
基于图像处理的油气站场管道完整性检测方法
2022-07-19 03:01刘苒
无损检测 2022年5期
刘 苒
(1.中国石油集团工程技术研究有限公司,天津 300451;2.中国石油天然气集团公司石油管工程重点实验室 涂层材料与保温结构研究室,天津 300451)
油气运输工程中油气管道是最重要的组成部分,其完整性关系到油气运输的安全性。油气管道多数布置在野外,环境条件较为恶劣,易遭到破坏和腐蚀,造成油气泄漏。油气泄漏不仅会造成经济损失,资源浪费,而且极易引发火灾,存在较大的安全隐患[1]。在此背景下,有关负责部门会安排专业人员对油气站场管道的完整性进行定期检测,以便日常维护和检修,降低泄漏事故的发生率。由于油气管道线路较长,布设环境恶劣,利用人工进行检测难度大,也无法做到实时检测,效率较低[2]。
许少波等[3]针对负压波法存在的缺陷,研究了超声波流量计在油气管道泄漏检测中的应用。该方法通过采集超声波在流体中的传播速度,利用流量与速度之间的关系式计算出管道中的石油液体的流量。一旦管道存在泄漏,管道中的流量平衡状态就会被破坏,通过得到的石油液体流量数据就可以确定管道是否发生泄漏。杨辉等[4]提出了一种用于油气管道缺口检测的漏磁检测方法,管道若无缺陷,磁力场分布规律;若存在缺陷,磁力线在缺陷部位会发生变形,由此可实现管道缺陷的识别和判定。王贵愚等[5]提出了一种基于STA/LTA算法的检测方法。该方法主要通过分析负压波波形变化特征来确定管道是否存在缺陷,然后再进一步通过信号传播的时间差来确定泄漏点位置。
虽然学者们的研究都取得了一定的成果,但这些方法都存在一定的局限性,例如超声波法采集到的数据并不完全是缺陷数据,也包括锈斑和泥点数据。漏磁法易受管道表面自身杂质的影响,且对较浅的缺陷检测效果较差。负压波形法则对一些细微泄漏点的检测不准确,因为其压力变化波形不明显。针对上述问题,笔者提出一种基于图像处理的油气站场管道完整性检测方法,以提高管道完整性检测的准确性。
1 基于图像处理技术的油气管道完整性检测研究
研究主要分为4部分,即油气管道图像采集、图像处理、图像特征提取以及油气管道完整性判断[6]。
1.1 油气管道图像采集
油气管道完整性检测的第一步是采集油气管道图像,然后通过分析图像来识别缺陷。油气管道布设在野外,在野外直接布设摄像头进行监控是不现实的[7]。为此,文章通过管道机器人进行油气管道图像采集,采集现场如图1所示。

图1 油气管道图像采集现场
管道机器人主要由6部分组成,即视觉感知系统(摄像头)、控制中心、行走机构、通信系统、照明系统以及电源[8]。这几部分的具体功能如下所述。
(1) 视觉感知系统主要用于管道内图像的拍摄[9]。
(2) 控制中心运行所有逻辑程序、接收和发射各种任务。
(3) 行走机构是管道机器人的移动载体,目前有履带式、轮式、蠕动式、多足行走式等几种形式。需要根据管道材料、弯曲程度、运输物质等进行具体选择[10]。
(4) 通信系统。通信系统是机器人与远程控制中心的联系桥梁,负责将拍摄的图像传输给控制中心。
(5) 照明系统。管道内光线较暗,不利于图像拍摄,因此需要通过照明系统提供光照辅助。
(6) 电源。电源为管道机器人运行提供驱动力。
1.2 图像处理
1.2.1 图像灰度化
使用加权平均法对图像进行灰度化[11],其公式为
F′(i,j)=0.30R(i,j)+0.59G(i,j)+
0.11B(i,j)
(1)
式中:F′(i,j)为图像灰度化后(i,j)处的灰度值;R(i,j)、G(i,j)、B(i,j)为红、绿、蓝色的分量。
1.2.2 图像滤波
受到外部环境和采集系统内部设备运行产生的噪声影响,拍摄的油气管道图像中存在很多噪点。噪点的存在会模糊图像中的细节信息,不利于细小缺陷的检测[12]。因此文章使用自适应中值滤波法对图像进行滤波处理。该方法由中值滤波法发展而来,中值滤波法原理如下所述。
(2)
式中:F(i,j)为中值滤波后(i,j)处的灰度;{fij}为图像滤波模板内所有像素点的数值集合;A为滤波模板。
由于中值滤波法的模板是固定的,当模板内的噪声点数量多于正常像素点时,该方法的去噪效果就受到极大的限制,而自适应中值滤波法使得模板能够根据噪声情况进行自适应改变[13]。图像滤波过程如下所述。
(1) 确定初始滤波窗口,以5×5 模板为例。
(2) 计算模板内所有像素的灰度,并按照从小到大的顺序排序。
(3) 从像素点序列中选出最小值fmin、最大值fmax、中间值fmed以及任意点的像素fij。
(4) 判断中间值fmed是否大于最小值fmin且小于最大值fmax。若是,进一步判断任意点的像素fij是否大于最小值fmin且小于最大值fmax,若是,进入下一步;否则,输出中间值fmed,利用中间值代替模板内的其他像素值。若否,增加新滤波窗口,并判断新的滤波窗口中任意点的像素Aij是否不大于新滤波窗口中的最大值Amax,若是,回到步骤(2);否则进入下一步。
(5) 图像中任意点的像素fij原来的灰度不变。
自适应中值滤波达到去噪目的的同时,也不至于使得图像中的细节信息被模糊掉。
1.2.3 直方图均衡化
受光线影响采集到的管道图像明暗不一,有的曝光过度,有的曝光过低。为了解决这一问题,进行直方图均衡化[14]。具体过程如下所述。
(1) 计算管道图像中每一阶灰度值出现的频率。计算式为
Q(sk)=mk/M
(3)
式中:sk为第k级的灰度值;Q(sk)为sk出现的频率;mk为sk的像素个数;M为图像中像素点总数。
(2) 按照式(4)计算第k级灰度值sk的累积频率Yk。
(4)
(3) 按照式(5)计算原始灰度级对应的映射灰度级Rk。
Rk=int{[max(sk)-min(sk)]·Yk+0.5}
(5)
式中:max(sk),min(sk)为第k级灰度值的最大值和最小值。
(4) 根据映射关系输出均衡化后的图像。
经过均衡化后,图像对比度得到了很大的提高。
1.3 管道缺陷特征提取
管道完整性检测以从图像中提取出的特征参数作为参考[15]。该章节以管道缺陷特征提取为重点进行研究,具体流程如图2所示。
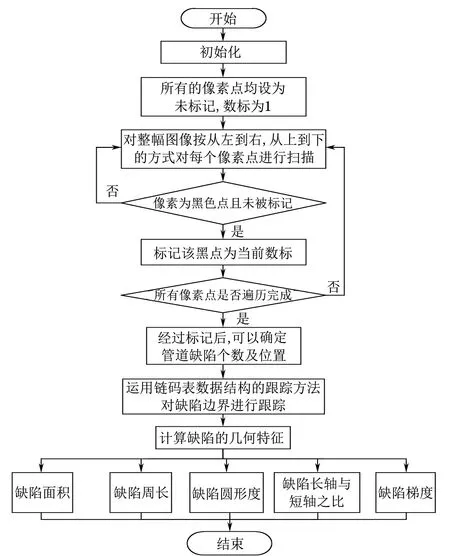
图2 管道缺陷特征提取流程
缺陷面积通过直接计算黑色像素点数量即可得到。缺陷周长指黑色像素点覆盖区域最外围的长度,计算式为
(6)
式中:L为缺陷周长;α,β为链码值为奇数、偶数的个数。
缺陷圆形度是指区域形状的紧凑程度,计算式为
γ=L2/C
(7)
式中:γ为缺陷的圆形度;C为缺陷区域的面积。
缺陷梯度描述了缺陷部位像素值的变化率,计算式为
B=G1/G2
(8)
式中:B为缺陷梯度;G1为图像矩阵像素点中垂直方向的像素值;G2为图像矩阵像素点中水平方向的像素值。
1.4 油气管道完整性判断
基于上述提取的特征参数,通过构建分类器来进行油气管道完整性判断,具体流程如图3所示。
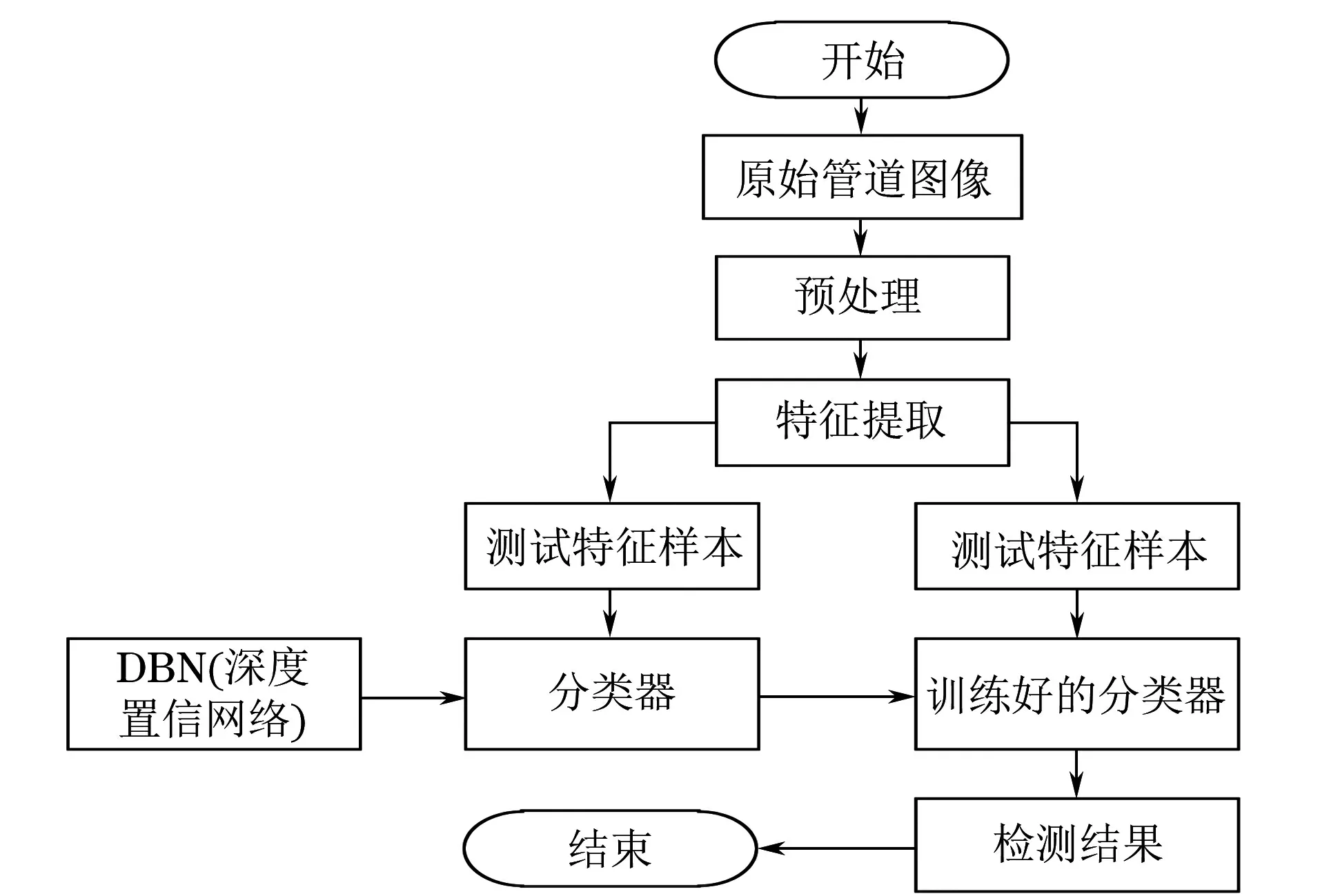
图3 油气管道完整性判断流程
构建的分类器为DBN(深度置信网络),是深度学习中的一种,由输入层、若干堆叠的隐藏层和输出层构成,其与一般神经网络运行的过程一样,需要进行训练,调整各层连接权值和阈值,然后将不同类型缺陷的5个特征值输入到训练好的模型当中,即可实现油气管道完整性检测[16]。
2 仿真测试与分析
为测试所研究检测方法在油气站场管道完整性检测中的效果,在MATLAB仿真平台上进行试验。
2.1 样本采集
利用管道机器人采集某一段油气模拟管道图像,共采集到22 521幅,将这些图像共分为6类,不同类型的图像分布情况如图4所示。

图4 不同类型图像的分布情况
2.2 图像处理结果
选取一幅图像,对其进行预处理,预处理结果如图5所示。
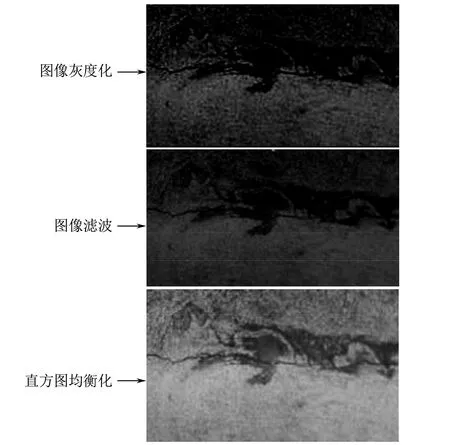
图5 某幅图像的预处理结果
2.3 几何特征提取
计算图像样本的缺陷面积、缺陷周长、缺陷圆形度、缺陷长轴与短轴之比、缺陷梯度等5个几何特征参数,部分结果如表1所示。
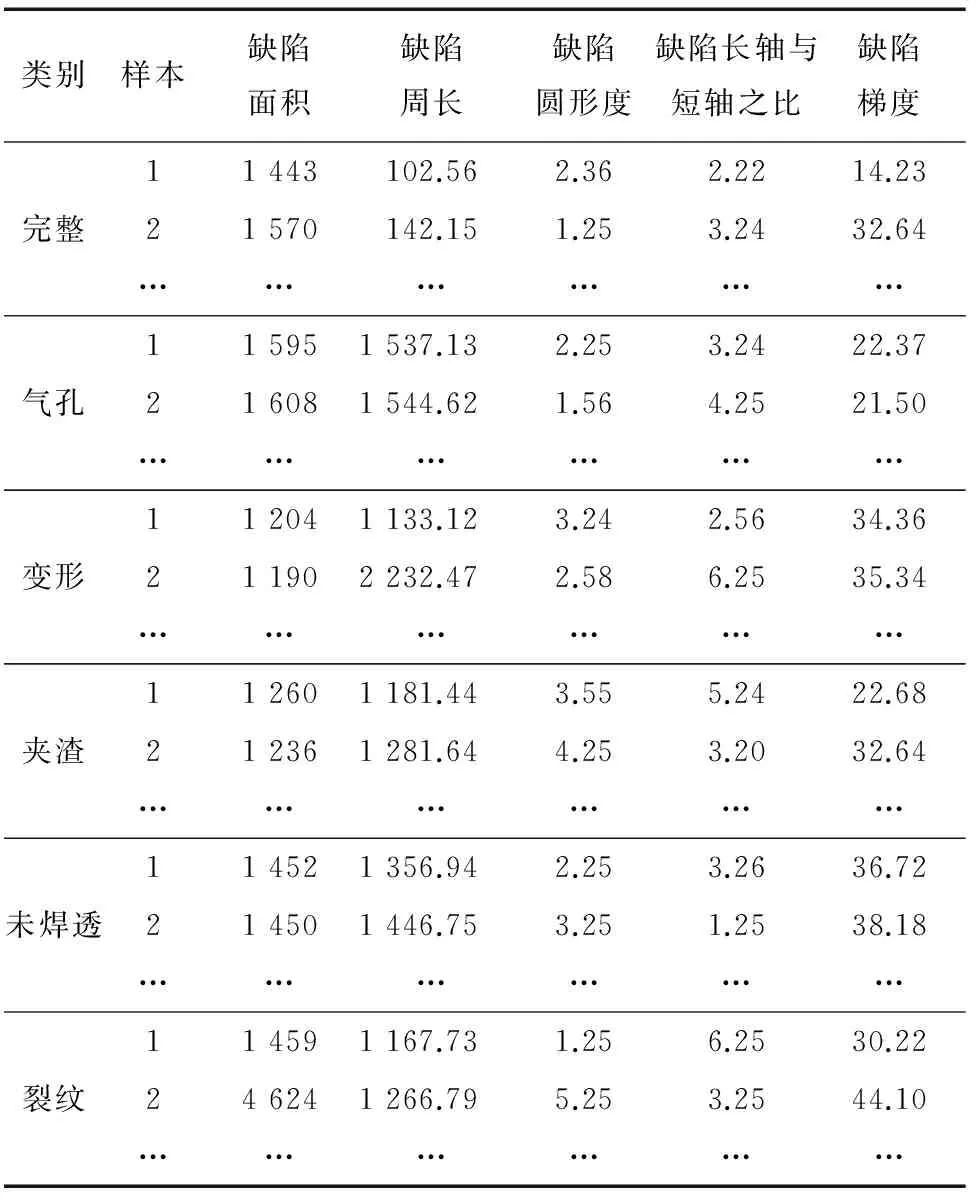
表1 部分图像的几何特征参数
2.4 评价指标
为定量描述所研究检测方法的精确度,计算缺陷识别质量指数Q,Q越大(大于8.0),缺陷识别质量越高,其计算式为
(9)
式中:c为完整性,c=X/Z;e为错误性,e=Y/U;X为实际缺陷样本数目;Z为理论缺陷样本的总数;Y为正确识别的样本数;U为缺陷识别的总样本数。
2.5 检测结果与分析
利用给出的训练样本对分类器进行训练,然后将测试样本特征的参数输入到分类器当中,计算得到的缺陷识别质量指数结果如表2所示。
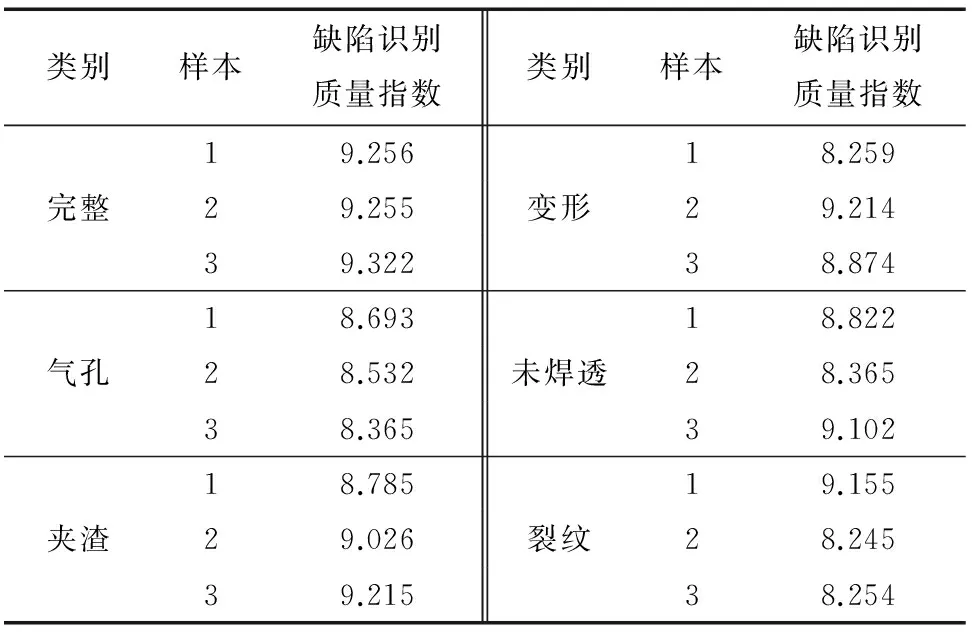
表2 缺陷识别质量指数结果
由表2可以看出,缺陷识别质量指数均大于8.0,说明所研究方法的完整性检测结果较为准确,达到了研究目标。
3 结语
笔者所研究的油气站场管道完整性检测方法主要利用图像处理技术对图像进行处理,基于处理结果,通过分类器实现管道的完整性检测。仿真测试表明,该方法的缺陷识别质量指数大于8.0,能够满足检测精度要求。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
合肥工业大学学报(自然科学版)(2021年11期)2021-12-10
建材发展导向(2021年6期)2021-06-09
集装箱化(2021年1期)2021-04-12
天津医科大学学报(2021年1期)2021-01-26
现代电子技术(2021年1期)2021-01-17
中国信息技术教育(2020年2期)2020-02-02
医学新知(2019年4期)2020-01-02
航空工程进展(2019年4期)2019-11-29
微型电脑应用(2019年1期)2019-01-23
