MR 阻尼器的阻尼力f可通过下式确定:

式中:x1为活塞的相对位移;z为演化变量,可通过式(2)和式(3)确定:

式中:k0、k1、c0、c1为图3中结构的相关特性参数;x0为刚度为k1弹簧的初始位移;γ、β、A的调整可以控制MR阻尼器滞回曲线的形状。
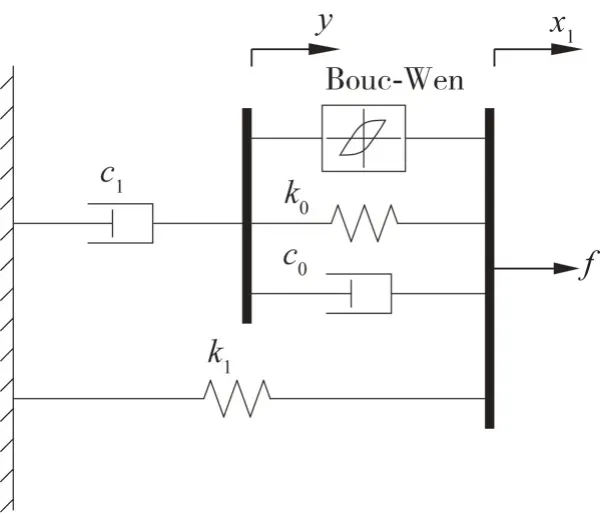
图3 MR阻尼器的力学模型Fig.3 Mechanical model of MR damper
控制信号电压通过影响参数α、c0、c1的取值来影响MR阻尼器的阻尼力f,为了确定适用于波动磁场的综合模型,参数α、c0、c1被定义为有效电压u的线性函数,如下:

为模拟MR 阻尼器中磁流变液达到流变平衡所涉及的动力学特性,采用如下一阶滤波器来计算有效电压u:

式中:ν为输入的控制电压信号;u为滤波器的输出;η用于反映MR阻尼器在电流驱动时电磁铁的动力特性。
式(1)~式(7)共包含了14个参数,利用MATLAB优化工具箱对模型的参数进行识别[17],由于参数η的识别需要引入MR 阻尼器变电压控制试验,试验条件限制的原因,这里假设η取180 s-1。MR 阻尼器参数识别结果见表1,图4为试验与模拟结果的比较。结果表明,Spencer模型能够较好地反映MR阻尼器的力学特性。
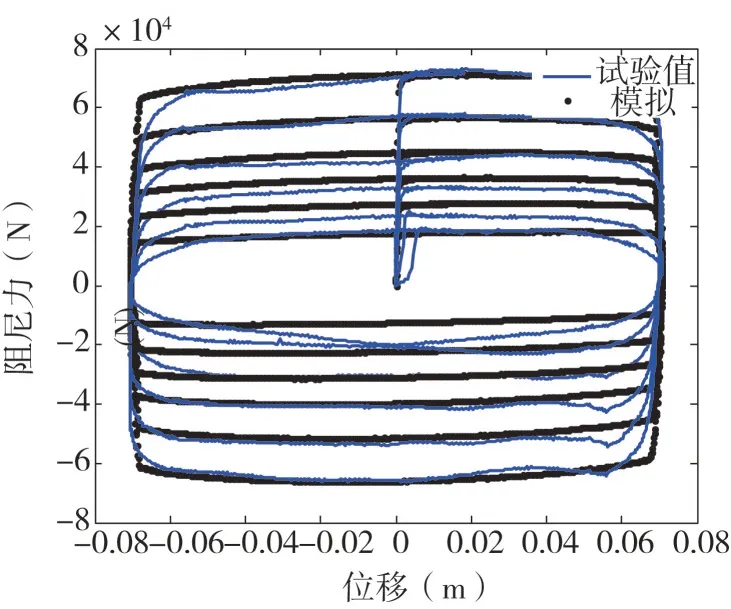
图4 MR阻尼器试验与模拟结果比较Fig.4 Comparison of experimental and simulation results of MR damper
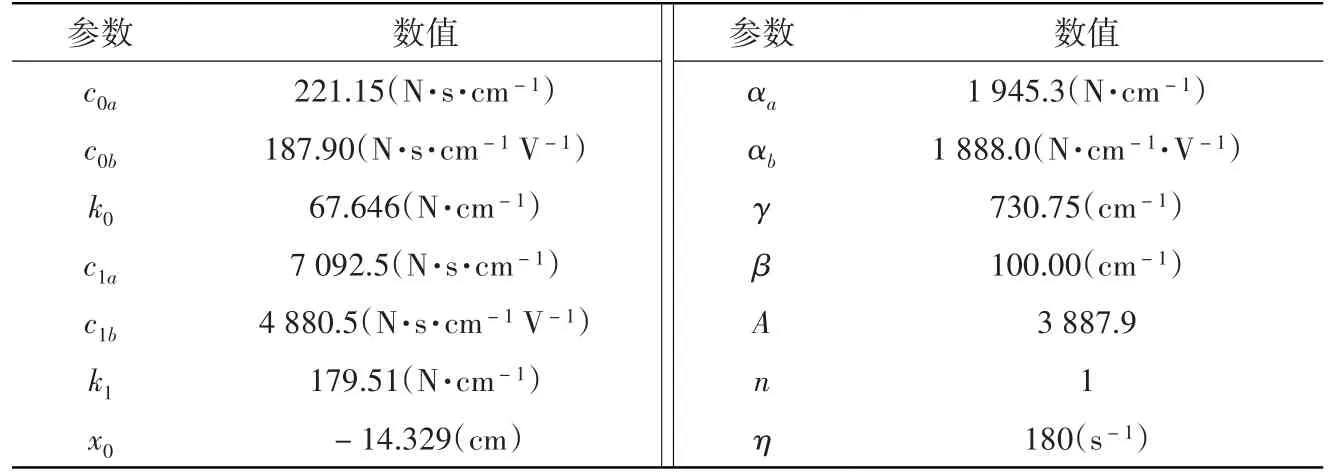
表1 MR阻尼器力学模型的参数表Table 1 Parameters of MR damper mechanical model
2 基于MR阻尼器的PID控制方法
常规PID 控制将系统受控量与目标值之差e的比例、积分和微分的线性组合作为控制量对受控对象实施控制,基于MR 阻尼器的PID 控制系统如图5 所示,通过调整PID 控制的比例系数(Kp)、积分系数(Ki)和微分系数(Kd)能够获得比较满意的控制效果。
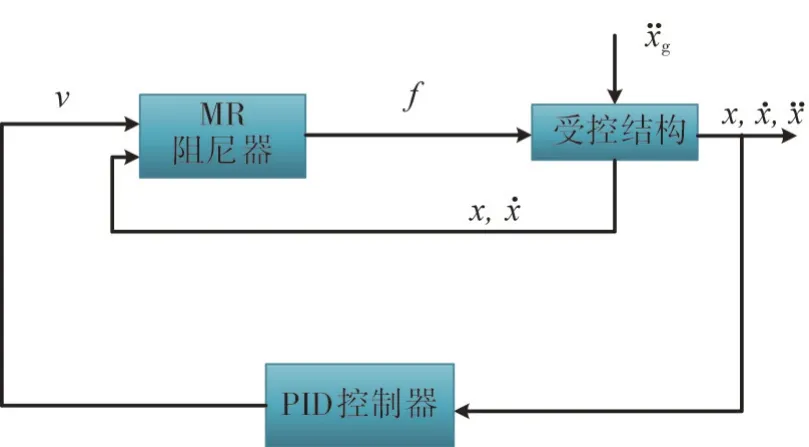
图5 PID控制系统框图Fig.5 The PID control system block diagram
在控制系统中,PID控制器的离散化表示形式为:

式中:s(k)为控制器第k个时刻输出;e(k)控制器第k个时刻误差值;ec(k)为第k个时刻误差的微分。
3 基于MR阻尼器的结构仿人智能PID控制方法
3.1 仿人智能PID控制基本原理
仿人智能PID控制将常规PID控制与专家控制相结合,根据受控结构响应的动态特征及行为,借助专家控制经验、启发式直观判断和直觉推理规则来实现对结构的控制,以增强系统对不确定因素的适应性、鲁棒性。为实现仿人智能控制,选用受控量与目标值之差e及其变化Δe作为仿人智能控制器的输入信号,则输出s表示为:

研究选择结构的层间位移作为受控量,目标值设为0 m,误差的变化Δe定义为当前时刻和前一时刻层间位移之差,特征变量e(k)·Δe(k)表征了层间位移的绝对值的变化趋势,而控制器的输出为MR阻尼器的控制电压(0~6 V)。基于MR阻尼器的结构仿人智能控制系统如图6所示。

图6 仿人智能PID控制系统框图Fig.6 The humanoid intelligent PID control system block diagram
3.2 仿人智能控制算法
设e(k)表示当前采样时刻的误差值,e(k-1)和e(k-2)分别表示前一个和前两个采样时刻的误差值,则有:

根据系统所处的状态、相对位移绝对值变化情况以及是否处于极值对MR阻尼器采用不同的控制策略,如表2所示。
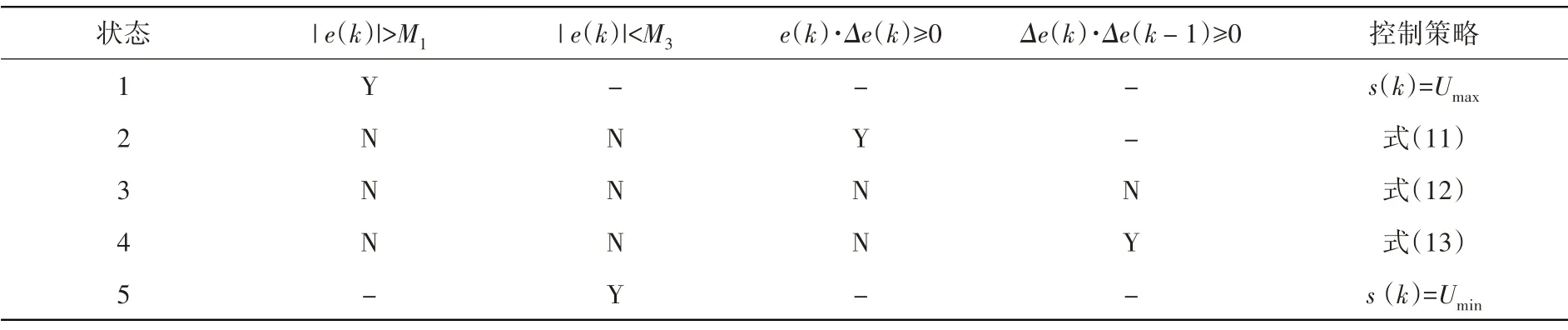
表2 MR阻尼器电压控制策略Table 2 Voltage control strategy of MR damper
(1)当|e(k)|>M1时,对应状态1,由于误差的绝对值很大,此时不考虑误差的变化趋势,对系统实施开环控制,MR阻尼器采用Passive-on 控制,控制器按照控制电压的上限输出,即:s(k)=Umax;
(2)当e(k)·Δe(k)>0或Δe(k)=0时,对应状态2,误差在向绝对值增大的方向变化或误差不发生变化,此时根据误差绝对值|e(k)|的大小来实施控制,促使|e(k)|向减小的方向移动,|e(k)|较大时采用较强控制,较小时采用一般控制,控制器的输出表示为:

(3)当e(k)·Δe(k)<0 且Δe(k)·Δe(k-1)<0 时,对应状态3,误差处于极值,同情形(2),可根据误差绝对值|e(k)|的大小来实施控制,使|e(k)|能够快速衰减,此时控制器的输出表示为:

(4)当e(k)·Δe(k)<0 且Δe(k)·Δe(k-1)>0,或者e(k)=0 时,对应状态4,误差在向绝对值减小的方向变化或误差达到平衡,此时保持控制器输出不变,表示为:

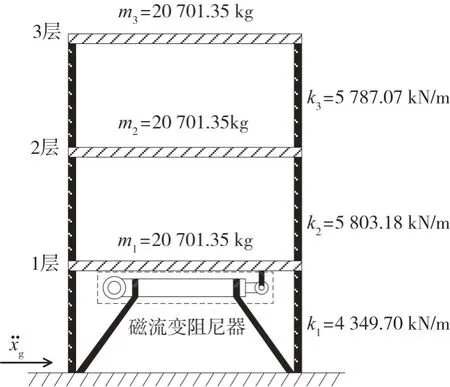
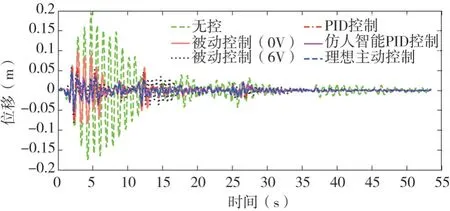
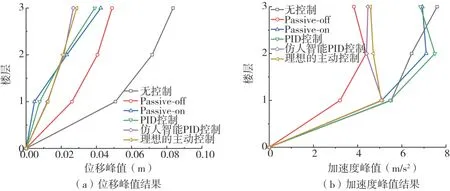
(5)当|e(k)| 上述控制算法中,s(k)、s(k-1)分别为控制器第k次和第k-1 次输出;k1为放大系数,且k1>1;k2为抑制系数,且0 本节通过数值模拟来评估仿人智能PID 控制算法的性能。研究选取一个三层剪切型框架,其原型结构为Chung等[18]使用的振动台试验模型,如图7所示。 图7 三层框架模型Fig.7 Three-story frame structure model 地震作用下,结构的运动学方程为: 式中:m、k、c分别为结构质量矩阵、刚度矩阵和阻尼矩阵;f为MR 阻尼器阻尼力,由式(1)~式(7)确定;x=[x1,x2,x3]T为相对于地面的结构位移矢量;Γ=[ -1,0,0]T为MR阻尼器位置指示矩阵;Λ=[ 1,1,1]T为地震作用向量为地震地面运动加速度。 结构的质量矩阵m、刚度矩阵k分别为: 结构阻尼假设为Rayleigh阻尼,按下式确定: 式中,a0和a1分别为质量矩阵和刚度矩阵的组合系数,可按下式求解: 式中:ωm和ωn分别为结构的第m阶和第n阶自振频率;ξm和ξn为相应于第m阶和第n阶振型的阻尼比。这里取m=1,n=2,解得结构自振频率为ω1=6.845 8 rad/s,ω2=19.904 4 rad/s,设第1阶和第2阶振型的阻尼比ξ1=ξ2=0.02,则结构阻尼矩阵为: 将系统的运动方程写入状态空间,相应状态方程可以表示为: 式中,状态变量Z及矩阵A、B1、B2如下: 系统输出状态方程: 式中,输出状态向量Y及矩阵C、D1如下: 因此,结构的状态空间模型可以表示为: 式中,u(t) =[(t),f(t)]T为仿真输入向量;B=(B2B1);D=(0 D1)。 外部激励选择El Centro(NS,1940)波,加速度峰值为3 417 mm/s2,如图8 所示。MR 阻尼器采用第1 节所建立的现象学模型模拟,增益设为2,以满足控制力要求。在进行模拟时,将参数x0设定为0,以消除结果不对称现象,使结构位移响应的稳态值为0。 图8 El Centro 波Fig.8 El Centro wave 为证明所提控制方法的可行性和有效性,仿真考虑5种情况:无控、被动控制(0 V 和6 V)、常规PID 控制、仿人智能PID控制以及理想的主动控制。 常规PID 控制采用试凑法来确定参数的取值,在Kp取0.72、Ki取0、Kd取0.05,仿真可以得到较好的结果。对于仿人智能PID 控制,当层间位移小于h/1 000 时,采用Passiveoff,故考虑控制器的输入为e/(h/1 000)。参数M1的取为4;M2取为2.5;M3取为1;k1取1.5;k2取0.5;Kp取0.02;Ki取0;Kd取0.001。为了控制仿人智能PID 控制器输出,增设制约控制器输出,确保MR 阻尼器输入电压为0~6 V。为比较主动与半主动控制系统,设计了理想的线性主动控制器[1],使其控制力与半主动控制力相近。理想的主动控制被认为是采用控制力能力相当的主动控制系统能达到的最好性能的控制策略。 表3 给出了结构在El Centro 波激励下不同控制策略结构的响应峰值情况,图9 和图10 分别给出了在El Centro 波激励下不同控制策略结构3层位移和绝对加速度时程曲线。 表3 El Centro 波激励下不同控制策略结构的响应峰值Table 3 The peak structural response of different control strategies under El Centro wave excitation 图9 El Centro 波激励下不同控制策略结构3层位移时程曲线Fig.9 Displacement time-history curves of the third floor with different control strategies under El Centro wave excitation 图10 El Centro 波激励下不同控制策略结构3层加速度时程曲线Fig.10 Acceleration-time curves of the third floor with differ‐ent control strategies under El Centro wave 由表3 可以确定被动控制(Passive-off 和Passive-on)对3 层的相对位移控制效果为49.7%和58.8%、绝对加速度的控制效果为45.8%和30%、层间位移控制效果为45.6%和30%,可见被动控制具有一定的控制效果。同时注意到Passive-on 由于较大的阻尼力增加了顶层的层间位移以及顶层的加速度,这表明选择能产生最大阻尼力的被动设备并不总能达到较好的控制效果,该结论可以直观地从图9 和图10 反映。PID 控制和仿人智能PID控制由于具备对系统动态修正的特点,两者较两种被动控制模式均具有较好的控制效果,而仿人智能PID 控制具有更高的性能。虽然仿人智能PID 控制对1层的相对位移和绝对加速度的控制效果较Passive-on略差,但是对上层的相对位移、层间位移和绝对加速度控制效果均比两种被动控制和PID控制好,说明基于MR阻尼器的仿人智能PID控制在建筑结构振动控制应用中的可行性和有效性。 为评估仿人智能PID控制的优越性,将其控制效果与理想的主动控制做比较,主动控制下结构的响应峰值见表3。从图9 和图10 中可以看出理想的主动控制对结构响应峰值的控制较好,尤其对加速度的控制十分有效。定量地分析,二者对3 层的相对位移控制效果为75.1%和72.9%、绝对加速度的控制效果为46.0%和54.0%、层间位移控制效果为46.1%和53.9%;对结构的最大层间位移控制效果为57.1%和67.9%。可见仿人智能PID 控制在降低顶层相对位移峰值方面的性能比线性主动控制略好,并且仿人智能PID 控制的最大层间位移要比主动控制的控制效果小10.8%,另外两者的控制效果相差均小于10%,这一结果可能归于MR阻尼器良好的适应性和稳定性以及仿人智能PID 算法的有效性。进一步分析二者对3 层的平均控制效果,发现对相对位移的控制相差0.84%,对绝对加速度的控制相差5.98%,二者十分接近。由此可知仿人智能PID控制可以达到甚至超过理想主动控制的性能,考虑到半主动控制具有非常低的功率要求,这一结果是相当显著的。 为进一步评估仿人智能PID控制的有效性,另外选择迁安波(NS,1976)作为外部激励,调幅后加速度峰值为5 295.7 mm/s2,得到各种控制策略下结构响应峰值如图11 所示。从图中可以看出仿人智能PID 控制在减小结构动力响应方面效果较好,其在降低顶层相对位移峰值方面的性能尤为突出,并且可以有效控制结构的加速度响应。值得注意的是,在进行仿真时,未改变仿人智能PID 控制的参数,该结果表明仿人智能PID控制具有较好的内在稳定性。 图11 迁安波激励下不同控制策略结构各层响应峰值Fig.11 The peak structural response of each floor with different control strategies under Qian′an wave excitation 文中提出了一种仿人智能PID 控制算法,其本质是基于层间相对位移大小和变化趋势来控制MR 阻尼器的工作电压,能够有效减小结构的动力响应。通过研究分析得到如下结论: (1)MR阻尼器的力学性能试验表明,Spencer模型可以比较准确地描述MR阻尼器的力学特性。 (2)数值结果表明,PID控制和仿人智能PID控制均具备对系统动态修正的特点,两者较2种被动控制模式均具有较好的控制效果,但仿人智能PID 控制性能更高一筹,其对上层的相对位移、层间位移和绝对加速度控制效果均比两种被动控制和PID控制好,说明基于MR阻尼器的仿人智能PID控制在建筑结构振动控制应用中的可行性和有效性。 (3)对比仿人智能PID控制与理想的主动控制方法,仿人智能PID控制在降低顶层相对位移峰值方面的性能比线性主动控制略好,并且仿人智能PID控制的最大层间位移要比主动控制的控制效果好,另一方面二者对结构控制的平均效果相差较小,说明仿人智能PID控制可以达到甚至超过理想主动控制的性能。 值得注意的是,文中通过数值方法对所提控制算法的可行性和有效性进行了验证,但尚未进行振动台试验,有关该控制方法的进一步研究将在后续工作中展开。4 数值模拟与分析













5 结论
猜你喜欢
世界地震工程(2022年2期)2022-05-11建材发展导向(2022年5期)2022-04-18振动工程学报(2019年5期)2019-11-27学生导报·东方少年(2019年20期)2019-11-27振动工程学报(2019年2期)2019-05-13绿色科技(2017年12期)2017-07-21新高考·教师版(2016年2期)2017-07-05中学生数理化·高一版(2016年8期)2016-12-07振动工程学报(2016年2期)2016-07-20筑路机械与施工机械化(2016年6期)2016-07-16