水下油气设备三维重心测量研究
2022-07-11 08:33吕英创孙繁荣任广新郝高正汤凯音王路
石油和化工设备 2022年5期
吕英创 孙繁荣 任广新 郝高正 汤凯音 王路
(海洋石油工程股份有限公司 天津 300452)
1 引言
海上工况恶劣,风险巨大。海上安装作业稍有不慎,会造成极大损失,带来严重后果。设备实际重心对海上安装具有指导意义,因此实际重心测量具有重要意义。《称重原理——力矩平衡和静不定原理》对重心测量理论进行了阐述1。以往工程项目水下管线终端(pipeline end of termination,简称PLET)只测量二维重心。《海洋石油钻井平台的称重》中描述了二维重心测量2。三维重心在航空等研究应用较多,《飞机重量及重心测量系统的应用及发展》和《飞机重量重心测量技术现状与发展趋势》对飞机重心测量进行了描述3,4,“In-Flight Estimation of Center of Gravity Position Using All-Accelerometers”描述了航空估测重心位置的方法5,“Simultaneous measurement of body center of pressure and center of gravity during upright stance. Part I”描述了直立时重心和压力中心测量方法6,在水下PLET尚未发现相关研究应用。南海某项目要求对水下刚悬链立管PLET进行三维重心测量。基于此种现状,开展水下PLET三维重心测量研究应用。
2 三维重心测量研究
以往海洋工程项目二维重心测量(如平台、组块、水下管汇、水下PLET等)通常采用力矩平衡(当物体处于平衡状态时,力对同一轴矩之和为零。)。这些设备底面一般处于平面内,将其底面三点或四点放置于同一水平面三个或四个load cell上进行重心测量。对于4点重心测量,通常将设备简化为刚体,不考虑形变,二维重心测量模型如图1,其中load cell1~load cell4读数分别为m1~m4设备总重记为G。
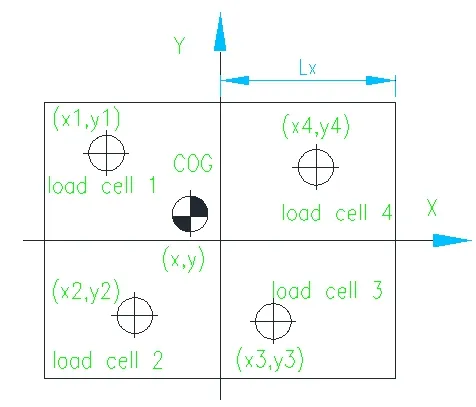
图1 二维重心模型
二维重心公式推导如下:
依据力对轴矩平衡得出公式(1)和(2)。

其中g为重力加速度。
对于规则几何体,如长方体。三维重心测量十分方便。通常可采先测x、y向重心,然后用二维重心测量方法测量z向重心,然后结合x、y向重心得出三维重心(x,y,z)。
海洋工程项目设备都是以管线、型钢等焊接而成的不规则体,三维重心无法采用常规测量方法进行测量。参考规则几何体三维重心测量,先测量二维重心,然后将底面沿某一轴旋转90°进行z向重心测量。对于不规则设备(如PLET),这里提出能否用类似办法进行,如转动θ角。下面将以转动θ角进行相关公式推导。
考虑PLET结构将三维重心测量简化为二维模型,如图2和图3,图3是图2中圈出部分放大图。
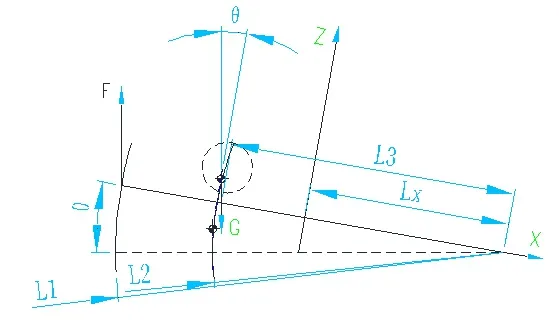
图2 三维重心简化模型
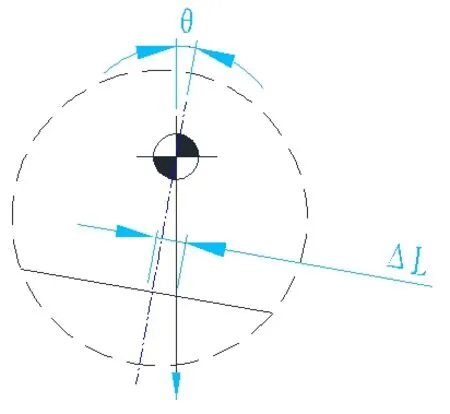
图3 局部放大图
平衡状态下,力对轴距之和为零。
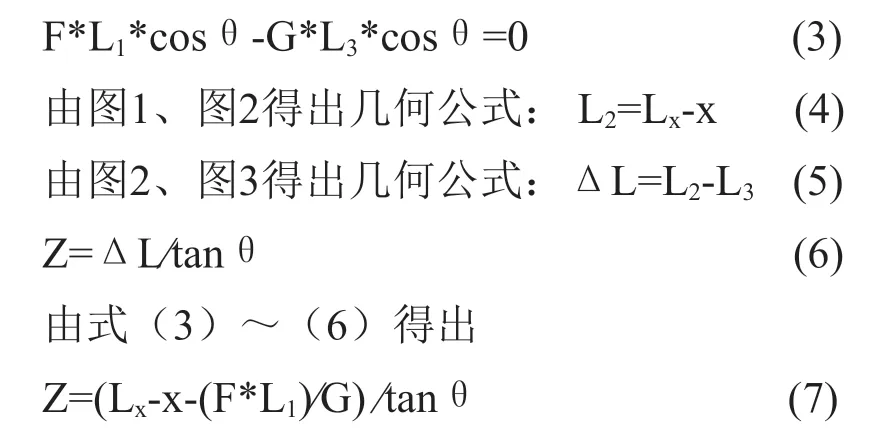
可得,理论上三维重心测量先测量二维重心,然后将底面沿某一轴旋转θ角进行z向重心测量是可行的。
θ角的确定:
考虑到稳度与重心高度成反比,θ角越大,重心越高,因此θ越小越好。从设计经验得出,z向重心一般很低,实测θ角可以取20°以内,且尽量取较小值。
3 工程实际应用
南海某项目共计25台PLET,9台PLR,28台跨接管,1台STM。25台PLET中有2台12寸钢悬链立管PLET和1台18寸钢悬链立管PLET。该种PLET吊装图中防沉板有水平状态和45°倾斜角状态,由SS7安装,安装过程,首先完成PLET与海管焊接,然后下放至海床。根据测试规格书要求,该种PLET需要进行重心测量,SS7进一步要求对PLET进行三维实际重心测量。
以18寸刚悬链立管PLET进行应用。该PLET理论重心为(-313,0,392.4),单位mm,如图4所示,X轴水平向右,Y轴竖直向上,Z轴垂直纸面向外。水平吊装X方向最小吊点距离5600mm,Y方向最小吊点距离4750mm。垂直吊装X方向最小距离3959.2mm,Y方向最小吊点距离4750mm ,Z向最小吊点距离3959.2mm。规格书对重心要求为任意两吊点方向测量值偏差不超过该两吊点距离的2.5%。
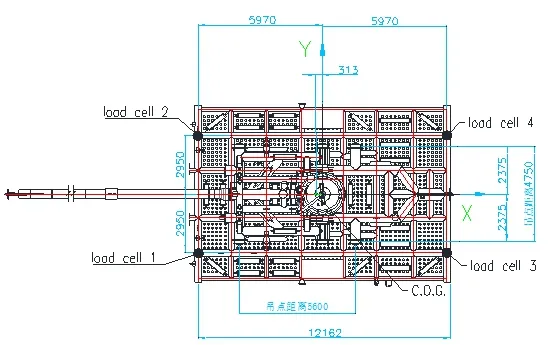
图4 PLET
基于二维重心测量先测出二维重心,南海项目二维重心测量如图4。设loadcell1~loadcell4读数分别为m_1~m4,四点二维坐标分别为(x1,y1)~(x4,y4)。根据公式(1)和公式(2)得出:


依据公式(8)和公式(9)计算出3次称重重心,最后对3次结果求平均值。
二维测量结果见表1,m单位吨,x、y单位mm。得出重心为(-327.9,18.6)。

表1 二维数据表
依据二维测量结果,对管线终端进行倾斜吊装(管线终端与地面成一定角度θ,如图5),利用力矩平衡计算出倾斜重心Z向值,如表2。拉力计读数记为Fi(i=1,2,3)。

表2 重心Z向
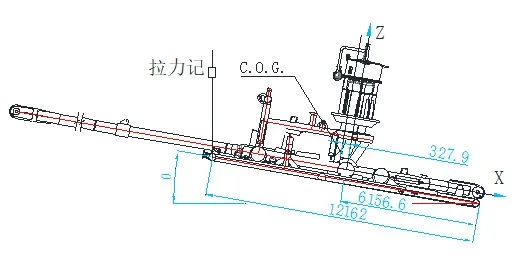
图5 Z向重心
在实际操作过程,受限于吊机等作业情况以及其他工具等限制,倾斜角度在7°以下做不到,在7°到10°之间很难完成,在10°到20°非常容易完成。考虑设计经验和现场操作,选取θ为10°,进行三维重心测量。
整体测量重心为(-327.9,18.6,365.3)较理论重心(-313,0,392.4)偏差为(-14.9,18.6,-27.1)。
按照规格书要求,重心偏差应控制在X方向不超过3959.2*2.5%=99mm,Y方向不超过4750*2.5%=118.8mm,Z方向不超过3959.2*2.5%=99mm。由上得出测量结果偏差都在范围内,满足要求。该钢悬链立管PLET在安装时按照实测数据进行安装方案设计,成功安装,证明所述方案可行。后续两台12寸钢悬链立管按照该种计算方法也成功安装,进一步证明方案可行性。
4 结论
本文依据当物体处于平衡状态时,力对轴矩之和为零。在规则几何体重心测量的基础上,提出一种适合PLET三维重心测量的倾斜方法,并完成相关公式推导。在推导过程中对倾斜角度做了最大值规定。在南海某项目中采用该方法测量三维重心,并进一步结合实际情况明确倾斜角10°。该项目3台钢悬链立管PLET应用证明了本方法的适用性,同时可进一步推广于其它有三维重心测量海洋工程设备。
猜你喜欢
中国应急管理科学(2022年2期)2022-05-23
中国建筑金属结构(2021年12期)2022-01-10
建材发展导向(2021年7期)2021-07-16
石油化工建设(2020年1期)2020-08-24
石油化工建设(2020年1期)2020-08-24
建材发展导向(2019年11期)2019-08-24
价值工程(2017年6期)2017-03-15
舰船科学技术(2016年1期)2016-02-27
Beijing Review(2015年43期)2015-11-25
科技创新与品牌(2014年1期)2014-08-15