大型客机前起落架气动噪声源三维阵列识别技术研究
2022-07-11 09:41赵儒哲宋章辰阮佳明刘沛清
民用飞机设计与研究 2022年1期
赵儒哲 郭 昊 宋章辰 阮佳明 刘沛清
(北京航空航天大学陆士嘉实验室(航空气动声学工业和信息化部重点实验室)北京 100191)
0 引言
飞机降落过程中,起落架是机体气动噪声的重要噪声源,特别是对于大型宽体客机,起落架噪声远远大于其余部分噪声。据统计,在着陆过程中,起落架系统产生的所有噪音约占总噪音的30%。因此,在过去的二十年中,起落架噪声已经被广泛研究。由于高涵道比发动机的短舱直径不断增加,为了保持翼吊发动机短舱到地面的净距离,就需要增加起落架的长度。起落架噪声是由于气流流过起落架时,气流压力受到扰动产生的,其本质是空气动力噪声。起落架支柱部分的圆柱在气流中会产生涡轴垂直的展向涡脱落,而将它立于起落架舱中时,起落架舱的空腔结构又会产生涡轴水平的展向涡脱落,两种垂直的涡脱落在下游发生非线性耦合,将会产生比二者更剧烈的噪声源。
麦克风阵列测量技术是进行民机机体气动噪声研究的主要手段。在国内,由于气动噪声研究领域起步较晚,大中小型的气动风洞满足要求的不多,对于麦克风阵列技术的研究是具有现实意义的,可以为飞行器的降噪研究提供新的测量手段。
因此本文首先从最基本的二维平面麦克风阵列入手,选择波束成形声源定位算法,对单个点声源进行三维声场的声源定位。其次通过引入3D Beamforming和3D CLEAN-SC算法,并搭建三维麦克风阵列,实现对起落架的侧边噪声和过顶噪声的同步采集,求解噪声源在三维空间中的真实位置与强度,从而提高声源定位的精度。最后在对起落架气动噪声机理深入了解的基础上,设计可行的降噪措施加以研究。
1 阵列识别技术
1.1 二维平面麦克风阵列
以Matlab为仿真软件,编写相应的程序,目的模拟的是没壁面反射和封闭风洞背景噪声的实验。计算中选取64通道的多臂螺旋阵列为模拟阵列,其麦克风分布如图1(a)所示,在频率为4 kHz时,阵列响应图谱如图1(b)所示。假设空间存在点声源模型,根据点声源声场分布公式(1)计算麦克风阵列中每个麦克风处的声压信号。其中为常数,是声音传播距离,是声源的频率,表示声速。麦克风阵列模拟“采集”这些声音信号。麦克风阵列数据处理时将这些模拟“采集”的信号作为数据处理程序的输入信号。
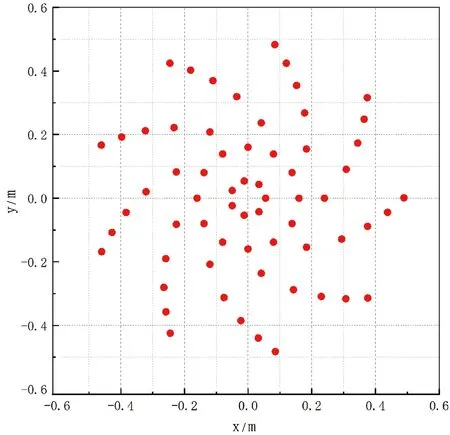
(a) 64通道麦克风阵列
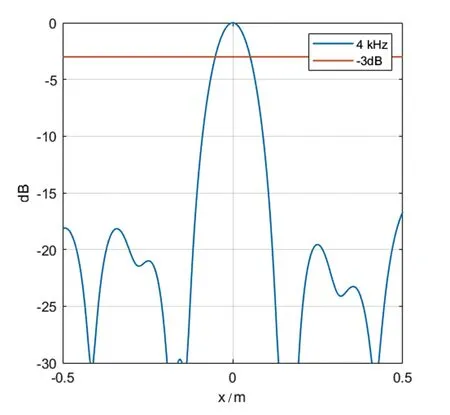
(b) 理论响应图谱图1 64通道多臂螺旋阵列图谱

(1)
二维麦克风阵列平面与z轴垂直,阵列几何中心空间位置为(,,)。假设在阵列平面近存在一单极子声源,其时域上是周期性正弦信号构成的时间序列信号,频域上是固定频率的离散峰值噪声,位置为(,,),选取阵列中心位置作为参考点,计算可得点声源到各阵元的距离和点声源到阵列参考点的距离,在进行波束成形计算时会选择可能包含声源的一个与平面进行扫描,扫描平面平行于阵列平面,则对于扫描面上的任一扫描点,阵列的指向向量为:

(2)
进而可得第个麦克风的指向向量:
(3)
其中,为第个麦克风的剪切层振幅修正因子,表示声波到达参考点与声波到达第个麦克风的延迟时间,则
(4)
对于由个麦克风组成的麦克风阵列,可形成一个×的互谱矩阵,
(5)
利用互谱矩阵和阵列的指向向量,对进行相关处理后的麦克风阵列信号进行延迟求和计算,得到阵列对每一个扫描点的输出功率谱如下:
(6)

(7)
对得到的功率谱矩阵进行归一化处理,最终得到声源识别结果,对齐时间,功率最大值对应的点就是声源的位置。通过传统波束成形技术(Conventional Beamforming)处理实验数据可获得较高质量的结果。但在使用波束成形Delay-and-Sum算法处理一些相干声源的问题时,得到的噪声云图中会包含有较高的旁瓣,不仅可能会被错误地认定为声源,而且还有可能掩盖其他真实存在的声源。为抑制声源旁瓣,提高阵列测量的空间分辨率,科研人员将反卷积算法应用到阵列波束成形技术中。CLEAN-SC算法是Sijtsma基于射电天文学的CLEAN-PSF算法开发的一种频域反卷积技术。该算法是在经典算法的基础上,从经典算法得到的声成像图中减去那些本不该含有的旁瓣,从而可以得到的由一系列主瓣构成的更为清晰的声成像图。
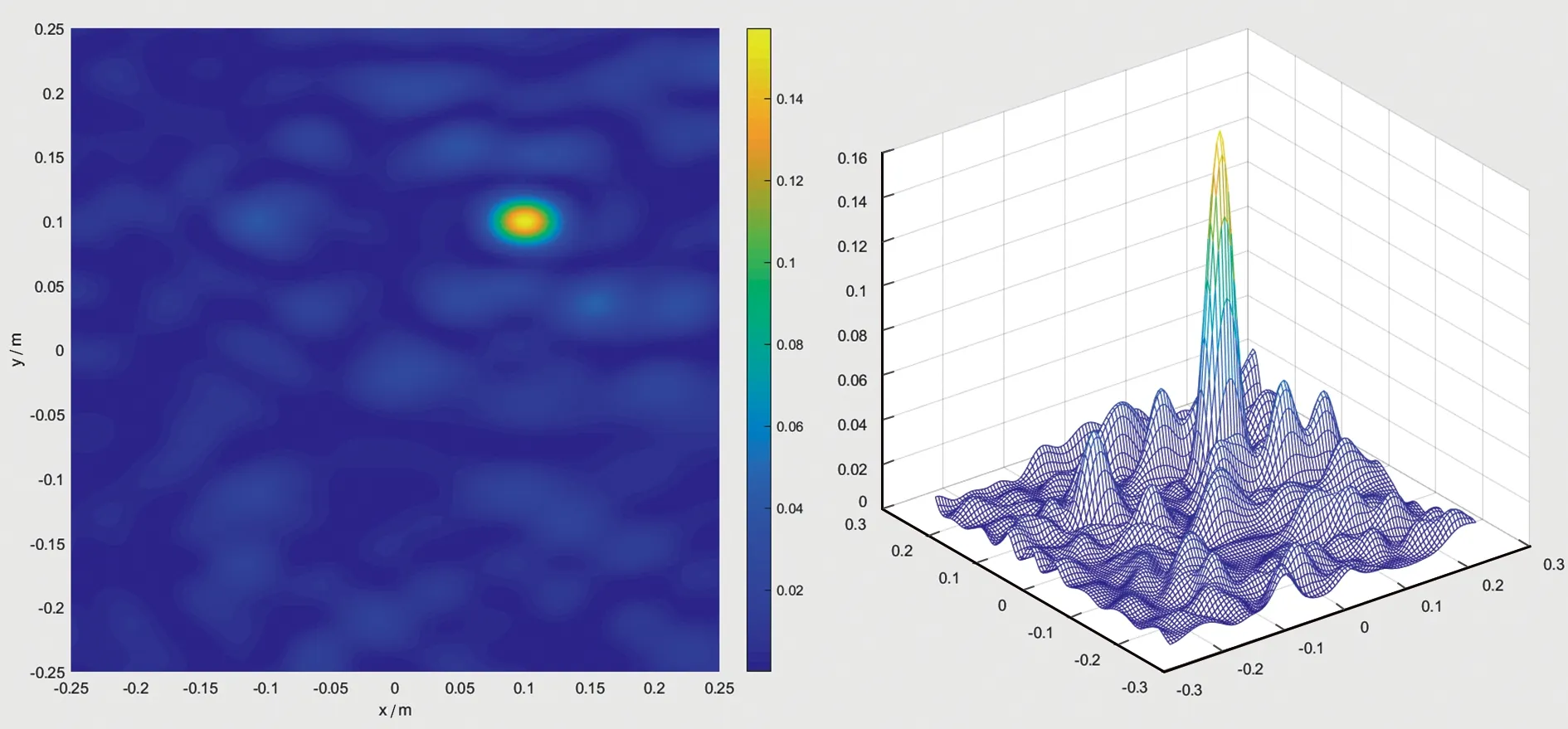
图2 声源为点声源时的声源分布图(Beamforming结果)
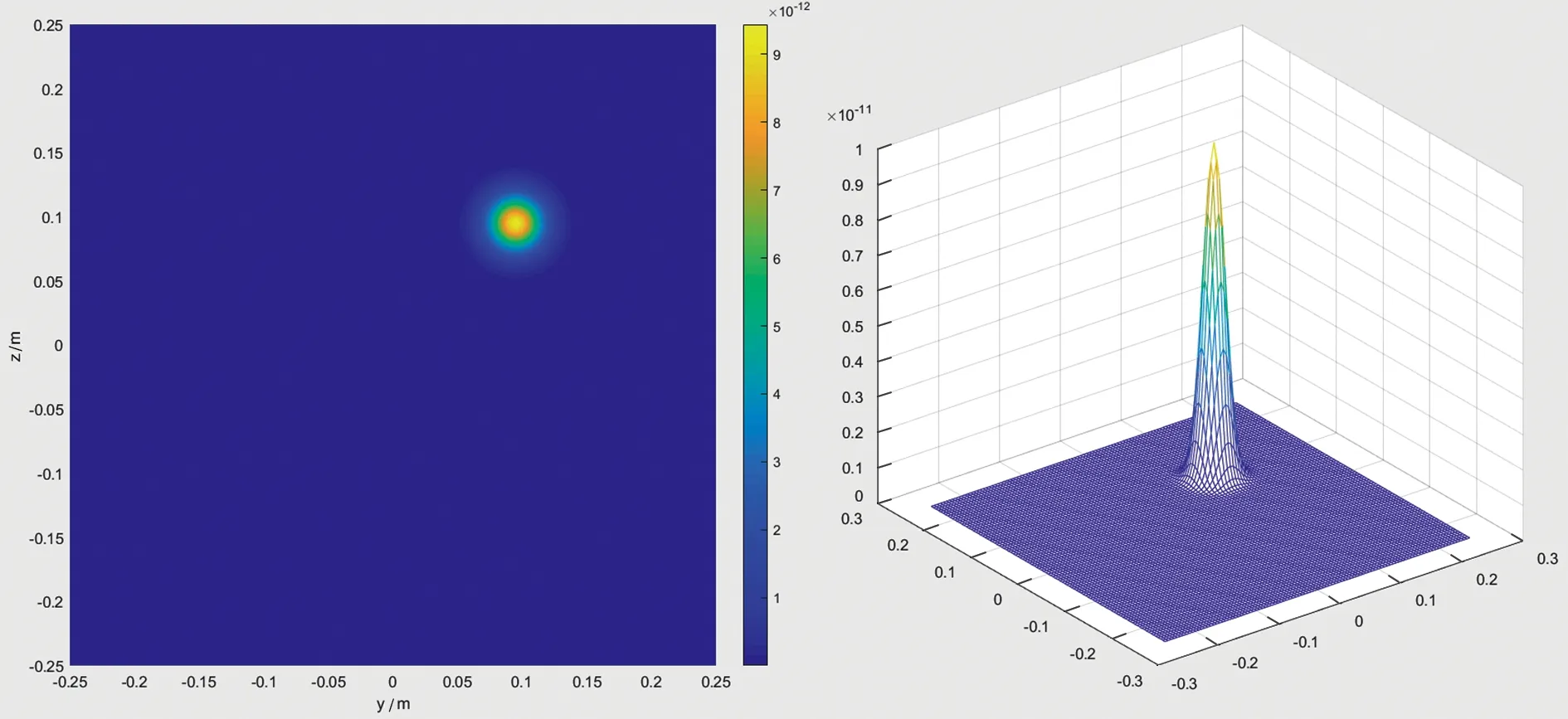
图3 声源为点声源时的声源分布图(CLEAN-SC结果)
1.2 三维麦克风阵列对多个点声源的识别结果
当波束形成的扫描平面与麦克风阵列平面平行时,所得的声源云图具有良好的分辨率。而扫描平面垂直于麦克风阵列时,平面波束形成的空间分辨率急剧下降。对于声源空间分布较为复杂的对象(如起落架),3D Beamforming可以在声源定位和确定声源强度等方面提供更高的精度。三维波束形成假设声源分布在三维空间中,并且通过测量距离的迭代扫描获得整个三维声源空间的分布。相比于二维波束成形,它可以在平面阵列的切向和法向获得较高空间分辨率,提供更全面的声源信息。
本文中将非同步测量的成像结果与同步测量的成像结果进行了比较和详细分析。通过按照特定顺序移动阵列,并记录特定位置的信号,非同步测量可以将常规的麦克风阵列虚拟化为规格更大或更高排布密度的阵列。在非同步测量中,需要足够数量的固定参考点来确定麦克风之间的相位关系。Antoni等人提出了一种不需要参考点的非同步测量方法,其中贝叶斯概率方法和最大化期望算法用于迭代重建声源场。非同步测量和同步测量的结果具有相似的精度。对于这种非同步测量方法,上海交通大学余亮等人提出了快速迭代算法以提高迭代速度,包括增广拉格朗日乘子(ALM)算法和交替方向乘子法(ADMM)算法。这些快速迭代算法可以有效地恢复由于非同步测量导致的交叉谱矩阵中的缺失数据。
本文所使用的非同步测量方案是基于三维算法的二维阵列声源识别后的结果,同一构型的二维阵列在x和z两个方向上对同一三维声场空间进行扫描,经过三维波束成形算法处理后得到两个三维声压矩阵,如果分别转化成功率谱密度(PSD)直接输出,势必会得出仅在某个方向有较好分辨率的结果,因此本研究中对所得出的两个三维声压矩阵进行了叠加平均处理后,再转化成PSD输出结果。而同步测量则要求麦克风数量足够组成三维阵列,通过增加各个麦克风的指向向量的z维度,并在三维空间中选定声场扫描区域外的某一点作为三维阵列的参考点,使用三维波束成形算法进行声源识别。
图4显示了同步测量数值模拟中麦克风阵列的几何形状和声源的位置,四个点声源设置在一个假想的立方体四个顶点上,该立方体边长为0.25 m,以立方体的几何中心为坐标原点,建立了空间笛卡尔坐标系。在垂直于x轴和z轴方向上分别设置64通道的多臂螺旋阵列为模拟阵列,其几何形状与之前的模拟相同,两个位置的阵列与原点的垂直距离均为0.725 m,图5显示了非同步测量的原理,与同步测量相比,该种测量方式所需的麦克风数量较少。麦克风阵列的第一个位置位于=0.725 m平面。在第二次测量中,麦克风阵列逆时针旋转90°。麦克风阵列的第二个位置位于=0.725 m处。
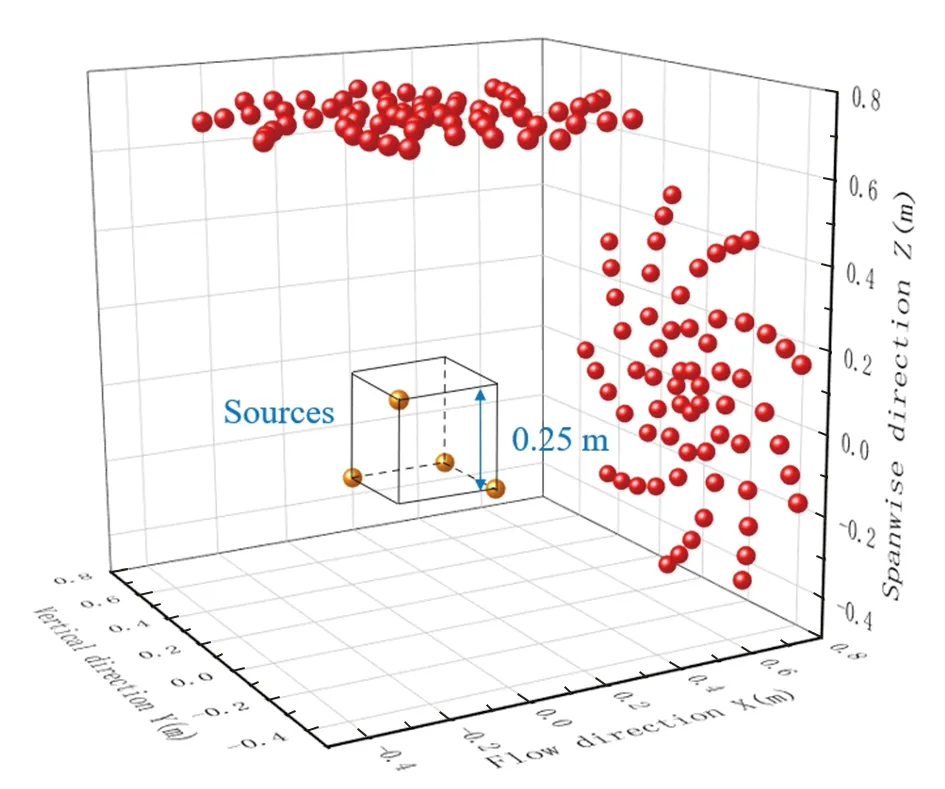
图4 数值仿真中同步测量工况的设置
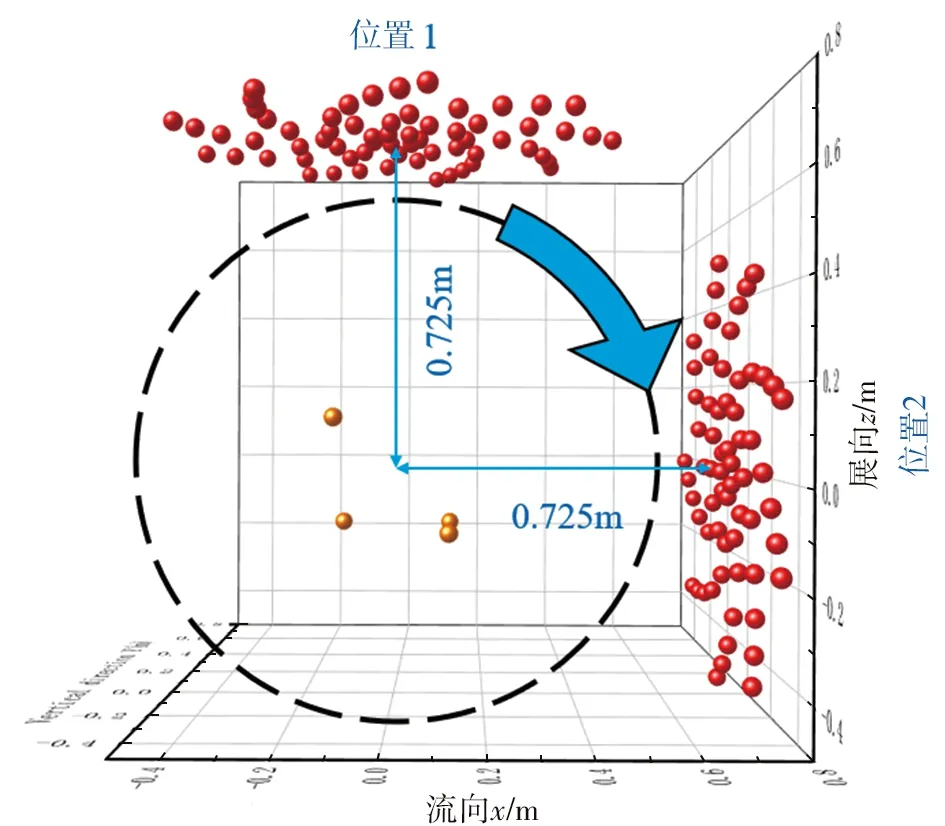
图5 数值仿真中非同步测量工况的设置
对于非同步测量,麦克风阵列正交移动一次。相应的同步测量是两个麦克风阵列同时采集数据。由于波束形成算法适用于识别较高频率的声波,因此选择了4 000 Hz的频率。非同步测量的波束形成图切片如图6(a)~6(c)所示,同步测量的波束形成图切片如图6(d)~6(f)所示。波束形成的结果显示同步测量和非同步测量都能准确定位声源位置,并具有良好的空间分辨率;但非同步测量与同步测量相比,尽管减少了一半麦克风数量的使用,旁瓣却明显大于同步测量。
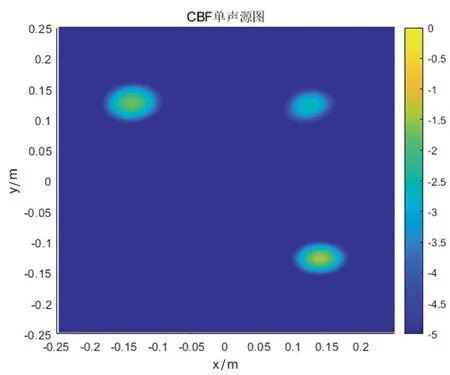
(a) 非同步z= 0.125 m
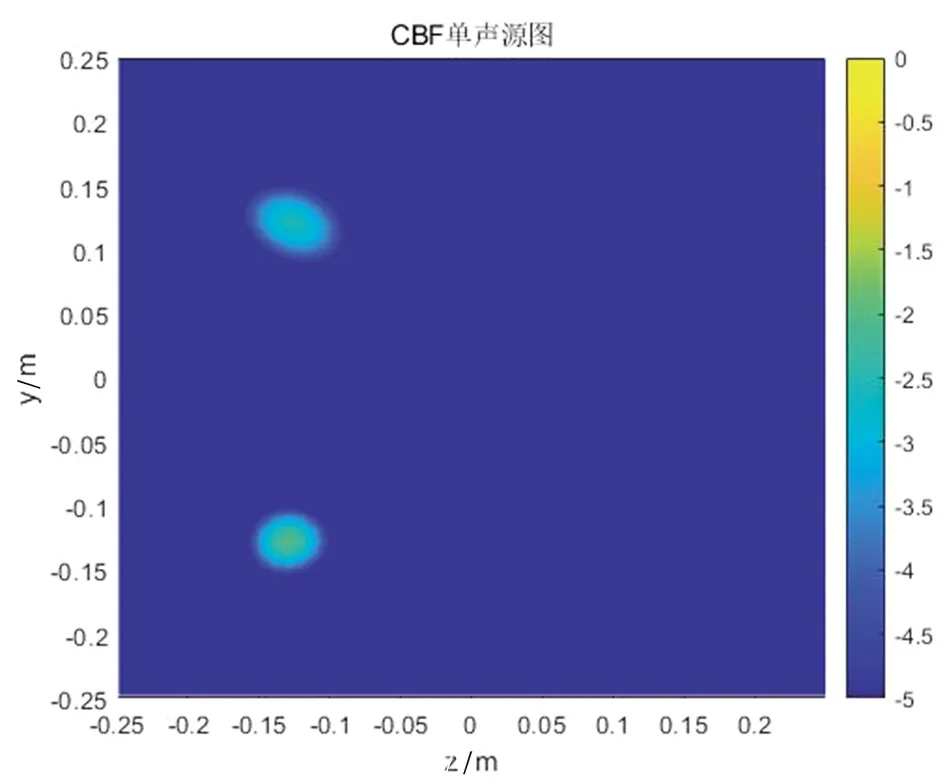
(b) 非同步x= 0.125 m
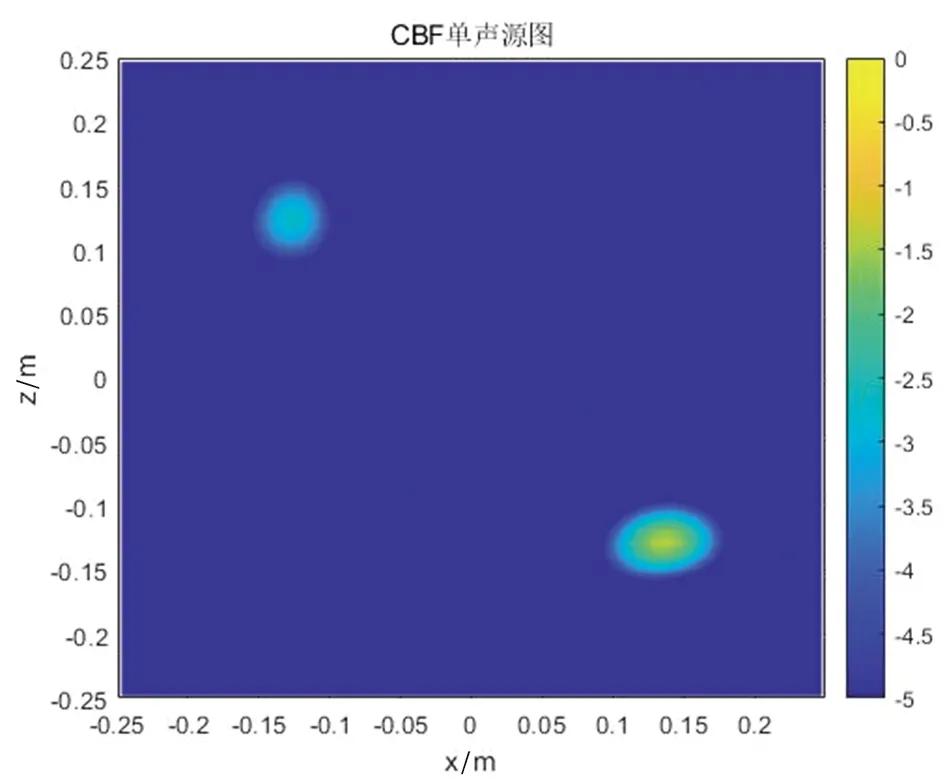
(c) 非同步y= 0.125 m
(d) 同步z= 0.125 m
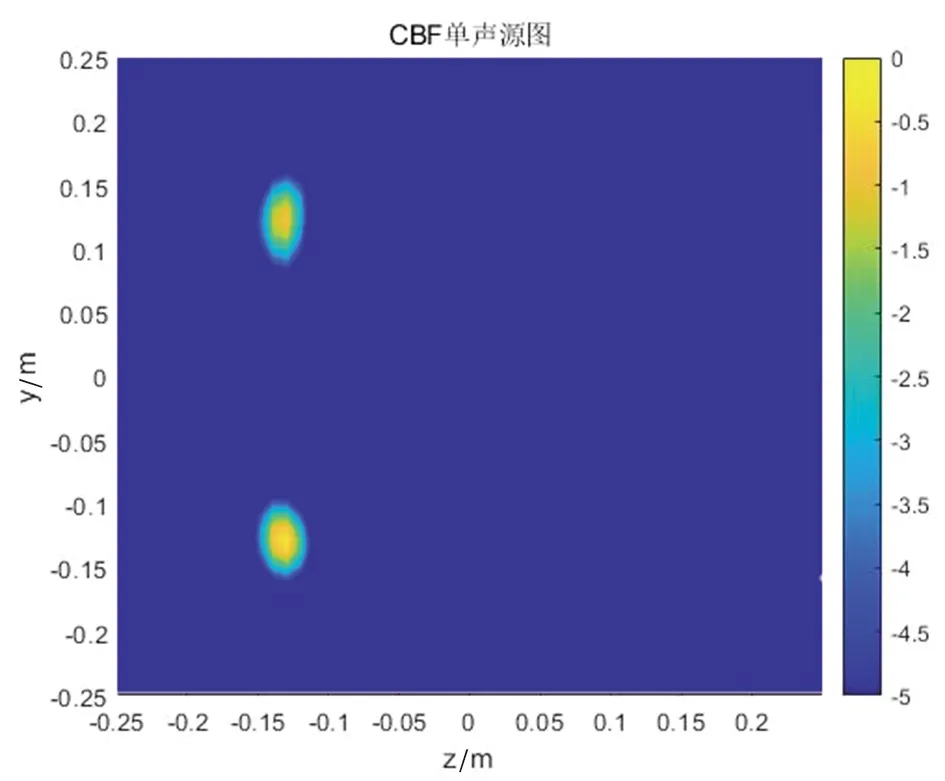
(e) 同步x= 0.125 m
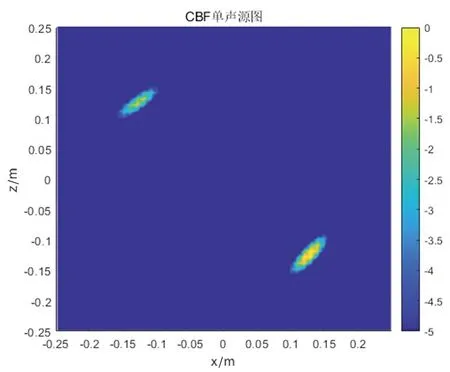
(f) 同步y= 0.125 m
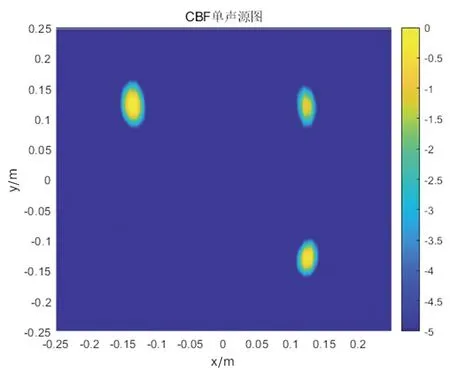
本文还使用3D CLEAN-SC算法对仿真信号进行了处理,非同步测量的3D CLEAN-SC结果切片如图7(a)~7(c)所示,同步测量的3D CLEAN-SC结果切片如图7(d)~7(f)所示。与3D Beamforming的结果对比不难看出,两种算法均提供了正确的声源位置结果,但3D Beamforming的主瓣较大,3D CLEAN-SC算法能够明显去除旁瓣并减小主瓣的大小。

(a) 非同步z= 0.125 m
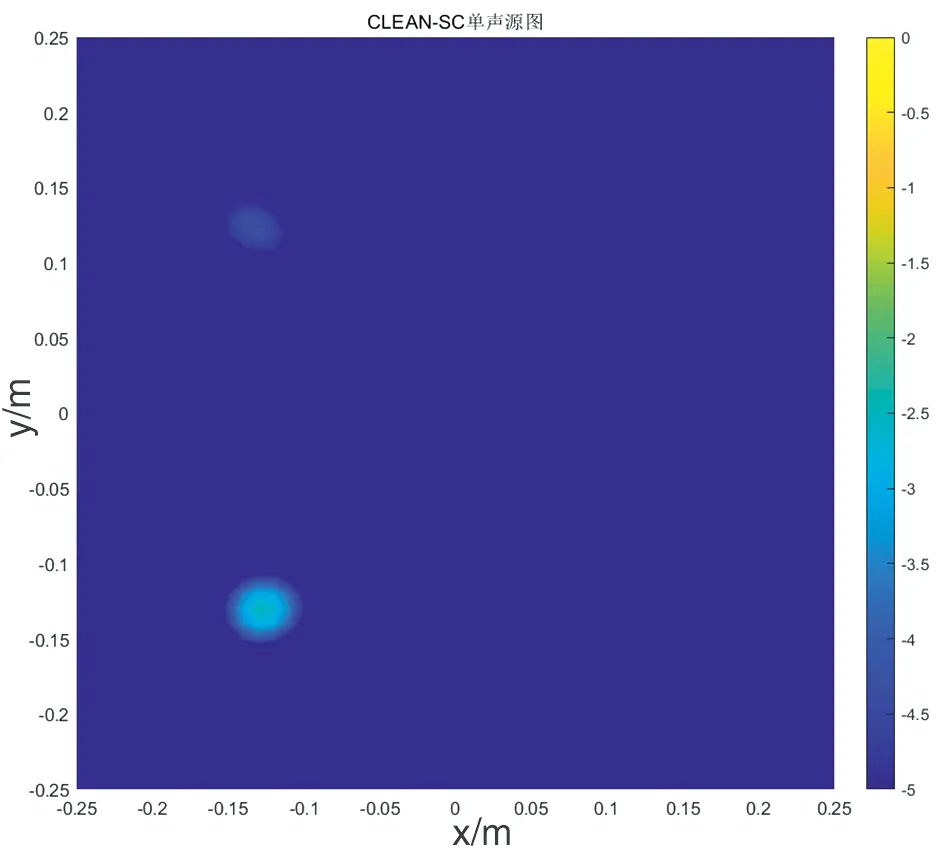
(b) 非同步x= 0.125 m
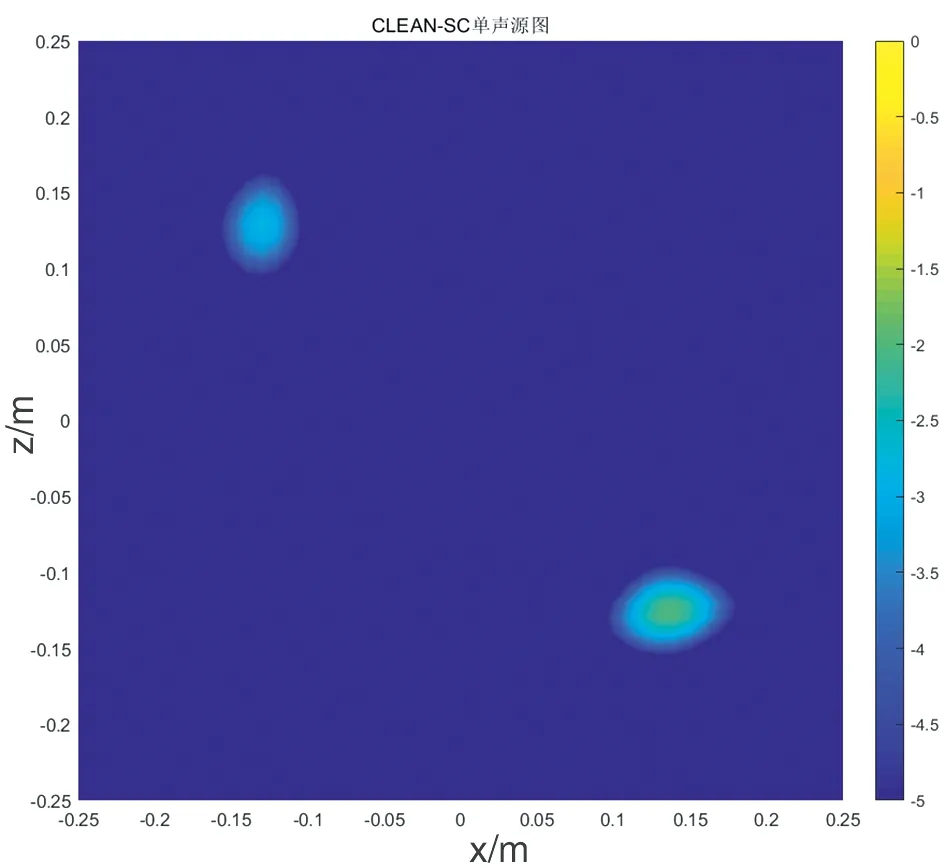
(c) 非同步y= 0.125 m
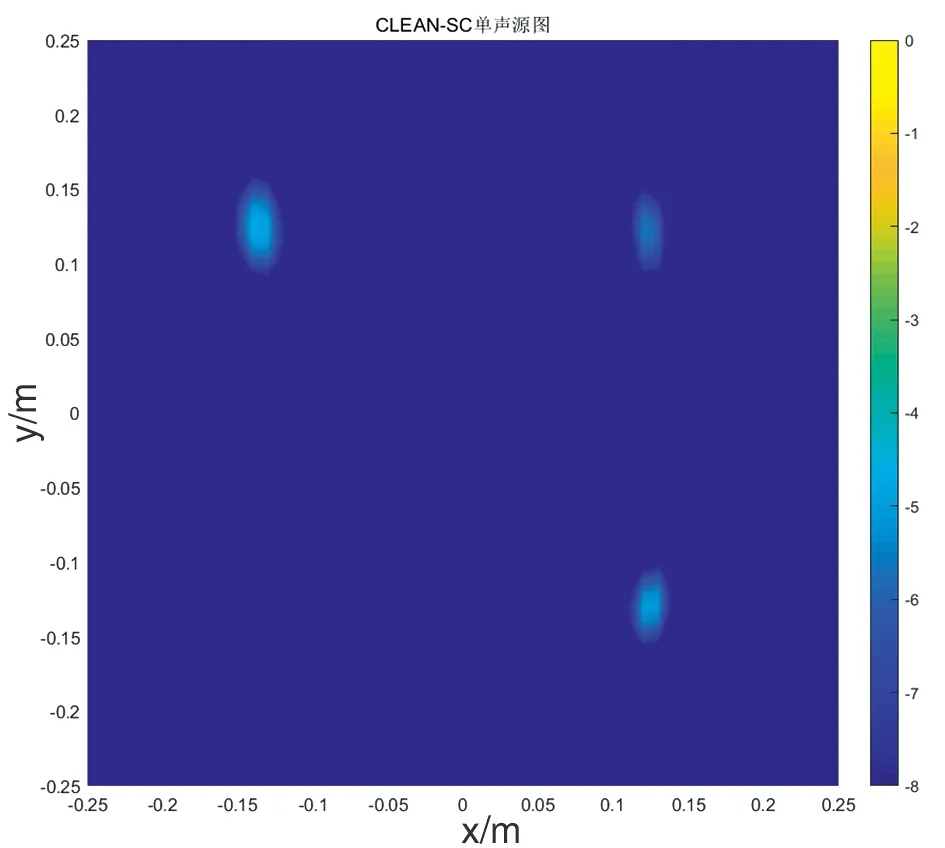
(d) 同步z= 0.125 m
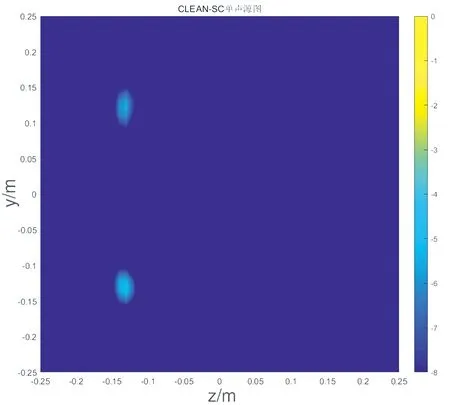
(e) 同步x= 0.125 m

(f) 同步y= 0.125 m
2 起落架声源识别结果及分析
2.1 实验设备及实验模型介绍
简化前起落架气动声学试验在北京航空航天大学D5气动声学风洞中进行。D5风洞是一座低湍流度、低噪声回流式风洞,可以完成航空部件气动试验和气动声学试验。试验段高宽均为1 m,长2 m,最大风速可达80 m/s,中心区域的湍流度不高于0.08%。试验段外建有高7 m,宽6 m,长6 m的全消声室,以确保无反射的声学测量条件,消声室的低频截止频率为200 Hz。
对于远场噪声测量,采用丹麦GRAS Sound & Vibration公司的1/2英寸的自由场阵列麦克风G.R.A.S. 40PH组成三维阵列进行测量,如图8所示。数据采集系统使用来自于NI公司的装有PXIe-4497采集卡的多通道的PXIe-1082采集机箱,通过LabVIEW开发的软件进行噪声数据采集。

图8 噪声测量传感器——G.R.A.S. 40PH麦克风
本文实验所采用的简化起落架模型是1/2缩比的LAGOON(LAnding Gear nOise database and CAA validatiON)项目的前起落架模型。该项目的实验模型为1∶2.5缩比的简化A320前起落架模型,主要包括机轮、轮轴和主支柱三个部件,同时在两个轮胎内侧各开有一个浅腔。图9为本次实验所使用的LAGOON标模缩比模型的具体尺寸及坐标系设定情况。起落架模型的安装情况如图10所示,轮轴的中轴线的中心位置与风洞的轴心线重合,主支柱位于实验段的中间位置。将机轮中轴线在起落架对称面上的投影点定位三维坐标系的原点,建立右手坐标系,轴正向为流向,轴和轴的正向指向如图11所示。
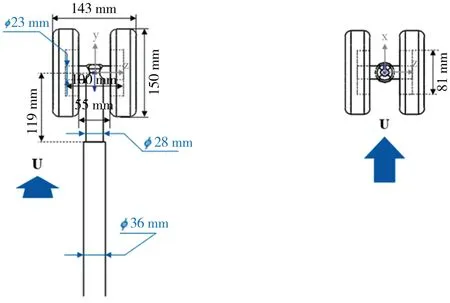
图9 LAGOON缩比模型的尺寸示意图
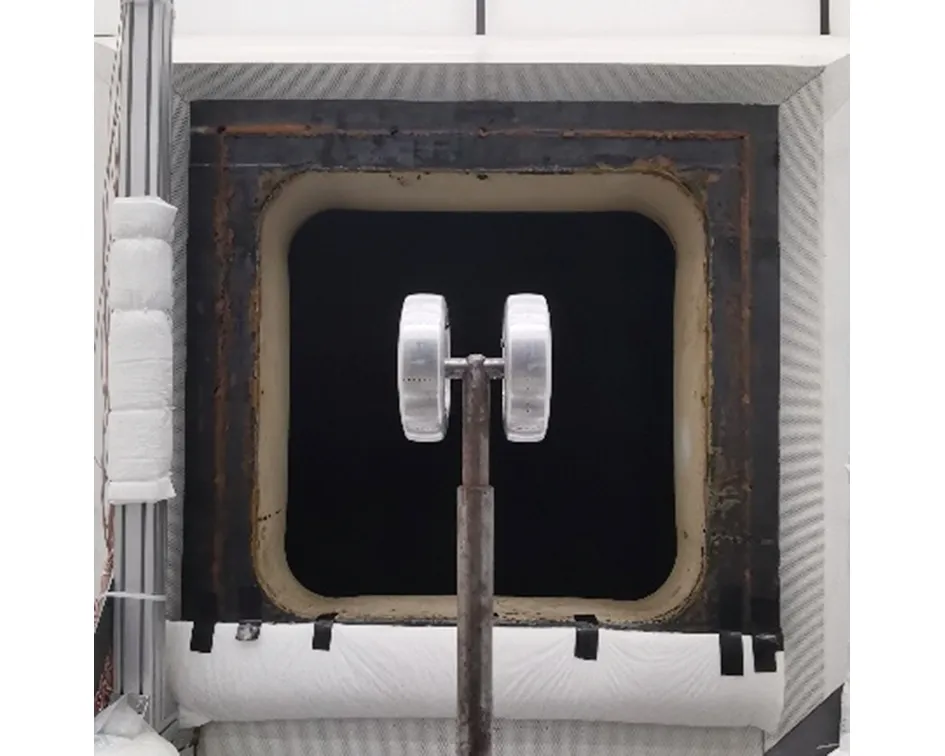
图10 起落架在D5风洞开口实验段中的安装情况

图11 三维阵列与起落架的相对位置及空间坐标系的设定
实验所使用的三维阵列由两块阵列面板组成,顶部阵列的几何布局为32通道的8螺旋臂螺旋形,阵列平面距离原点1.5 m。侧面阵列的几何布局为32通道的5螺旋臂螺旋形,阵列平面距离原点2 m,其中传声器的具体坐标位置如图12(a)和(b)所示。
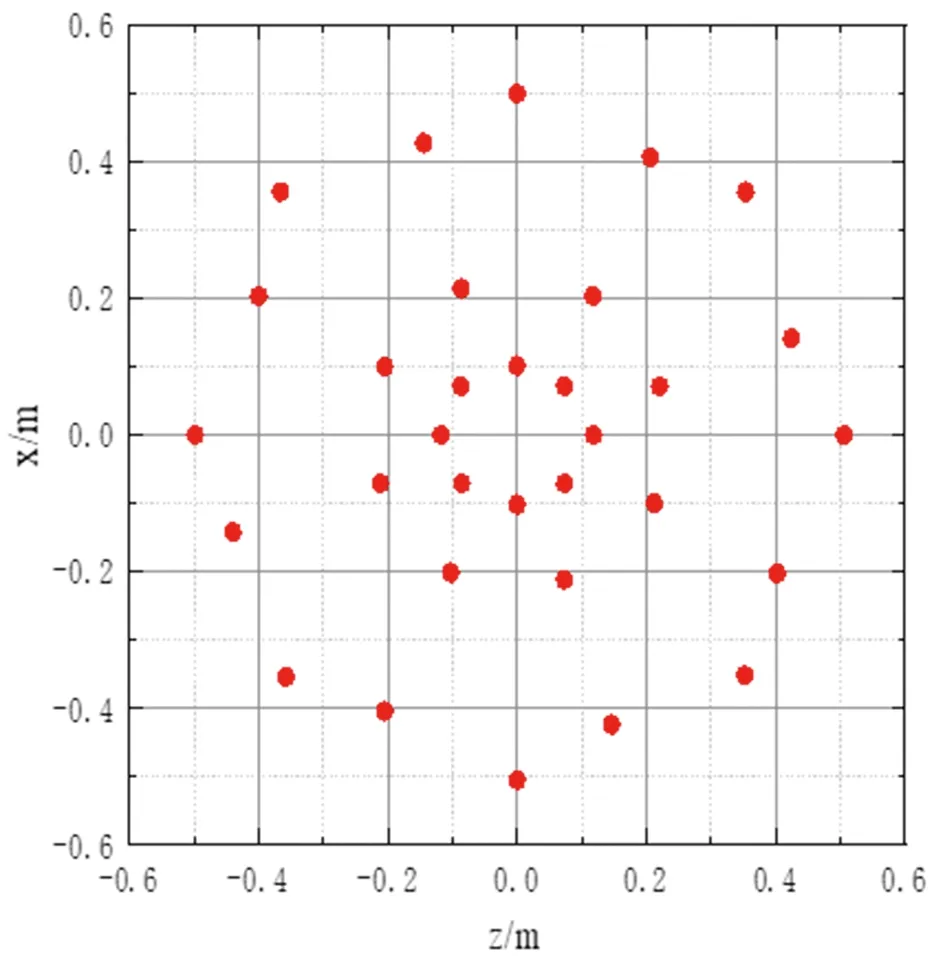
(a) 过顶阵列
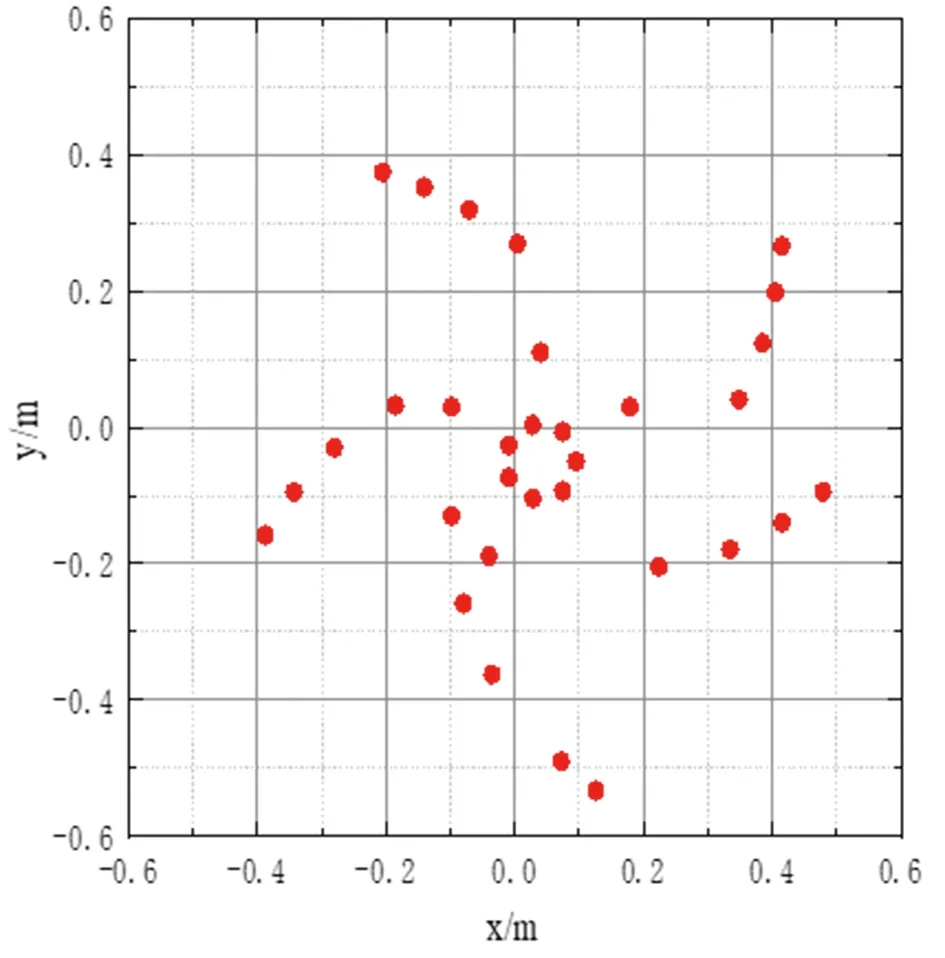
(b) 侧边阵列图12 麦克风位置分布
2.2 三维阵列定位点声源实验
声源由蓝牙扬声器驱动,在使用三维阵列对起落架的气动噪声源进行声源定位之前,首先要保证安装位置的麦克风的空间几何坐标与输入的理论空间几何坐标完全一致,因此需要通过提前校准来保证后续实验声源定位结果的可靠性,同时对阵列实际识别声源的能力进行考核。本实验中使用直径为5 cm的扁平圆柱状蓝牙音箱作为点声源,移动至空间中的固定坐标位置,并播放频率为2 000 Hz的纯音噪声。由于出声孔设计在音箱顶部,所以并不能将其波阵面看作是球面波,但在深度方向上可以将其看成一个点声源,因此本实验在校准三维阵列的过程中采用分别处理顶部阵列和侧面阵列的方式,选用深度方向分辨率高的工况数据对二者分别进行校准。
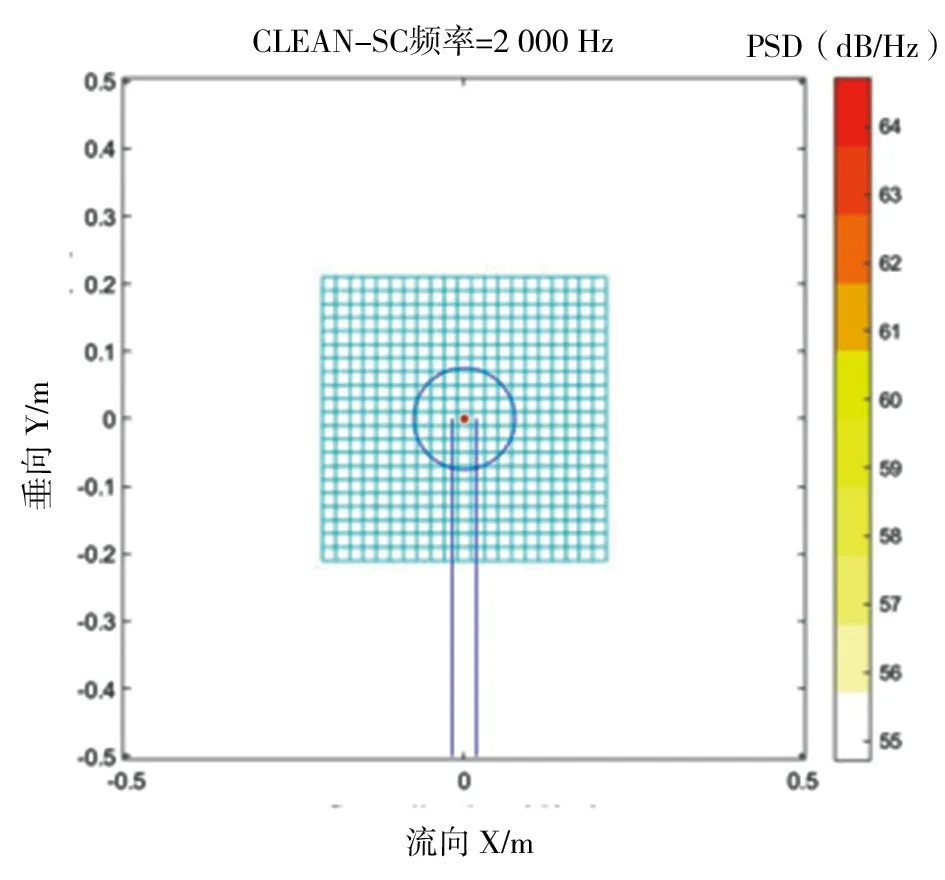
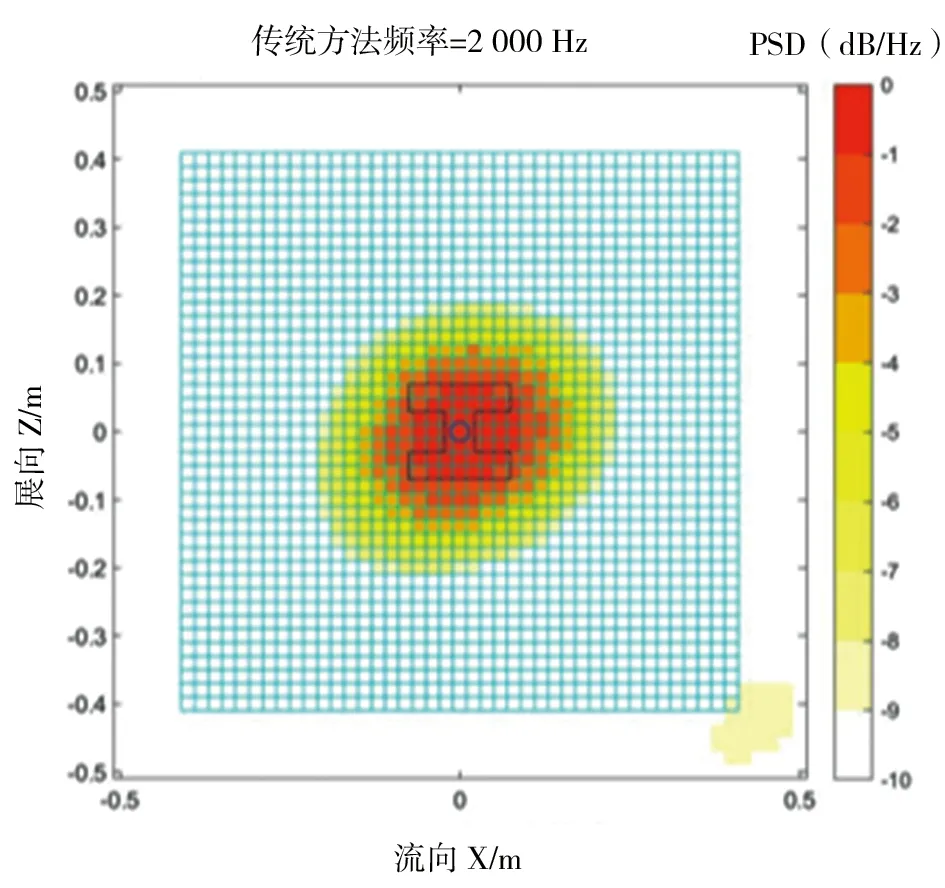
首先对侧面阵列的坐标位置进行校准,将蓝牙音箱的出声孔面朝侧边阵列放置在起落架侧面机轮的中心(此时点声源的空间坐标位置为(0, 0, 0.1)),通过传统波束成形算法和CLEAN-SC算法处理后的声源识别结果如图13(a)(b)所示,图中实线为起落架在声场中的相对位置,从CLEAN-SC算法的声源识别结果中可以确定点声源在平面的坐标位置为(-004, 005),因此将输入的侧边阵列坐标整体在和坐标轴上分别进行“+0.04”和“-0.05”的处理,完成修正后重新识别的结果如图14所示,与声场中实际点声源的坐标一致。
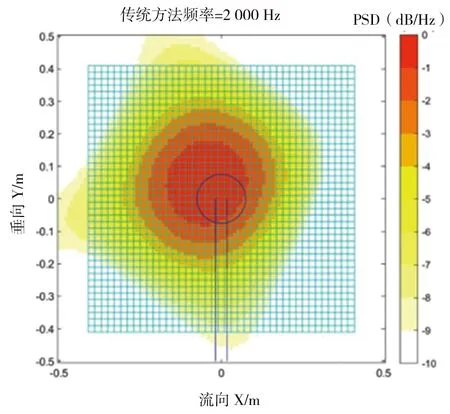
(a) 传统波束成形算法的声源识别结果
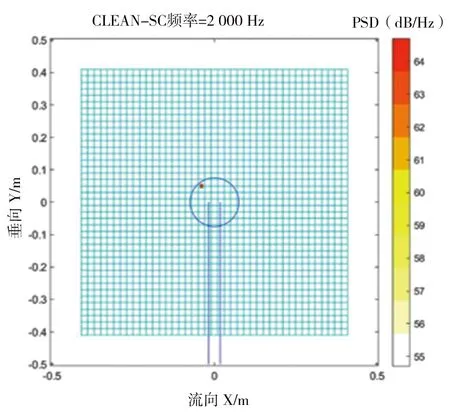
(b) CLEAN-SC算法的声源识别结果图13 声源位置为(0, 0, 0.1)侧边阵列未进行校准前的识别结果

(a) 传统波束成形算法的声源识别结果
(b) CLEAN-SC算法的声源识别结果图14 声源位置为(0, 0, 0.1)侧边阵列进行校准后的识别结果
接着对顶部阵的坐标位置进行校准,将蓝牙音箱的出声孔面朝过顶阵列放置在起落架主支柱的中心与机轮顶部相圆弧切的位置(此时点声源的空间坐标位置为(0, 0.1, 0)),通过传统波束成形算法和CLEAN-SC算法处理后的声源识别结果如图15所示,从CLEAN-SC算法的声源识别结果中可以确定点声源在平面的坐标位置为(0,0),与声场中实际点声源在平面中的坐标一致,无需调整顶部阵列的位置。至此,三维阵列中所有麦克风的坐标位置都已完成校准,可以将其投入到对于起落架气动噪声的研究中。
(a) 传统波束成形算法的声源识别结果

(b) CLEAN-SC算法的声源识别结果图15 声源位置为(0, 0.1, 0)顶部阵列未进行校准前的识别结果
2.3 三维阵列识别定位起落架噪声源
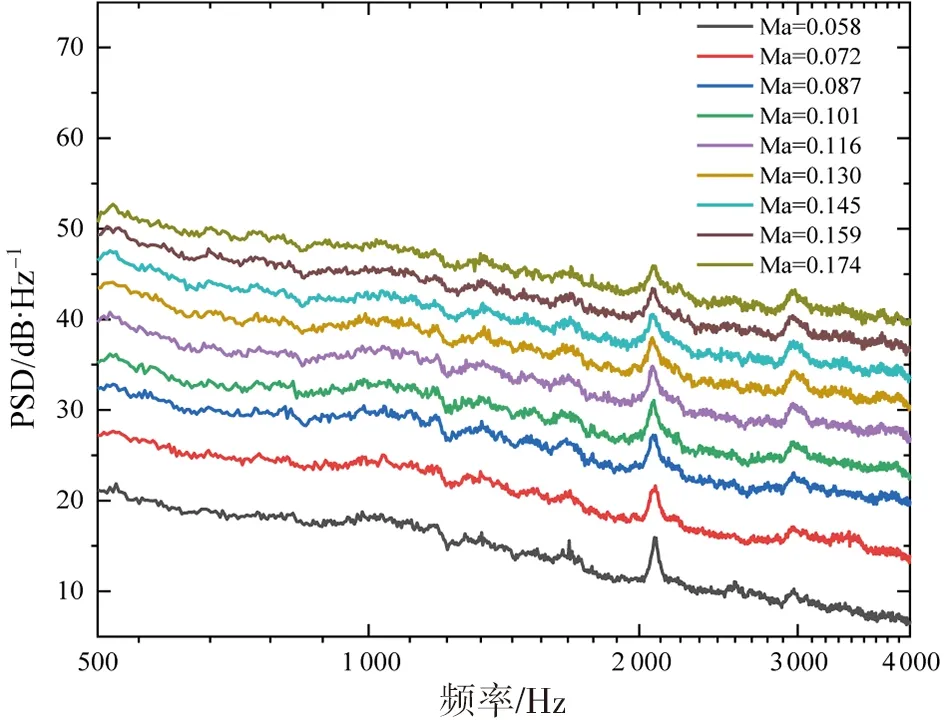
图16 起落架过顶方向的远场噪声频谱图
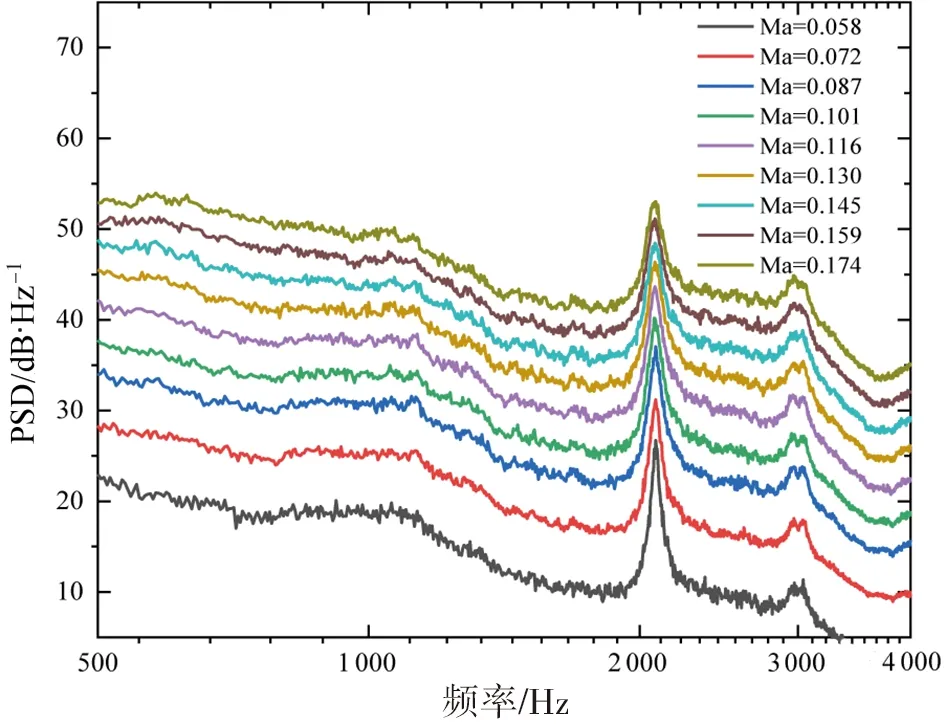
图17 起落架侧边方向的远场噪声频谱图
本文在北航D5风洞中对起落架的远场噪声特性进行研究,三维阵列所测得的远场结果如图16和图17所示,分别对应过顶阵列和侧边阵列的每个麦克风所测得的声压信号平均处理后的频谱图,可以看出在起落架的过顶方向,主要以宽频噪声为主,而且宽频频谱曲线的几何外形几乎不会随着来流速度的变化而发生改变,中高频的宽噪声主要来源于机轮内侧空腔流动中的湍流脉动,而且在侧边方向很明显可以观察到的中高频位置的两个离散峰,且频率几乎不随来流速度发生变化,该离散噪声是由机轮内侧环形空腔的声共振现象所激发,但在起落架的过顶方向很难被捕捉到,且在频谱中对应频率的声压级大幅下降。
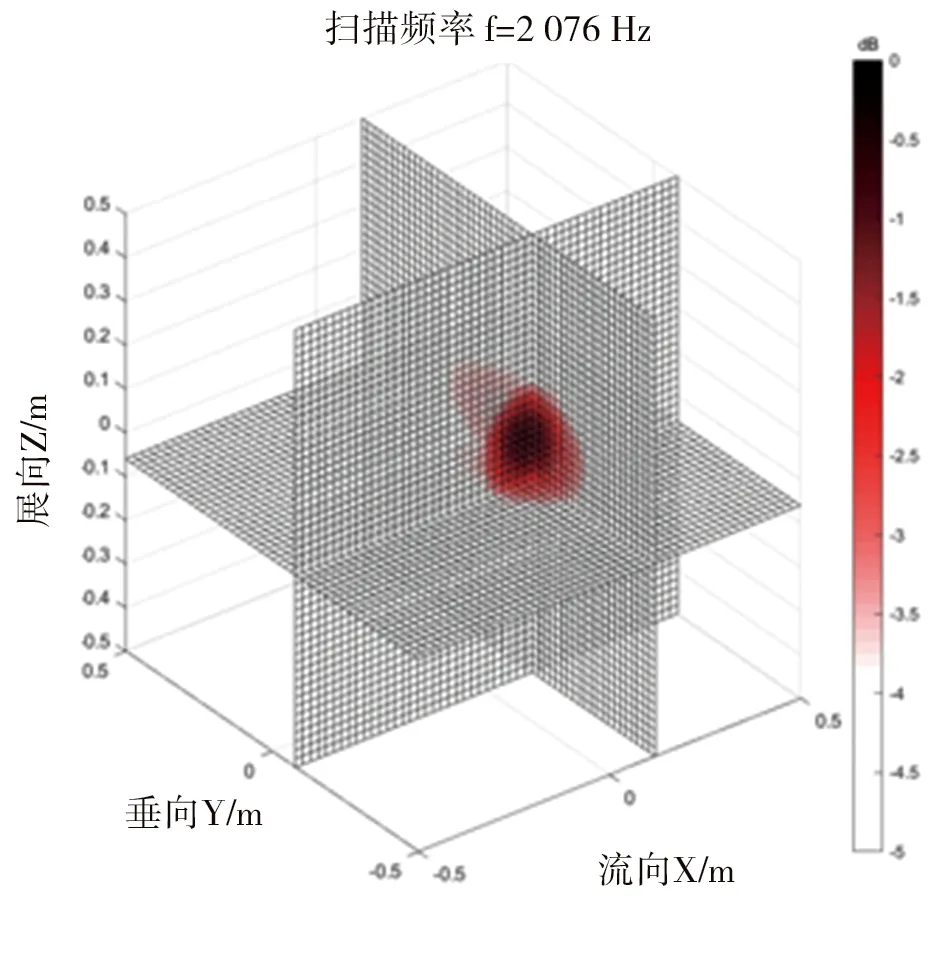
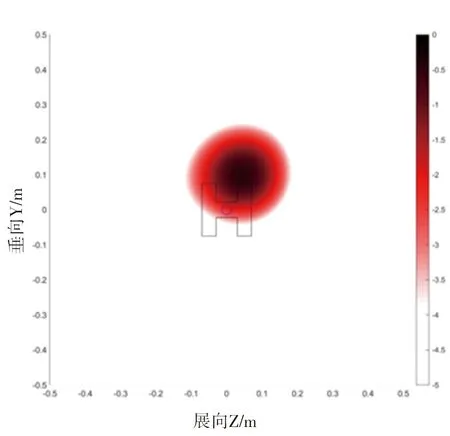
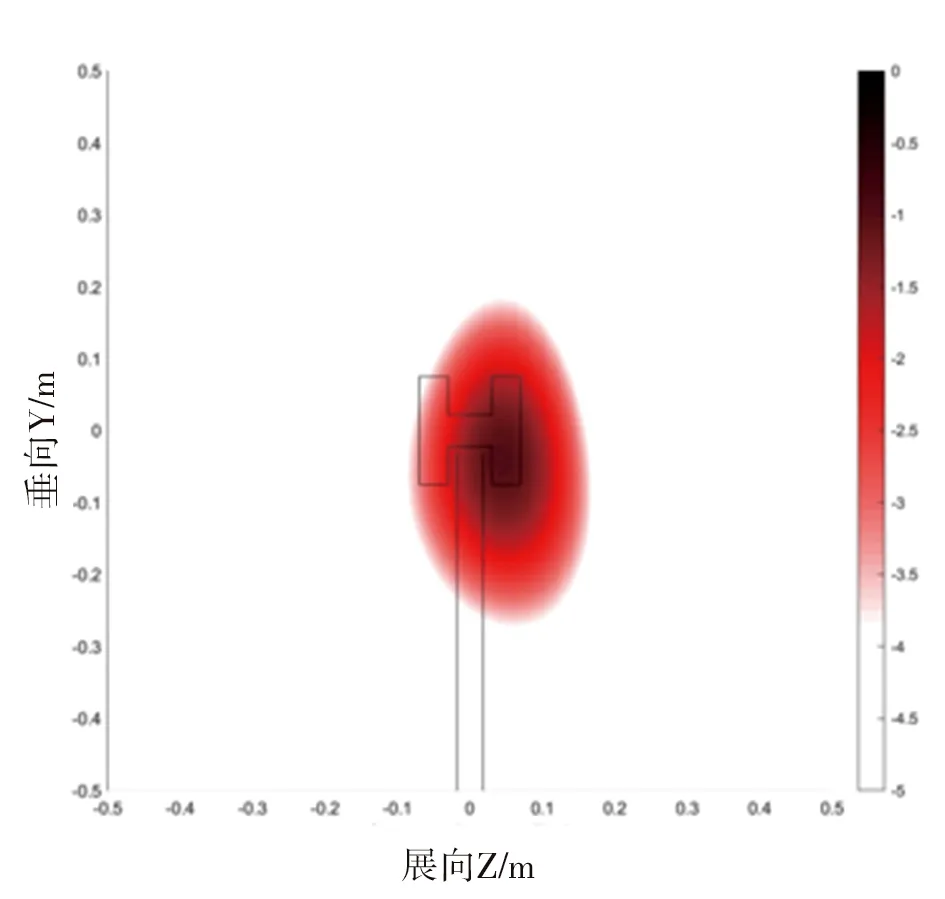
本文使用三维阵列对侧边出现的频率为2 000 Hz左右的纯音噪声进行识别定位研究。将三维阵列中全部麦克风的空间坐标位置视作整体,选取以原点为中心边长为1 m的立方体为扫描区域,参考点位置位于扫描范围之外,采用3D CLEAN-SC算法以同步测量的方式进行后处理,扫描间隔设为0.02 m,对频率为2 076 Hz的声源进行识别定位的三维切片图如图18(a)所示。将其视为点声源,则3D CLEAN-SC算法能够敏锐地捕捉到该点声源极值点所在的空间坐标的位置,即(0.12,-0.08,0.06),各个方向切面上具体的声源分布与该方向起落架的相对位置如图18(b)~18(d)所示,可以看出该声源位于起落架的尾流区域内,在起落架机轮下沿切面中,偏向轴负方向一侧机轮的位置。对比2008年Eric等人在ONERA的F2风洞中使用壁面麦克风阵列对LAGOON标模进行气动声学测量的声源定位结果,三维阵列在侧边方向的识别结果与之基本一致。
非同步测量的数据处理时,将构成三维阵列的两块平面阵列,视作在相同工况下两次互相独立的声学测量的设备,分别对所测得的数据使用3D Beamforming算法单独进行处理,然后对所得出的两个三维声压矩阵进行叠加平均处理后,再转化成PSD的结果输出,对频率为2 076 Hz的声源进行识别定位的三维切片图如图19(a)所示。选取=012,=-008,=0.06的位置进行切片,则各个方向切面上的声源分布与该方向上起落架的相对位置如图19(b)~19(d)所示,与同步测量结果相比,尽管非同步测量的声源云图分辨率有所下降,且旁瓣水平较高,但几乎没有虚假声源,且声源强度最大点的位置与3D CLEAN-SC算法与同步测量方式处理后的结果基本一致。
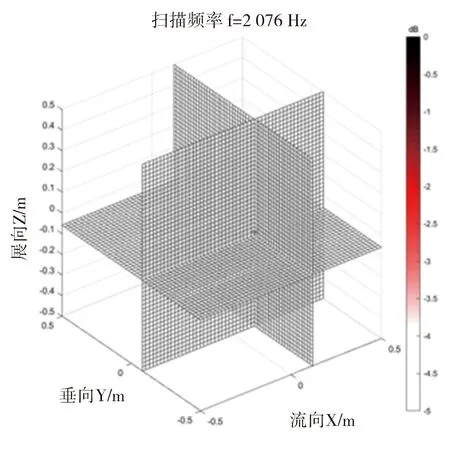
(a) 三维切片图
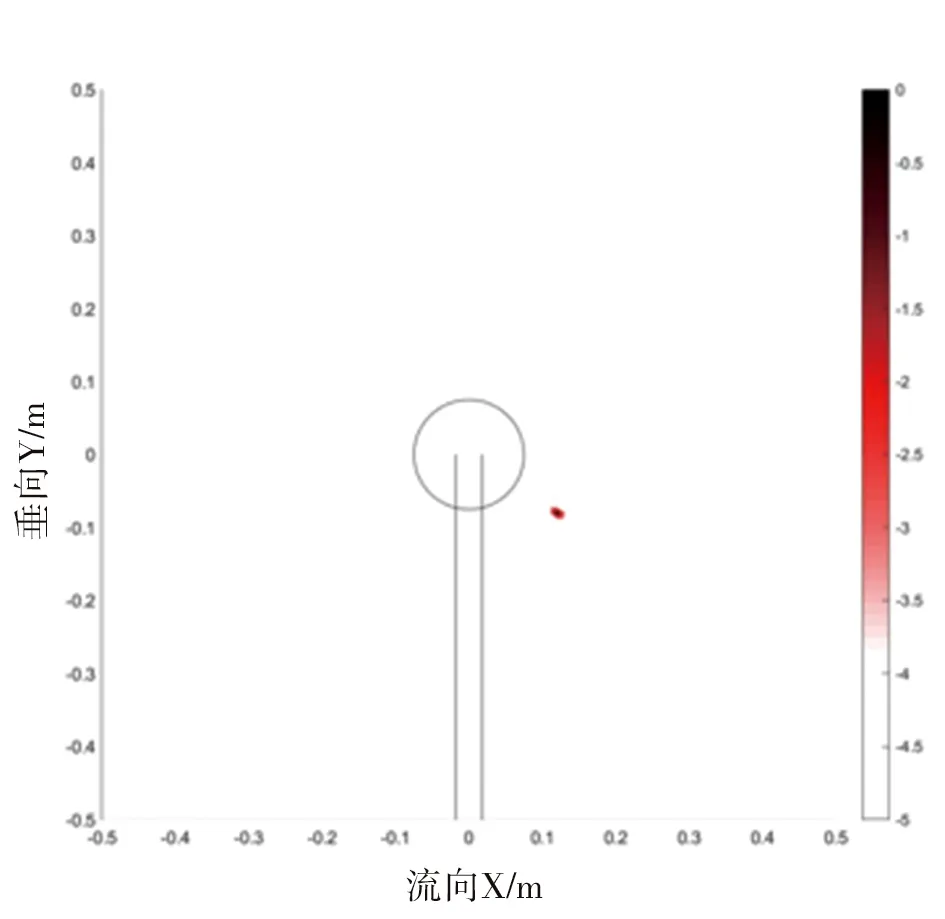
(b) z轴方向
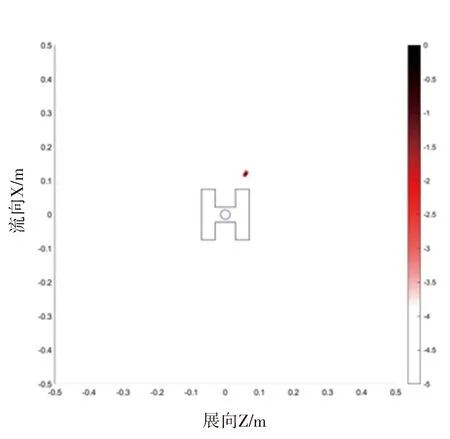
(c) y轴方向
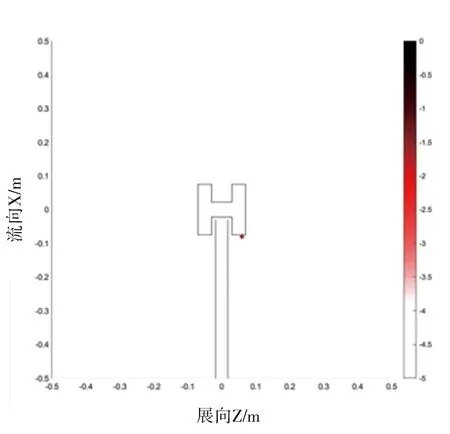
(d) x轴方向图18 三维阵列在各个方向的声源识别结果(同步测量,3D CLEAN-SC,2 076 Hz)
(a) 三维切片图

(b) z轴方向
(c) y轴方向
(d) x轴方向图19 三维阵列在各个方向的声源识别结果(非同步测量,3D Beamforming,2 076 Hz)
3 结论
起落架的气动噪声具有三维分布的特性,因此为了在风洞实验中获得更全面精准的声源信息,本文使用了三维麦克风阵列和三维声成像算法对其进行研究。
通过对3D CLEAN-SC算法以同步测量方式处理和3D Beamforming算法以非同步测量方式处理的识别定位结果进行比较,发现这两种方式均能准确定位声源位置,并具有良好的空间分辨率;但与同步测量相比,尽管非同步测量降低了麦克风数量,旁瓣却明显大于同步测量,同步测量结果的分辨率较好。
在此基础上,通过三维阵列对起落架侧边远场频谱中2 076 Hz的离散声进行声源识别定位,确定主要噪声源的位置位于起落架机轮下沿附近、流向的下游处,给出了更为全面精确的声场信息,对大型飞机起落架的降噪设计提供了新的借鉴和思考。
猜你喜欢
航空学报(2022年2期)2022-03-29
中原商报·科教研究(2021年6期)2021-05-13
现代信息科技(2021年21期)2021-05-07
移动通信(2020年9期)2020-11-06
现代电子技术(2020年3期)2020-08-04
百科探秘·航空航天(2020年8期)2020-07-29
百科探秘·航空航天(2020年6期)2020-07-09
发明与创新·中学生(2019年1期)2019-03-23
中学生数理化·八年级物理人教版(2016年8期)2016-12-24
建筑工程技术与设计(2015年33期)2015-10-21