喷油自学习策略在发动机怠速控制中的应用
2022-07-12 05:42唐为义李权李树宇
内燃机与动力装置 2022年3期
唐为义,李权,李树宇
奇瑞汽车股份有限公司, 安徽 芜湖 241009
0 引言
怠速工况下柴油机进气量少,缸内压力小,压缩温度低,混合气不均匀, 燃烧不充分,排放性能差。传统的降低冷起动阶段怠速排放的标定策略主要有减少起动喷油量、提高发动机暖机怠速转速、改变点火效率、催化剂快速起燃等[1-2]。但是减少喷油可能导致混合气过稀,高转速下降低点火效率可能导致燃烧恶化,这使得发动机怠速工况的抗干扰能力和鲁棒性降低。此外,工业化产品的质量稳定性,燃油品质特性,发动机应用环境变化如机体温度、机油黏度特性,地域海拔特征等,也会对怠速时发动机的稳定性产生影响。在减少起动怠速喷油情况下,使空燃比更好地与怠速转速相匹配对降低冷机怠速排放尤为重要。
诸多学者从不同维度对怠速控制方法、怠速燃烧稳定性和怠速评价开展了一系列的研究。文献[3-7]主要研究模糊控制、模糊比例积分微分 (proportional integral differential,PID)控制、模糊PID-Smith控制等方法在怠速稳定控制中的应用,结果表明,采用模糊控制能有效改善汽车发动机的怠速运转稳定性和鲁棒性;文献[8]提出了关于发动机怠速稳定性的动态矩阵预测控制算法,并建立了预测控制模型,试验表明,该预测控制方法能够较好地克服各种不确定性因素和复杂变化对怠速稳定性的影响;文献[9]通过优化进、排气凸轮型线及相位,调整发动机电控参数,改善发动机的怠速燃烧稳定性;文献[10]针对怠速工况中经常出现随机性转速波动的现象,提出了一种基于“3σ”原则的方法评估发动机不同怠速工况下的转速波动范围;文献[11-12]从转矩的角度研究分析怠速控制,结果表明,基于转矩的发动机怠速控制方式能够获得良好的控制效果, 发动机实际转速能够很好地跟随目标转速。
为提高怠速抗干扰能力,降低冷机怠速排放,本文中提出一种基于发动机怠速转速波动的喷油自学习控制策略,以降低怠速工况的转速波动,通过实车测试验证喷油自学习控制策略的效果,对测试结果进行对比分析。
1 怠速控制
1.1 PID控制原理
PID控制是应用最为广泛的一种控制算法。由于来自外界的各种干扰不断产生,需连续调节各参数,使控制对象恒定稳定。连续PID控制系统的原理示意如图1所示,其数学模型为:
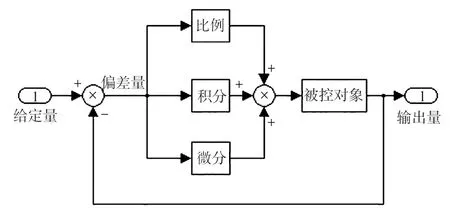
图1 PID控制原理
式中:KP为比例增益;KI为积分时间常数;KD为微分时间常数;u(t)为控制器输出量;e(t)为给定量与实际测量的差,是调节的输入函数。
1.2 怠速PID控制原理
怠速PID控制原理如图2所示。怠速PID控制以目标怠速转速为导向,一旦监测到发动机转速脱离目标怠速,系统自动调整相关参数,使转速回到目标怠速转速。电子控制单元(electronic control unit,ECU)依据各相关传感器的输入信号,判定最终输出目标怠速转速,并将传感器感知的发动机实际怠速转速与目标转速进行比较,根据二者偏差确定目标转速的控制量,驱动控制进气量的执行机构以及改变点火效能,稳定怠速转速。
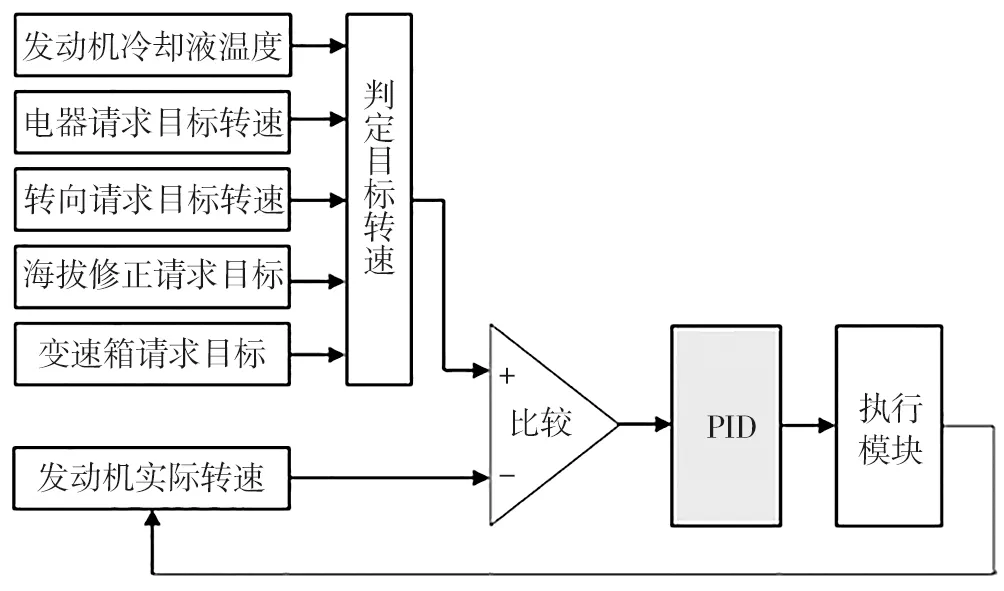
图2 怠速PID控制示意图
除了在发动机硬件系统采用的部分优化方案以外,怠速PID控制均受制于调节范围的限制,如果系统偏差超出怠速控制调节范围,多数方案不能最优化解决问题。产品开发过程中,通常采用试凑法对PID各参数进行标定,但这种传统方法一定程度上受限于极端工况下的怠速气路控制和活路控制调节范围,同时也受限于标定样机或样车的样本量,难以实现标定结果的全生产线最优覆盖。如果在达到PID调节范围极限的情况下仍无法稳定怠速,则过大的转速波动必将被感知,影响产品质量。
2 喷油自学习策略
发动机空燃比控制分为开环控制和闭环控制,快速进入闭环控制可精确控制空燃比,降低怠速排放。本文中采用两点式氧传感器进行反馈检测实现空燃比闭环控制,空燃比可通过混合气中氧离子浓度表示,并在氧传感器端以电压信号反馈至ECU,ECU基于目标设定的中值阈值辨识当前的空燃比,进行喷油量闭环调节。这一过程的实现受制于氧传感器露点特性,只有在达到氧传感器露点温度之后才能全功率加热快速进入空燃比闭环控制。ECU辨识传感器露点温度,判断是否可进入空燃比闭环控制,防止暖机过程中水蒸气在陶瓷体端冷凝导致氧传感器陶瓷体炸裂。在冷起动及催化剂起燃工况,尤其在极端低温环境下,燃油雾化较差,摩擦阻力较大,相当一段时间内无法进行空燃比闭环调节,开环控制下混合气偏稀时易导致怠速转速波动。
与传统的PID控制相比,基于怠速转速波动的喷油自学习策略增加基于转速波动的喷油调节环节,在监测转速波动形态的基础上对喷油脉宽进行修正调节,精确控制实际空燃比,改善燃烧,喷油自学习怠速控制示意图如图3所示。

图3 基于转速波动的喷油自学习怠速控制示意图
ECU根据曲轴位置传感器信号辨识发动机实际转速,判断其与设定目标转速的速差,该速差超出设定范围后,认为此时混合气偏稀,ECU对怠速喷油脉宽进行调节,使空燃比保持在稳定燃烧区间。基于发动机控制单元监测的歧管进气量、喷油器流量特性、电压修正等计算得到基础喷油脉宽u(t)。为确保实际燃烧净转矩输出与摩擦阻力平衡,实现更稳定的燃烧,自学习策略采取混合气加浓控制,即PID调节以转速速差e(t)为输入、喷油脉宽增量Δ(u(t))为输出,设定增量调节阈值,确保PID调节幅度可控,防止喷油脉宽过度调节导致排放恶化。
基于转速波动的喷油自学习策略算法在线计算程序框图如图4所示。从发动机ECU的控制流程来看,ECU接收发动机曲轴位置的可信信号,初步辨识当前怠速工况下转速波动,并将转速波动幅值与设定的自学习调节阈值进行比较,当转速波动超出设定的阈值后,触发喷油自学习调节;同时,为降低燃油过浓带来的燃烧不良及排放超标风险,在喷油调节过程中赋予一定的自学习喷油调节范围的限值设定,此限制可在实际的标定工作中优化,保证燃烧稳定与排放物水平最优。ECU识别到氧传感器正常工作以后,自动退出当前喷油自学习调节,进入空燃比闭环控制调节,同时将此次自学习结果在ECU下电后写入其存储器中,并在下次工作循环中调用。
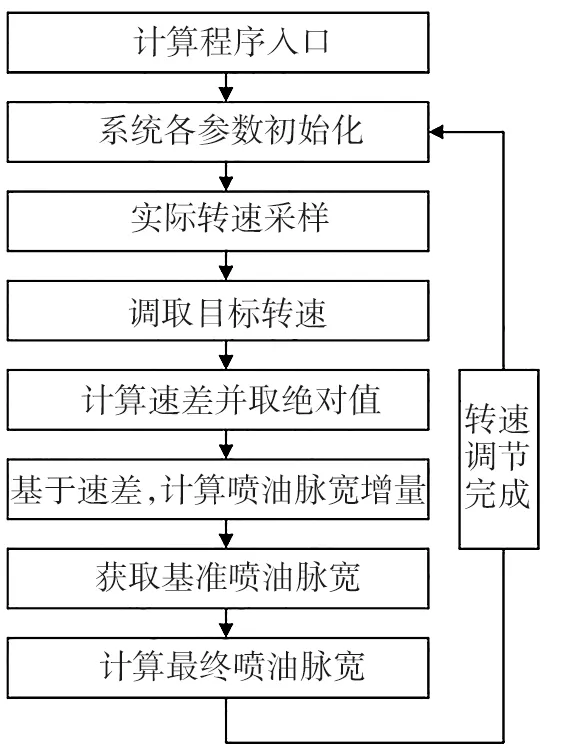
图4 基于怠速转速波动的喷油自学习算法框图
3 试验方法及结果分析
3.1 试验方法
进行实车对比试验,验证基于怠速转速波动的喷油自学习策略对稳定怠速转速的效果。为确保试验结果的可比性,试验采用新下线样车,所有样车零部件状态一致,零行驶里程,加注同量、同批次燃油,在相同环境中静置不少于8 h,冷起动条件相同。
3.2 无喷油自学习策略
对样本车辆进行原状态测试,在设定的环境边界下监测起动后怠速稳定性状态。结果表明,不采用喷油自学习策略时,部分车辆的冷起动怠速转速波动过大。随机抽取2辆样车A、B,冷起动后空燃比开环控制下的怠速转速波动情况如图5所示。由图5可知,在冷起动暖机过程的前500 s内,转速稳定性较好,但在500~900 s,两车的转速逐渐发散,样车A的转速波动过大,转速波动超过±50 r/min。
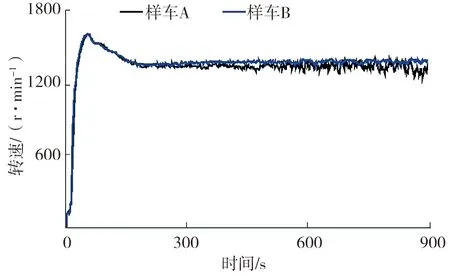
图5 无喷油自学习策略的起动怠速转速情况
分析波动剧烈区域(500~900 s)以目标怠速为中心的怠速波动频次分布,结果如图6所示,对应的过量空气系数曲线如图7所示。
由图6可知,样车B原始状态的怠速转速波动较小,优于样车A。由图7可知,在转速波动较大区域,实际的过量空气系数大于1,混合气偏稀,导致实际燃烧滞燃期变长,实际燃烧转矩偏小,不足以平衡摩擦阻力,进而引发转速波动;极端情况下可造成个别气缸无法正常燃烧,引发单个或多个气缸失火。
3.3 喷油自学习策略
保持测试边界一致,采用喷油自学习策略,以转速波动为输入量,调整喷油脉宽输出,实时调整实际空燃比,消除开环空燃比控制下的喷油控制弊端,进行起动后怠速稳定状态监测。采用喷油自学习策略后,车辆起动后暖机过程的怠速转速曲线、500~900 s内怠速转速波动频次分布、暖机过程过量空气系数曲线如图8~10所示。

图8 喷油自学习策略暖机过程怠速转速曲线 图9 喷油自学习策略500~900 s内怠速转速波动频次分布
由图8可知,采用喷油自学习策略后,暖机过程样车A、B的怠速转速稳定且收敛,一致性较好。由图9可知,采用喷油自学习策略后,怠速波动较小,100%的波动在±20 r/min以内,95%的波动集中在±15 r/min。由图10可知,采用喷油自学习策略后,实际过量空气系数与目标过量空气系数的偏差不超过±3%,表明实际空燃比可很好地追随目标空燃比,从而保证燃烧的稳定性,避免失火,减少转速异常波动,也有益于降低排放。

图10 喷油自学习策略暖机过程过量空气系数曲线
4 结论
1)发动机起动后空燃比开环控制阶段,受产品制造过程一致性分布的影响,空燃比控制的鲁棒性较差,缸内混合气偏稀,燃烧稳定性较差,转速波动较大。
2)采用喷油自学习控制策略后,基于转速波动实时进行喷油策略调整,空燃比收敛,燃烧稳定,转速波动较小,波动控制在±15 r/min以内,满足工业化生产的要求。
3)采用喷油自学习策略,可以减少怠速转速异常波动的风险。由于过浓或过稀的混合气都不利于正常燃烧,后续研究应进一步优化控制策略及改善排放水平的增益。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
小型内燃机与车辆技术(2022年3期)2022-08-11
舰船科学技术(2022年11期)2022-07-15
内燃机学报(2022年4期)2022-07-13
汽车实用技术(2022年10期)2022-06-09
小型内燃机与车辆技术(2022年1期)2022-05-12
科学与生活(2021年23期)2021-12-06
汽车维护与修理(2021年7期)2021-11-03
锦绣·上旬刊(2019年5期)2019-10-21
中国科技纵横(2017年13期)2017-08-09