
土壤水分微波遥感反演算法及应用研究进展
2022-07-12 01:01邓小东王宏全
浙江大学学报(农业与生命科学版) 2022年3期
邓小东,王宏全
(1.浙江大学环境与资源学院农业遥感与信息技术应用研究所,杭州 310058;2.贵州大学矿业学院,贵阳 550025;3.浙江省农业遥感与信息技术重点研究实验室,杭州 310058)
土壤水分作为环境、气候变化的敏感因子,通过改变地表反射率、地表水渗流、蒸散发强度、潜热显热交换、碳循环等传输方式影响地表、大气水分交换和能量循环[1]。土壤水分还是农作物吸收水分的主要来源和土壤肥料溶解、运输的载体,决定着农作物的生长状况[2]。地表土壤水分从获取方式上可分为站点监测、模型模拟及遥感数据反演[3]。基于站点的土壤水分监测受站点分布特征、地表异质性等因素限制,难以进行大范围的监测。对比光学遥感,微波遥感波长较长,受云层和大气的影响较小,对土壤具有一定的穿透性,能够有效弥补光学遥感在土壤水分监测中的不足。近几十年来,已发射的对地观测卫星多数以搭载微波传感器为主,如TMI、SSM/I、ASCAT、SMMR、AMSR-E、AMSR2、SMOS、SMAP 等。随着微波传感器空间分辨率的提高,重访周期的缩短和波束模式、工作频率、极化方式的多样化,微波遥感已成为土壤水分探测中最具发展潜力的途径和方法[4]。
自20 世纪70 年代以来,在星载传感器技术的推动下,微波遥感反演土壤水分经过地面模拟试验、反演算法开发、产品站点验证等的发展历程,形成了一批覆盖全球的地表土壤水分产品。本文从土壤水分微波遥感反演算法、全球尺度土壤水分产品的生产、土壤水分产品的精度提升与尺度研究、土壤水分产品的应用这4 个方面入手,系统地梳理主动微波遥感、被动微波遥感和全球卫星导航系统反射测量(Global Navigation Satellite System Reflectometry,GNSS-R)反演土壤水分的算法、研究现状和应用进展,并对未来微波遥感反演土壤水分的研究趋势提出一些建议。
1 土壤水分微波遥感反演算法
微波遥感反演土壤水分是利用散射计/辐射计测定土壤表面散射/辐射的频谱信息,根据土壤表面对不同波段散射/辐射出的电磁波能量所呈现的后向散射值/像元亮度值与测定的土壤水分之间的线性/非线性关系,构建后向散射系数/辐射亮温度与土壤介电常数、土壤水分三者的数理关系。根据监测原理和技术方法的不同,微波遥感分为主动微波遥感、被动微波遥感和GNSS-R 技术[5]。土壤水分微波遥感反演技术如表1所示。

表1 土壤水分微波遥感反演技术对比Table 1 Comparisons of microwave remote sensing retrieval technologies for soil moisture
1.1 主动微波遥感
一般情况下,在主动微波遥感反演地表土壤水分中,土壤后向散射系数σ0[6]可表达为:

式中:λ、θ、p分别为波长、入射角、极化状态,Mv、Cveg、Rs分别为土壤体积含水量、植被覆盖度及地表粗糙度参数。
主动微波遥感反演土壤水分实际上就是消除植被覆盖、地表粗糙度等因素的影响,建立Mv、Cveg、Rs与σ0之间内在关系的过程,主要分为裸露地表散射模型、植被覆盖地表散射模型。
1.1.1 裸露地表散射模型
考虑粗糙度影响的裸露地表土壤水分反演方法主要采用:1)经验模型;2)半经验模型;3)物理散射模型。
1.1.1.1 经验模型
土壤水分反演经验模型是建立在大量遥感数据和相应站点实测数据的基础上,利用微波散射特性建立后向散射系数与站点观测数据的统计回归方程来达到反演土壤水分的目的。经验模型的可靠性受制于时空匹配的建模数据的质量,可迁移性较差。
1.1.1.2 半经验模型
半经验模型适用于植被覆盖度、地表粗糙度已知或者比较稳定的地表条件,包括Oh 模型、Dubois模型、Shi模型等。
1)Oh 模型。OH[7]对不同粗糙度的地表的散射特性进行多角度观测,建立了后向散射系数、极化比、交叉极化比与土壤水分、地表粗糙度参数的半经验公式。

2)Dubois 模型。DUBOIS 等[8]利用全极化散射计测量值得到了同极化后向散射系数(σ0)与地表介电常数(ε)、地表均方根高度(s)、雷达入射角(θ)等之间的半经验关系:

3)Shi模型。Oh模型和Dubois模型中的地表粗糙度参数只考虑了均方根高度(s),忽略了地表粗糙度谱,不能准确地量化真实地表的后向散射特征。鉴于此,SHI等[9]建立了L波段不同极化后向散射系数模型:


式中:αpp、bpp为p极化状态下的极化幅度;αpp(θ)、bpp(θ)、αvh(θ)、αvh(θ)均为与入射角(θ)有关的经验系数;SR为粗糙度谱。
1.1.1.3 物理散射模型
裸露地表土壤水分反演物理方法是在微波辐射和散射等电磁学理论基础上研究微波辐射和散射经过大气、植被、土壤等介质到传感器接收的交互过程。已有的研究成果中,散射理论模型包括基尔霍夫近似(Kirchhoff approximation,KA)模型、小扰动模型(small perturbation model, SPM)、积分方程模型(integral equation model,IEM)和高级积分方程模型(advanced integral equation model,AIEM)。其中,KA模型包括几何光学模型(geometrical optics model,GOM)、物理光学模型(physical optics model,POM)[22]。
1)几何光学模型(GOM)。对Kirchhoff 模型采用驻留相位近似得到GOM解时,要求ks>2.0,满足此条件的裸露地表后向散射系数为:

2)物理光学模型(POM)。Kirchhoff 模型在标量近似法下得到POM 解,其地表后向散射系数公式如下:
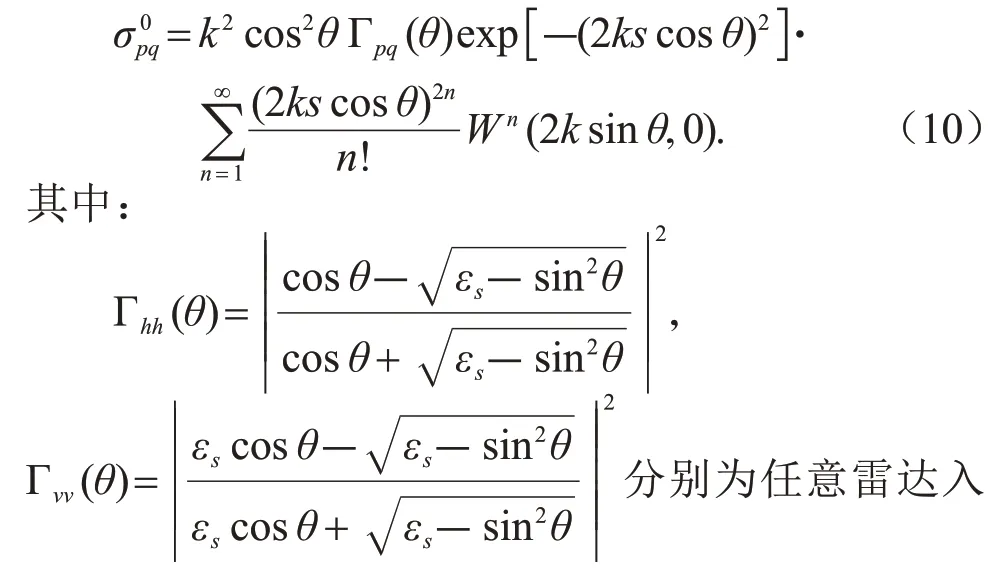
射角下hh极化和vv极化的菲涅耳反射系数;W n(2ksinθ,0)为n阶地表粗糙度功率谱。



4)积分方程模型(IEM)。由于GOM、POM、SPM 适用范围有限,模型之间无连续性,无法适应不同粗糙度的自然地表,因此,FUNG等[10]基于电磁波辐射传输方程建立了能够反演不同粗糙度地表的积分方程模型。IEM水平、垂直极化的后向散射系数表示为:

5)高级积分方程模型(AIEM)。针对处于光滑和粗糙之间的过渡自然地表,CHEN 等[12]恢复了格林函数和其梯度的绝对相位项,推导了更为准确的IEM单次散射项,提出了高级积分方程模型。其地表后向散射系数表示为:

式中:W n(·)为表面自相关函数的n阶傅里叶变换;fqp和Fqp为与菲涅耳反射系数Γh/v相关的函数;各参数具体表达式参见文献[12]。
以上几种模型是针对裸露地表条件建立的,Oh模型和Dubois模型在建模过程中仅考虑了地表均方根高度(s),忽略了地表粗糙度等其他参数,如相关长度和地表自相关函数。Shi模型考虑了粗糙度谱SR对后向散射系数的影响,能够较好地反演地表介电常数。当微波频率超过一定范围,多次散射变得相对重要,而经验、半经验模型无法适用时,需采用物理散射模型。其中,IEM适用的地表粗糙度范围最大,GOM和SPM分别是IEM在微波高频和低频区域的特例;GOM适用于较为粗糙的表面,POM适用于中等粗糙的表面,SPM 适用于较为光滑的表面[23]。主动微波遥感地表散射模型的适用范围如表2 所示。

表2 主动微波遥感地表散射模型的适用范围Table 2 Application ranges of active microwave remote sensing surface scattering model
1.1.2 植被覆盖地表散射模型
1.1.2.1 水云模型(water cloud model,WCM)
1978年,ATTEMA等[13]提出了农作物覆盖下的地表土壤水分反演模型WCM。在WCM中,植被对微波散射的影响简化为2 部分:1)植被层的直接后向散射,见图1 中路径1;2)经过植被层双程衰减之后的剩余散射,见图1 中路径2。因此,WCM 中总后向散射系数表示为:

图1 水云模型散射示意图Fig.1 Schematic diagram of scattering of water cloud model

1.1.2.2 密歇根微波植被散射(Michigan microwave canopy scattering,MIMICS)模型
WCM将植被层视为连续均匀分布的球形散射体,忽略了植被冠层、秆、茎、叶对总后向散射的影响。为了校正植被层对后向散射的影响,ULABY等[14]建立了MIMICS 模型。该模型按照植被冠层、植被茎秆层、植被下垫面地表进行研究,其总的后向散射分为5部分,如图2所示。
MIMICS模型可表示为:


图2 MIMICS模型散射示意图Fig.2 Schematic diagram of scattering of MIMICS model
在农作物覆盖地区,WCM较为简单实用,但其建模过程中将农作物覆盖层视为整体的散射体,忽略了植被和土壤之间的多次散射作用,在植被茎秆较高的农作物(如玉米、高粱等)地区存在较大的误差。MIMICS模型能较为真实地模拟高大植被对微波后向散射的影响,然而该模型将植被覆盖下的地表反射假定为镜面反射,不能客观反映地表状况且模型输入参数较多,难以应用于植被茎秆和冠层没有明显区别的矮小植被覆盖的农业区地表土壤水分反演。
1.2 被动微波遥感
被动微波遥感反演主要依赖于土壤微波辐射亮温度与土壤水分强相关的特性,通过用辐射计接收土壤本身的微波辐射亮温度来反演土壤水分。土壤水分、植被覆盖、地表粗糙度是影响被动微波传感器获取辐射亮温度的关键要素。土壤水分被动微波遥感反演模型分为:1)裸露地表粗糙度模型;2)植被覆盖地表模型。
1.2.1 裸露地表粗糙度模型
土壤水分变化将改变土壤的介电特性,进而影响土壤-空气界面的能量辐射。目前,裸露地表粗糙度模型主要有Q/H[24]、、模型,它们的表达式分别为:

Hp模型是在Q/H模型基础上假设Q=0得到的,此时,参数Q对地表反射率的影响较小,适用于L波段的低频波段。Qp模型是在Q/H模型基础上假设Hp=1 得到的,适用于大入射角、高频波段。Q/H模型考虑了地表粗糙度参数Q和H的双重影响,适用范围最广。
1.2.2 植被覆盖地表模型
对于植被覆盖的地表,植被层消减了土壤的微波辐射,增加了自身辐射。在植被覆盖的被动微波遥感中,传感器接收到的辐射亮温度来源于土壤、植被和大气3 层介质中的全部辐射[27]:1)植被的直接辐射;2)由土壤反射和植被冠层削弱的植被辐射;3)由冠层削弱的土壤辐射;4)大气的上行辐射;5)由土壤反射和植被冠层削弱的大气下行辐射。各介质的辐射能量及其相互作用如图3所示。根据3层介质辐射传输过程建立的τ-ω模型[28]可以表示为:

图3 τ-ω模型辐射示意图Fig.3 Schematic diagram of radiation of τ-ω model

式中:Tbp为地表总辐射亮温度,Tu和Td分别为大气上行、下行辐射亮温度,Ts为地表裸土的物理温度,Tc为地表植被冠层的物理温度;τap为大气的光学厚度,τp为植被冠层的光学厚度,ωp为植被冠层的单次反照率,三者与极化相关;rp为地表裸土粗糙表面p极化微波反射率。
τ-ω模型考虑了土壤、植被和大气3 层介质对微波辐射传输的影响,建模过程中引入了大气、植被的结构和形态、微波的频率和极化、地表温度和粗糙度等参数,模型比较稳健。因此,τ-ω模型是当前土壤水分被动微波遥感反演算法的基础。
1.3 GNSS-R 技术
作为发射源和接收端在不同平台上的特殊双站雷达或多站雷达,GNSS-R 技术比传统单站雷达技术能提供更加丰富的散射信息。GNSS-R技术综合了时空分辨率高、成本较低等优势,提供了一种范围广、速度快且可以长期动态监测土壤水分的微波遥感手段。1993年,MARTÍN-NEIRA[29]首次利用全球定位系统(global positioning system,GPS)接收到的直射信号和地表反射信号之间的延迟来计算海洋高度。理论上,GNSS-R 收发分置雷达主要根据“反射率-介电常数-土壤湿度”解算关系建立土壤湿度反演模型,根据信号接收方式[30]的不同可以分为:1)单天线地基GNSS-R 技术(图4A);2)多天线地基GNSS-R技术(图4B);3)机载GNSS-R技术(图4C);4)星载GNSS-R技术(图4D)。
1.3.1 单天线地基GNSS-R 技术
单天线地基GNSS-R 技术通过普通导航定位用途的GNSS 天线或极化天线接收直射、反射、衍射信号叠加的多路径干涉信号信噪比(signal-noise ratio,SNR),从而建立反射分量的振幅、相位、频率等特征参数与土壤水分的关系模型。
SNR观测值与信号振幅存在如下关系[19]:)

式中:Ac为合成信号的振幅;Ad、Am分别为图4A 中GNSS 天线接收到的直射信号和反射信号的振幅,且Ad≫Am。

图4 土壤水分GNSS-R反演技术Fig.4 GNSS-R retrieval technology of soil moisture
1.3.2 多天线地基GNSS-R 技术
多天线地基GNSS-R 技术利用多个专门研制的GNSS-R接收天线分别接收直射和反射信号,在菲涅耳假设下,反射信号可表示为极化矩阵与入射信号的乘积[20],从而构建GNSS-R反射信号、陆地复介电常数、土壤水分三者的关系模型。

该极化矩阵中相关元素的表达式为:

1.3.3 星载GNSS-R 技术
导航卫星和搭载在低轨卫星上的接收机处于相对运动状态,因而产生多普勒频移。星载GNSSR 观测量主要是反射信号生成的时延多普勒图(delay-Doppler map,DDM)。反射信号的相关功率需要从多普勒频移和时延[21]2方面考虑:

式中:Ti为相干积分时间;Pt为卫星发射功率;Gt为卫星发射天线增益;Gr为接收机的增益;Rt和Rr分别为卫星发射机、接收机到镜面反射点的距离;τ为时延;f为多普勒频移;Λ为自相关函数;sinc(f)为多普勒频移函数;σ0为A单位面积的散射系数。
2 土壤水分微波遥感反演算法研究进展和应用
土壤水分微波遥感反演算法的研究进展和应用主要集中在5 个方面:1)主动微波遥感反演土壤水分;2)被动微波遥感反演土壤水分;3)GNSS-R技术反演土壤水分;4)土壤水分产品及质量检验;5)土壤水分产品在农业、气候、水文学中的综合应用。
2.1 主动微波遥感反演土壤水分
自20 世纪80 年代起,ULABY 等[31]通过大量实验研究了土壤水分和雷达入射角、频率等参数的关系,建立了后向散射系数、土壤介电常数和地表粗糙度三者的经验模型,得出了相同地表条件下当土壤水分较低时,雷达波速的穿透多、反射少,表现在雷达图像上即为土壤介电常数越高像元亮度越强的结论,奠定了主动微波遥感反演土壤水分的理论基础。BAGHDADI 等[32]根据高级合成孔径雷达(advanced synthetic aperture radar,ASAR)数据建立了多角度、多极化的指数经验模型。ZRIBI 等[33]建立了不同入射角下后向散射系数之差与地表综合粗糙度(均方根高度的平方s2与相关长度l的比值)的土壤水分反演经验模型。
XING 等[34]基于Dubois 模 型和改进的WCM 消除了植被冠层引起的后向散射效应,使用SAR数据反演处于生长季节的大豆、小麦农田表层的土壤水分。YANG 等[35]将扩展AIEM 中引入的误差函数的一阶近似扩展到二阶近似,以适应更大粗糙度的地表,同时通过引入带限指数功率谱密度建立了一种反射系数与平均表面曲率、频率和介电常数的新型反射系数转换模型,降低了AIEM中补域项σcqp的影响。WEIß 等[36]利用小麦农田的实测数据评估了Oh、Dubois、WCM、IEM 的反演优势以及不同模型组合在麦田vv极化雷达后向散射模拟中的优缺点。WAGNER 等[37]提 出 的TU-WIEN 算 法 将SCAT/ASCAT散射计多角度、长期连续观测的微波后向散射观测值统一到标准参考角40°下,根据同一地点的散射计观测数据,利用变化监测算法估算随时间变化的模型参数,以消除地表植被的影响,最后将标准化且消除植被影响的微波后向散射系数值与干湿参考线比较以确定地表干湿程度。TU-WIEN算法同时考虑了复杂地表的粗糙度和地表植被覆盖,通过利用长时间的海量卫星观测数据建模克服了物理散射模型在大尺度反演的有效性和参数化方面的缺陷,增强了土壤水分反演的稳定性。SMAP主动微波遥感反演土壤水分是基于雷达数据和辅助数据,先采用多通道时间序列算法求得单个像元后向散射系数的均方根高度,再利用均方根高度和介电常数模拟后向散射系数,最后通过最小化代价函数最优解对应的介电常数来推算土壤水分[38]。
2.2 被动微波遥感反演土壤水分
针对单频率单极化输出土壤水分的微波辐射计,JACKSON[15]提出了单通道算法(single channel algorithm,SCA)来反演土壤水分。该算法采用τ-ω模型估算植被影响和Q/H模型计算地表粗糙度影响,并将土壤纹理信息引入Dobson介电常数模型,以解算土壤水分。SCA 中对应的每个像元的输入参数均涉及植被类型、植被含水量、地表粗糙度参数、土壤类型、土壤容重等大量辅助数据,唯一的输出是土壤水分。针对用AMSR-E 的C/X 波段多极化亮温度观测值来反演土壤水分,NJOKU 等[16]将美国国家冰雪数据中心(National Snow and Ice Data Center,NSIDC)发布的算法选择τ-ω模型作为正向模型,通过迭代的方法使正向模型计算的亮温度值与传感器观测的亮温度值的拟合误差最小,从而实现土壤水分反演;KOIKE 等[17]提出的JAXA 反演算法采用正向辐射传输方程生成不同地表条件下的多频率、多极化亮温度数据,通过建立相应的土壤水分查找表来获取土壤水分反演值。美国国家航空航天局和阿姆斯特丹自由大学共同提出的地表参数反演模型(land parameter retrieval model,LPRM)[18]根据多波段AMSR-E 亮温度值获取相应的亮温度极化差异比,以参数化表达植被光学厚度的影响。LPRM 是一个多参量反演模型,可以同时反演土壤水分、植被含水量以及土壤、植被冠层的温度。
SMOS卫星中的L波段多角度二维合成孔径微波辐射计的全球土壤水分反演主要采用τ-ω模型估算植被影响,Q/H 模型消除地表粗糙度的影响,Mironov模型计算土壤介电常数,并基于L波段生物层微波发射(L-band microwave emission of bio‑sphere,L-MEB)模型的多角度迭代反演算法构建模拟亮温度和观测亮温度的代价函数最小值,达到同时求解土壤水分和植被光学厚度的目的[39]。SMAP被动微波遥感反演土壤水分采用SCA 作为核心算法,首先消除植被冠层和地表粗糙度的影响,其次对由亮温度转化来的地表发射率进行校正,利用菲涅耳方程确定介电常数,最后通过Mironov 模型求解土壤水分[40]。
2.3 GNSS-R 技术反演土壤水分
针对单天线GNSS-R 技术反演土壤水分的研究,徐晓悦等[41]设计了Lomb Scargle 算法来直接分离GPS直射和反射信号,从而提取多路径反射信号的时频特征,结果表明反射信号频谱特征与实测数据具有较强的相关性。YANG等[42]利用北斗导航卫星的信噪比数据,证明了北斗导航卫星同样适用于土壤水分、植被含水量的反演。
严颂华等[43]采用配置右旋天线和左旋天线的GNSS-R 接收机开展农田土壤水分测定实验,用土壤湿度计获取的实测值验证了GNSS-R 反演土壤水分的有效性。ZENG 等[44]利用AIEM 研究了L 波段的双基地雷达对裸露地表土壤水分和粗糙度的响应,采用土壤水分敏感性指数对极化散射系数和角散射系数及其组合进行评估,结果表明:双基地雷达观测降低了表面粗糙度的影响,保持了对土壤水分响应的良好敏感性;与单基地雷达模式相比,双基雷达模式的灵敏度更高。LIU 等[45]基于AIEM从粗糙表面双基地雷达散射的角度特征(倾角、散射强度和角宽)出发,在有限范围内探索了Brewster散射及其在角行为中的作用,结果表明:角度特征与表面粗糙度参数和散射几何条件密切相关。对于较小的散射角,倾角和角宽与表面粗糙度无关,当入射角和散射角超过50°时,倾角宽度仅响应均方根高度,倾角和散射强度对均方根高度和介电常数敏感。ZENG等[46]使用全局灵敏度分析方法——拓展傅里叶幅度敏感性检验(extended Fourier amplitude sensitivity test, EFAST)算法探讨了L 波段裸露地表土壤水分反演的最佳双基地雷达配置,并在利用AIEM 模拟涵盖广泛几何参数和地表粗糙度条件的双基地散射的基础上,使用EFAST量化了双基地雷达信号对土壤水分和表面粗糙度的敏感性以及参数之间的相互作用,结果表明:在双基地雷达散射中vv极化对土壤水分的敏感性明显高于hh极化,特别是在大入射角下;在vv极化中,随着入射角的增大,土壤水分的敏感区域会正向偏移,特别是在小散射方位角和大散射方位角处;而对于hh极化,随着入射角的增大,土壤水分的敏感区域逐渐反向移动,同时,考虑敏感强度和参数交互作用,建议采用中等入射角(如40°)来反演土壤水分。BROGIONI等[47]采用AIEM和二阶SPM对非相干散射场进行了模拟,研究了双基地散射系数对土壤含水量和地表粗糙度的敏感性,结果表明,双基地雷达观测或者与单基地雷达观测相结合的土壤水分反演质量相对于经典的单基地雷达反演有明显的改进。
针对基于机载GNSS-R 多天线模式的土壤水分反演研究,MASTERS等[48]在SMEX02(soil moisture experiments in 2002)中证明了反射信号强度与土壤水分时空相关。在星载GNSS-R 的土壤水分反演研究方面,CHEW 等[49]利用英国近地轨道卫星(TDS-1)的观测数据发现星载GNSS-R双基地雷达接收机具备遥感土壤水分变化的能力。此外,CHEW等[50]研究表明,基于旋风全球卫星导航系统(Cyclone Global Navigation Satellite System,CYGNSS)观测到的反射率与SMAP 测得的土壤水分强相关,可将CYGNSS 测得的反射率转化为土壤水分估值。YAN 等[51]考虑大气、植被覆盖和地表粗糙度的影响,利用SMAP 获得的植被光学厚度τ数据和CYGNSS获取的反射率Γ数据建立经验模型并反演了泛热带土壤水分。
2.4 土壤水分产品及质量检验
随着对地观测卫星数目的增加,覆盖全球的微波遥感土壤水分产品不断丰富,主要包括SMOS、SMAP、ASCAT、ESA-CCI、CYGNSS 等全球尺度土壤水分产品。表3列出了全球主要微波遥感土壤水分产品的主要特征。其中,SMAP 卫星同时搭载L波段的主动雷达和被动辐射计开展地面观测,主动雷达观测地表的空间分辨率为3 km,被动辐射计观测地表的空间分辨率为36 km,但是主动雷达系统发射3 个月后出现故障;之后出现的SMAP/Sentinel-1主动土壤水分产品是融合SMAP-L波段辐射计获取的亮温度与C 波段Sentinel 的后向散射系数而得到的。综合多种主被动微波遥感土壤水分产品,欧洲航天局(European Space Agency,ESA)在气候变化倡议(Climate Change Initiative,CCI)中发布了主动微波遥感、被动微波遥感和主被动微波遥感融合的3 种数据集。2021 年,ESA 发布的v06.1版本的最新数据集中,主动微波遥感数据集基于散射计获取的土壤水分数据[AMI-WS 和ASCAT(Metop-A 和Metop-B)]合成输出;被动微波遥感数 据 集 的 合 成 数 据 包 括SMMR、SSM/I、TMI、AMSR-E、WindSat、SMOS、AMSR2、SMAP、FY-3B和GPM土壤水分产品。2020年,CHEW等[52]在JPL官网上发布了CYGNSS土壤水分产品,其覆盖范围为泛热带地区38°N—38°S,164°E—135°W,空间分辨率为36 km×36 km,时间分辨率为6 h。

表3 全球主要微波遥感土壤水分产品特征Table 3 Characteristics of main global remote sensing soil moisture products
2005年,李小文院士牵头组织的国家重点基础研究发展计划(973 计划)重大项目“陆表生态环境要素主被动遥感协同反演理论与方法”在流域尺度上开展综合遥感试验,以水循环为主要研究对象,将微波遥感和光学遥感相结合,通过调查监测土壤水分等建立了一个开放的试验平台,生产了多套多尺度、高分辨率的土壤水分数据集。YAO 等[53]以AMSR-E/2获取的亮温度作为输入数据,采用神经网络反演算法生成了2002—2020年的全球时空连续一致的地表土壤水分数据集。YUAN等[54]采用稀疏站点观测值训练的广义回归神经网络构建了一种点、面协同的地理智能学习方法,用于估计区域表层土壤水分。CHEN等[55]将遥感数据与深度学习算法相结 合,融 合AMSR-E、WindSat、TMI、ASCAT、SMOS、FY 和AMSR2 多种主被动微波遥感数据来反演土壤水分并统一校正至SMAP 同等精度水平,生产了2003—2018 年空间分辨率为0.1°,时间分辨率为10 d 的遥感土壤水分产品。这些人工智能机器学习算法无需先验物理知识可直接从数据间本质关系中反演得到地表土壤水分,反演结果在时空尺度上可以与数理模型相媲美,且效率更高。目前,这些数据集已经实现了开放共享,可以在国家青藏高原数据中心(http://data.tpdc.ac.cn/zh-hans/)免费下载。
微波遥感土壤水分产品的真实性检验对于算法改进及产品应用极为重要。随着全球土壤水分观测网的布设,遥感卫星像素难以匹配地面站点进行可靠性评估的难题得到了有效缓解。目前,国际土壤水分网络(International Soil Moisture Network,ISMN)中已有超过71 个地面土壤水分观测网络、2 843余个观测站点面向用户,免费提供全球长期地面土壤水分站点数据(https://ismn.geo.tuwien.ac.at/en/)。在此背景下,ZENG 等[56]、MA 等[57]、ZHU 等[58]利用ISMN 多个地面站点的观测数据展开了地区、全球尺度的多种微波遥感土壤水分产品的评估工作,全面分析了地表温度、粗糙度、植被覆盖、地表空间异质性以及气候带对土壤水分产品精度的影响。
2.5 土壤水分产品在农业、气候、水文学中的综合应用
大尺度下的全球被动微波遥感土壤水分产品的空间分辨率较低(25~36 km),不能满足小尺度或者小区域范围内地表蒸散发模型、陆面过程模型对土壤水分空间分辨率的要求。此外,从产品质量验证的角度出发,对土壤水分尺度转换进行研究能够更好地满足地面站点数据与遥感产品的精确空间匹配的要求。雷芳妮[59]以黑河上游流域为研究对象,利用SWAT 半分布式水文模型和集合卡尔曼平滑算法对土壤水分观测数据进行同化研究,揭示了空间异质水文模型输入数据对于同化效果的影响。师春香[60]建立了基于陆面过程模型和集合卡尔曼滤波算法的土壤水分同化框架并将其应用于陆面土壤水分同化试验,实现了微波遥感和模式模拟的同化融合,获取了中国区域时空连续的高精度土壤水分数据。此外,土壤水分的反演模型也在不断优化,尤其改进了对植被结构动态性的建模。
WANG 等[61]基于多时相RADAR SAT-2 数据集,利用C 波段SAR 的极化分解和随机森林、人工神经网络、支持向量机回归和K-近邻算法分离植被和土壤散射分量,从而反演农作物物候期,达到作物物候学助力农业决策以提高作物产量的目标。吴学睿等[62]在一阶辐射传输方程MIMICS模型的基础上,将模型中的树干层去掉,保留树冠层和地表间的散射机制,提出了适用于农作物的双站Bi-MIMICS模型,该模型模拟分析了GNSS-R镜像散射系数与农作物生物量之间的关系,表明GNSS-R技术可以用来监测农作物长势。
3 小结与展望
微波遥感对地观测能力具有穿透性较强,算法和模型能够进行前向模拟和后向反演的优点。微波遥感星载观测与反演算法和模型相辅相成,共同提升了人们对全球气候变暖背景下水循环科学规律的认识能力,从而解决土壤水分与陆面-海洋-大气间水循环过程耦合等一系列重大科学问题,并为农作物生长灌溉施肥决策、水资源合理利用、干旱灾害预警等一系列国家重大需求提供关键科技支撑。
微波遥感反演土壤水分算法在辐射传输方程、输入输出数据集等方面存在以下问题:1)辐射传输过程复杂,不同介质的数理模型各异,未知参数众多,各模型都有一定的适用范围;2)模型反演精度取决于建模参数的数量及准确度,但是微波遥感成像环境多变,实现各参数实时准确测定较困难;3)尽管基于数据驱动的机器学习算法能得到较好的反演结果,但缺乏对土壤水分反演过程的机制解释且稳健性差,受到不少专家学者的质疑。因此,在今后的土壤水分反演算法研究中还需要进一步思考以下问题:1)微波遥感辐射传输模型涉及大气、植被、土壤等多层介质的众多要素,如何对模型中涉及的关键要素进行准确量化,特别是对不同生长周期下的植被特征和地表粗糙度参数等的精确表达;2)微波遥感传感器对物理参数的敏感度不同,如何建立适用于多波段、多极化、多传感器的主被动微波遥感融合的土壤水分反演算法;3)土壤水分反演算法依赖于传感器获取的特定时间和特定空间下的地表、植被、大气等的物理参数,由于传感器波段、辐射性能、成像时间的差异,各模型参数瞬息万变,如何破解土壤水分反演算法的不确定性,构建时空连续、物理性质一致的土壤水分反演模型将是研究的难点,如何发展数据驱动和物理模型相结合(既可以解释反演机制又可实现高效快捷计算)的大数据遥感信息模型将是新的研究方向。
尽管全球多个微波遥感卫星生成了多种区域、全球尺度的近实时土壤水分产品,但由于高精度、高时空一致性的土壤水分系统性综合观测能力的缺失,土壤水分反演参数的严重不足已成为制约微波遥感反演土壤水分研究(从观测到模型)发展的关键因素。要解决这些问题,建议从以下2 方面考虑:
1)进一步研究土壤水分反演过程中土壤、植被、大气耦合作用的机制,特别是研究土壤水分在陆表水气循环过程中的响应及反馈机制。
2)进一步研究主被动协同、通导遥一体化的反演理论和方法,发展同步观测土壤水分、植被含水量、大气降水等新型微波遥感探测技术,将同步观测值和土壤水分反演的改进模型有机结合,以解决土壤水分反演过程中关键要素的时空一致性这一重要难题,形成对大气、植被、地表温度和粗糙度等其他环境影响因素更高精度的观测能力和综合校正能力。
猜你喜欢
农业工程学报(2022年10期)2022-08-22
云南大学学报(自然科学版)(2022年4期)2022-08-03
农业工程学报(2022年5期)2022-06-22
民族文汇(2022年23期)2022-06-10
水土保持学报(2022年3期)2022-05-26
航天电子对抗(2022年2期)2022-05-24
北京航空航天大学学报(2021年9期)2021-11-02
科教新报(2021年15期)2021-05-12
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
