应用多个非球面优化鱼眼镜头的方法
2022-07-10 09:27:34高冰冰吕丽军
光学仪器 2022年3期
高冰冰,吕丽军,曾 涛
(上海大学 精密机械系,上海 200072)
引 言
对光学系统而言,像差是影响其成像质量的主要因素[1],然而光学系统的像差通常会随着光束打在光学面上的入射角的增大变得愈发严重。随着非球面在各类光学系统中的广泛应用,应用非球面可以有效控制像差、改善光学系统成像性能也成为了人们的普遍认识[2-3]。Miks等[4]提出了一种包含一个或两个非球面光学表面的镜头的简单设计方法,在指定物、像位置上可以有效校正球差并减小彗差的贡献。非球面不仅在轴对称光学系统中被广泛应用,在众多的鱼眼镜头优化设计[5-6]过程中也被广泛应用。张宝龙等采用非球面技术,用仅四片透镜就实现视场角为210°的超广角鱼眼镜头设计要求[7]。然而,应用像差分析的方法在光学系统中选择最适非球面位置及确定非球面系数初值的方法鲜有讨论。
对于鱼眼镜头这类超大视场光学系统,其在很多场合例如无人驾驶、安全监控等[8-12]方面都有着广泛的应用。但由于在其工作环境中,物点发出的光束会以很大的入射角进入光学系统,这种掠入射光束经光学系统成像后,在子午和弧矢平面内的聚焦位置和波阵面参数可能完全不一致,波前的形状将严重偏离球面,具有平面对称光学系统的成像特性。赛德尔理论只能用于常规的轴对称光学系统的近轴像差分析,不再适合此类系统。近年来,LU等采用超环面作为参考波阵面,发展了适用于平面对称光学系统的波像差理论[13-14],可以被用来分析包括非球面系数在内的光学系统的结构参数对成像性能的影响,从而为寻找最适非球面奠定理论基础。
本文首先阐述了LU的平面对称光学系统像差理论的理论基础,接着阐述鱼眼镜头光学系统中各光学面上各类波像差分布的计算方法,然后针对一个全球面鱼眼镜头实例,根据所建立的系统成像性能评价函数随非球面系数改变的变化规律,确定非球面位置以及非球面系数的初值,随后重新计算光学系统的波像差分布,并与原先系统的波像差分布图进行对比,最后应用基于调制传递函数(MTF)作为评价函数的自适应归一化实数编码遗传算法,优化该鱼眼镜头实例。
1 理论基础
1.1 LU的波像差理论
LU应用波像差方法是针对平面对称光学系统在子午和弧矢方向上焦点可能完全分离的特点,以超环面作为参考波阵面,发展出的适用于平面对称多元件光栅系统的像差理论,并根据光线几何,通过多项式拟合的方法求得光线在光学元件表面和入射及像差波阵面之间的映射关系,导出精确的平面对称光学系统的波像差表达式,再由波像差求得光学系统的像差表达式。该理论可以精确处理一般的平面对称多元件光学系统的像差,并且可以应用于研究各种面形的反射镜、光栅和像平面在任意位置上的光学系统的成像。
由文献[13]可以知道,平面对称光栅系统的波像差W与物方空间波像差Wobj、像方空间波像差Wima以及受光栅刻槽影响的光程差S相关,具体表达式如下:

式中:S=nmλ , λ 为光的波长,n为光栅刻槽的槽数;m为光栅的衍射级,m=0,±1,±2,··· 。可将式(1)右边写成四阶波像差系数wijk的形式:

式中: (x,y) 为光线打在光学面的坐标;u为物点到光学面连线与光轴的夹角。关于波像差系数wijk以及具体应用可参见2.1节内容。
LU波像差理论只涉及到孔径像差如彗差波像差、球差波像差的计算,而对场曲波像差及色差波像差的计算方法未有深入研究。该理论在近年被FAN[15]等补充,使得该理论可以利用解析的方法精确计算出光学系统中除畸变外的所有像差,为寻找最适非球面奠定了理论基础。
1.2 光学表面的面型系数
在超大视场光学系统(如鱼眼镜头)中将光学元件表面定义为二次圆锥表面,应用平面对称像差理论计算波像差时需要以主光线打在光学元件表面的位置为坐标原点O,这样就需要转换坐标。图1所示为一条主光线经过一个二次圆锥光学面反射后的光路图:将坐标方程从以O′为坐标原点的x′y′z′坐标系转换至以O点为坐标原点xyz坐标轴[16];y轴和y′轴均垂直于纸面向外; α和 β 分别表示入射角和反射角; ωi-1和 ωi分别为第i光学面的入射和出射光线与光轴的夹角,即视场角,其中,i=1,2,··· 。

图1 光线经二次圆锥表面反射时坐标转换示意图Fig.1 Schematic diagram of coordinate conversion when light is reflected by a secondary cone surface
以O′为坐标原点的坐标系x′y′z′绕光轴z′旋转的二次圆锥曲面方程为:

式中:R0是二次圆锥曲面在坐标原点O′处的曲率半径,即;a2是确定二次圆锥曲面类型的系数,即非球面系数,当a2>0 时为双曲面,当a2=0 时为抛物面,当 - 1<a2<0 时为长椭球面,a2=-1 时为球面,a2<-1 为扁椭球面。a2与Zemax软件中表示非球面特性的圆锥系数k的转换关系为:

设O点在平面坐标系x′O′z′下的坐标为,x轴为主光线相交于光学元件表面O处的切线,z轴为O处的法线。根据图1所示,将坐标系xyz转换为x′y′z′的表达式为:

同时,从图1的几何关系可以得到:
将式(5)和(6)带入式(3),并作四阶泰勒级数展开,就可以得到适用于四阶波像差理论的二次圆锥曲面的方程:

式中,ci,j为面型系数,具体可参见文献[16]。
由图1的几何关系可知O点处光学元件表面的子午方向的曲率半径 Γ 和弧矢方向的曲率半径ρ 分别为:

对于有由多个光学面组成的光学系统,从第i光学面到i+1 光学面的坐标传递方程s0的表达式为:

式中di是从第i光学面到第i+1 光学面在沿光轴的光学间隔。
通过以上推导内容可将一般平面对称二次圆锥曲面系数转换为LU的平面对称光学系统像差理论中的面型系数形式。
1.3 主光线传输方程
应用LU的平面对称光学系统波像差理论计算光学系统波像差时还需要追迹出各光学面的主光线参数,包括入射角 αi,折射或反射角 βi,视场角 ωi等参数。图2所示为一条主光线在子午平面内的传输示意图:依次穿过光学介质的折射率分别为ni-1,ni和ni+1; ωi的符号与主光线相对光轴的斜率一致; αi, βi的符号与主光线相对于入射坐标系的法线斜率一致;第i到第i+1 光学面的光学间隔为;光学面右侧为正,反之为负;光学面曲率半径的符号规定为圆心在光学面右侧为正,反之为负。

图2 主光线传输示意图Fig.2 Schematic diagram of principal light transmission
由图2可得,主光线经过任一光学面的传输方程为[16-17]:

上述理论及推导为计算鱼眼镜头中的波像差提供了理论基础。
2 波像差计算
2.1 孔径像差波像差
对于由g个光学面组成的超大视场平面对称光学系统,应用式(2)即可满足其计算精度,由于没有光栅,其表达式为:

其中:

其中:Mij0为波像差系数,参考文献[18]中有详细讨论;表示第i光学面在像空间的子午和弧矢焦距,根据准基理论w200=0 和w020=0计算而来[13,19],表达式为:

第i+1 光学面沿主光线在子午方向的物方焦距rM(i+1)和弧矢方向的物方焦距rS(i+1)分别为:


在四阶波像差理论中,任一光学面球差波像
2.2 主光线像差波像差
由g个光学面组成的光学系统在子午方向和弧矢方向的场曲波像差分别由以下公式计算而来[15]:

由g个光学面组成光学系统的轴向和垂轴色差波像差,计算分别如下[15]:


在式(6)~(23)中,(xi,yi)为光束投影到第i光学面上的孔径坐标,由孔径光阑半径逐一线性传递所得:

其中:

由波像差的叠加原理可知第g光学面的主光线波像差为:

应用式(26)可以计算光学系统中每一光学面的各类波像差的分布,并且可以得到系统波像差随非球面系数的变化规律,从而选出对非球面系数变化较为敏感的光学面。
3 利用非球面优化鱼眼镜头
3.1 定义评价函数
在视场范围内取 µ 个物点对鱼眼镜头光学系统成像性能进行数值评价,该评价函数是将第2节所计算的波像差转换到像面上的像差Q,表达式为[15,20]:

式中: εk、ηk和 µk分别表示各自的权重系数,是根据具体光学系统像差分布决定的;Qx(k)和Qy(k)表示第k视场角的孔径像差分量k=0, 1 ,2,··· 。分别在光束覆盖的区域范围内进行积分求和:
式中:Wq和L分别表示孔径光束在最后光学面上沿子午x和弧矢y方向的投影长度,由于光束在子午和弧矢平面内的焦点位置不一致,圆形的孔径光阑传递至各光学面的投影均为椭圆形,故上式中的积分区域为椭圆域;x′和y′表示光线在像面上的像差表达式,分别计算为:

其中:dij0和hij0表示像差系数,详细在文献[13]中讨论,其中已包含离焦像差,即子午和弧矢方向场曲对成像性能的贡献。
Qη(k)和Qc(k)分别表示第k视场角光学系统的轴向色差和垂轴色差的评价函数,即轴向色差和垂轴色差在成像面上的贡献分量,计算表达式为:

3.2 单个非球面优化
在光学系统优化中加入非球面,就能在传统全球面优化的基础上多出一个或多个优化自由度,从而能得到更好的结果。由于非球面制造及成本原因,如何选择正确的光学面作为非球面是一个非常值得研究的问题。
为研究如何寻找适合系统优化的最适非球面,需要通过前述理论计算研究光学系统中各光学面的波像差分布以及波像差随非球面系数变化的规律,下面以一个实际光学系统为例研究变化规律。该系统的视场角为 2 ω=220 °,F=2.8 ,该光学系统来自于文献[21],光路示意图如图3所示,相关系统参量见表1 Original栏。

图3 鱼眼镜头光路示意图Fig.3 Schematic diagram of optical path of fisheye lens

表1 全球面鱼眼镜头的光学参量Tab.1 Optical parameters of all spherical fisheye lens
由于在优化过程中,为了用较短的时间得到优化结果,参数优化范围并不是特别大,因此优化后的光学系统结构及光路较原系统变化较为微小,反映在图像中是无法进行区别的,并且非球面系数的变化也无法在图中显示出来,因此本文中其余优化结果的结构及光路均可参照图3。
对于一个光学系统而言,非球面应当选择对整个系统影响较大的那个面,若其作为非球面对系统的影响可以忽略不记(即MTF曲线在其作为非球面和球面时变化不大),即可认定其不适合作为非球面。据此,以光学面对非球面系数的敏感度(系统成像性能随其非球面系数变化的剧烈程度)作为选择非球面的依据,具体过程如下。
首先可由第1、2节关于波像差的计算公式得到系统中各个光学面的波像差以及系统总体的波像差分布规律,根据式(19)~(22)以及式(26)可得到每个光学面的波像差分布特点,结果如图4,图中所示为视场角 ω0=110 ° (最大视场物点) 时各光学面的波像差分布。
其中:WM和WS分别为场曲波像差在子午和弧失方向上的分量;WCL和WCT分别为轴向和垂轴色差波像差;Wsph和Wcoma分别为球差波像差和彗差波像差。

图4 原始波像差分布Fig.4 Original wave aberration distribution
从图4中可以看到虽然系统中有几个面的场曲波像差(子午)、球差波像差和彗差波像差较为显著,但系统本身已经对其做出了矫正,最终像面上的像差还在合理范围内。根据波像差分布情况可以决定Q值权重系数,由于该光学系统球差、彗差等孔径像差较为突出,而垂轴色差及轴向色差较小,因此可令εk=2、ηk=0.5 和µk=0.5 。
接下来应用式(27)~(32)依次分析光学系统成像性能Q随各光学面的非球面系数a2变化的规律。a2的遍历范围为 ( -3,1) ,变化步距为0.001;取 0 °、 10 °、 2 0 °、 3 0 °、 4 0 °、 5 0 °、 6 0 °、70 °、 8 0 °、 9 0 °、 1 00 °、 1 10 °这 12个 视 场 物点;Q值随非球面系数变化的规律如图5所示,在a2的遍历范围内,第6、8和9面为非球面时系统的Q值变化幅度较大。达到极小值时对应的a2值见表2。

图5 鱼眼镜头的成像性能随非球面系数变化的规律Fig.5 The imaging performance of fisheye lens changing with the coefficient of aspherical surface
图6是第9面作为非球面,非球面系数a2(9)=-1.109 时对应的波像差分布。
从表2中可以清楚的看出,在将第9面作为非球面后,评价函数Q的值下降较为明显。对比图6和图4,可以验证系统总的像差是降低的。因此,通过改变光学元件的面型,找到合适的非球面系数,能够优化光路传播、调整系统波像差分布情况,使最终成像性能得到提升。在上述步骤中,利用本文提出的方法可以找到合适的非球面位置及其初始非球面系数,之后需要结合其余光学参量进行优化,确定结果是否符合期望。
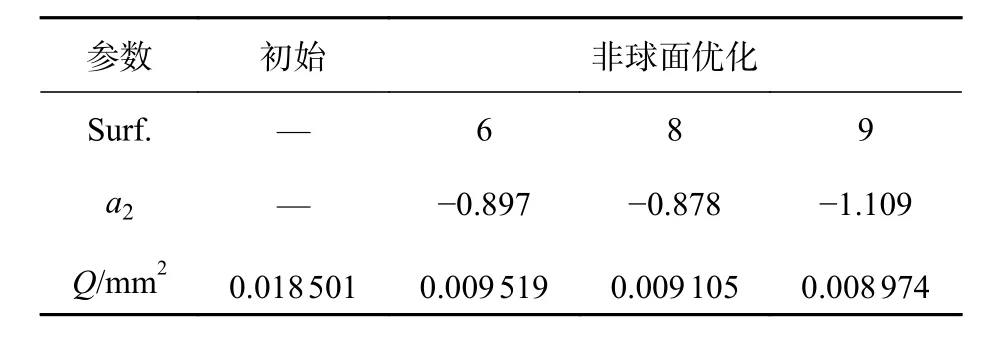
表2 系统初始Q值及非球面系数对应Q值Tab.2 The initial Q value of the system and the corresponding Q value of the aspheric coefficient

图6 第9面为非球面时的波像差分布Fig.6 Wave aberration distribution when the ninth surface is aspheric
原始光学系统视场角虽然为 1 10 °,但其原始MTF曲线未能显示 90 °以后的曲线,因此先进行了一轮全球面优化。所得到的MTF曲线图见图7,优化后参数见表1 Optimize Ⅰ栏。在图7中,MTF曲线图是在Zemax中应用快速傅里叶变换(FFT)方式得到的;在子午(Mer.)和弧矢(Sag.)方向空间频率分别取10 lp/mm 和30 lp/mm;经过全球面优化后各个视场下的MTF曲线均有所提高且 90 °之后的曲线图也能显示出来,说明在全球面优化后的系统已能在 1 10 °视场内有良好的性能。

图7 全球面优化后的MTF曲线图Fig.7 All spherical optimized MTF curves
我们应用以MTF作为评价函数的自适应归一化实数编码遗传算法[22-23]优化该实例镜头。此次优化遵循先进行大范围多代数粗略搜索参数如下:种群规模设为100;交叉概率为0.8;初始变异概率为0.1;求解精度为0.001;优化800代;范围设置为初始参数的±50%;优化20次。从结果中选择优化较好的5个系统的参数值作为小范围精确搜索的初始值,此时,其余参数不变,只将优化代数缩小为200代;搜索范围为±(10%~20%);每组优化10次;选取MTF最高的参数作为最终系统[16]。以第9面为例进行单个非球面的优化,优化后的MTF曲线如图8所示,各光学面参数见表3 Optimized Ⅱ。表3相较于表2增加了非球面系数(Aspheric coefficient)一项,并且由于材料与折射率均未改变,因此未在表3中列出。
图8相较于图7,第9面作为非球面优化后,MTF曲线较全球面优化后提升较多,视场角在90°之前曲线平滑,下降缓慢,成像质量优良,在90°之后出现骤降,说明在大视场下成像质量不是很好,但相较于全球面优化仍然有所提升,说明本文提出的方法对于非球面的选取是有效的,对于大视场下优化结果较差的情况,可以考虑通过增加非球面个数尝试解决。

图8 第9面作为非球面优化后的MTF曲线图Fig.8 The optimized MTF curve when the 9th surface is used as an aspheric surface
3.3 同时进行两个非球面优化
由3.2节的结论可以看出,在对光学系统进行优化时选择对非球面系数变化较为敏感的光学面作为待优化的非球面能够有效降低系统像差,并得到较好的MTF曲线。这对单个非球面是有效的,因此可以考虑将之运用于多个非球面优化系统中,以下将采用两个非球面优化该系统。
采用多个光学面作为非球面时,由于前一个光学面的非球面系数改变将会导致在它之后光路发生变化,光线到达下一个非球面时的位置与理论不符,因此,多个非球面参与优化时,最终优化结果并不是单个非球面影响的叠加,需要得到多个非球面共同作用下对系统整体的影响。图9为几组两个非球面组合时系统Q值的变化规律图。

表3 加入非球面优化后的系统光学参数Tab.3 Optics parameters of the system after adding aspheric surface optimization
依据图5,在本文中将待选非球面分为两类:一类是对非球面系数变化敏感度较低的光学面(下简称为非敏感面),如第11、12面;另一类为对非球面系数变化敏感度较高的光学面(下简称敏感面),如第6、8面。在对两个非球面组合时得到的Q值变化图中,发现当两个非敏感度面组合时,如图9(a),其系统Q值变化微小;两个敏感面组合时,如图9(c),其系统Q值变化较为剧烈;而敏感面与非敏感面组合时,如图9(b),系统Q值变化规律趋向于与敏感面的变化相同。
由此,在多个光学面作为非球面参与优化系统时,仍然是敏感面对改变系统像差的贡献较大,因此可以确定在用多个非球面优化系统时仍应采用对系统Q值影响较大的光学面作为待选非球面。在本文中将第6、8和9面两两组合得到三种优化组合,表4列出了三种方案的最小Q值及对应的非球面系数,图10为第8、9面为非球面时对应的波像差分布图。
对比表2和表4,相较于加入单个非球面,加入两个非球面时,系统Q值进一步降低,比单个非球面时下降了大约23%。从图10中可以看出,第8面和第9面作为非球面后其波像差下降较为明显,而图6中第9面单独作为非球面时对自身波像差影响较小,说明多个非球面组合可以有效的抑制自身波像差,优化像差分布,进一步降低系统像差,提升成像质量。从表2可以得出,在加入单个非球面时系统Q值降低大约为50%,而在此基础上再加入非球面系统Q值下降幅度变小,说明随着非球面个数的增加,其对系统优化的能力会越来越低,最终可能导致再增加非球面个数也无法提高成像质量。
之后,仍以 MTF作为评价函数的自适应归一化实数编码遗传算法优化该镜头,步骤及参数与单个非球面优化时相同。经优化得到最终结果为第8面非球面系数为a2(8)=-1.646 ,第9面非球面系数为a2(9)=-1.092 时系统的MTF曲线最好。优化后的系统参数见表3 Optimized Ⅲ栏,优化后的MTF曲线如图11所示。

图9 系统中两个光学面作为非球面时系统的Q值变化图Fig.9 The Q value change diagram of the system when the two optical surfaces in the system are used as aspherical surfaces

表4 两个光学面组合所得最小Q值及对应的非球面系数Tab.4 The minimum Q value and the corresponding aspheric coefficient obtained from the combination of two optical surfaces
从图11中可以看出:第8和第9面作为非球面优化后,光学系统的MTF曲线较为平滑,未出现陡降,平均MTF值在0.5以上,最低处也大于0.3;与图7、8相比MTF曲线整体上移,90°视场角后的曲线也较好,下降幅度不大,说明两个面作为非球面优化更能兼顾大视场成像。因此相较于单个非球面优化,多个非球面优化结果更好。

图10 第8面和9面作为非球面时系统波像差分布图Fig.10 The distribution of the system wave aberration when the 8th and 9th surfaces are used as aspherical surfaces
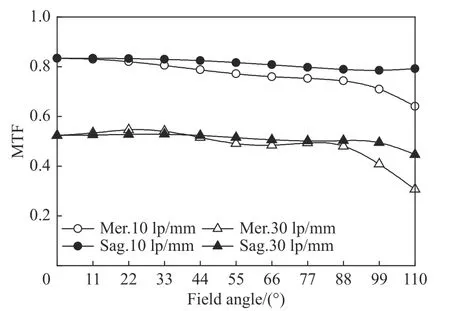
图11 第8、9面作为非球面优化后的MTF曲线图Fig.11 The optimized MTF curve when the 8th and 9th surfaces are used as aspherical surfaces
4 结果讨论
所采用的LU的四阶波像差理论,其对于大视场小孔径光学系统波像差计算较为精确,但当孔径较大时计算精度有所下降,结果可能偏离实际。目前六阶波像差理论尚未完善,无法用于本文中的理论计算,可以期待六阶理论完善时,结合本文提出的方法对大孔径光学系统进行更精确的计算研究。对于第6、8和9面三个光学面组合优化,本文尚未进行探讨是否会有更好的结果。对于在光学系统中加入非球面进行优化虽然能有效改善系统成像质量,但随着非球面的增多,再增加非球面个数最终可能会使成像质量的提升微乎其微甚至下降,因此优化时选择非球面的个数也是值得研究的。
5 结 论
本文基于LU的平面对称光学系统的像差理论,发展了一种有效确定非球面位置的方法,从而可以为超大视场光学系统的设计优化提供指导方法。该方法通过寻找非球面系数对系统成像质量影响较大的光学面,采用单个对非球面系数敏感的光学面或多个敏感面之间的组合作为非球面参与光学系统的优化可以有效的降低系统像差,得到较好的MTF曲线图。
本文通过实例验证了该方法的有效性,并且在优化光学系统时通过增加非球面的个数可以有效提升优化效果,并且多个非球面组合时,其对超大视场的优化明显优于单个非球面优化的结果,通过两个非球面组合优化得到了比单个非球面更好的结果,确定了该方法可以应用于复数非球面系统的优化,进一步增加了可以参加系统优化的变量,为光学系统的优化提供了新的思路。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31 08:58:24
中国光学(2021年6期)2021-11-25 07:48:32
中国医疗设备(2019年1期)2019-01-15 12:10:54
航天制造技术(2016年6期)2016-05-09 08:32:43
激光与红外(2015年10期)2015-03-23 06:07:18
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:58
中国光学(2012年3期)2012-10-30 08:48:54
长春理工大学学报(自然科学版)(2012年4期)2012-07-05 08:41:28
计算机应用文摘(2010年18期)2010-04-29 06:57:46
幸福(2004年21期)2004-04-29 03:13:33