
棱镜式激光陀螺零偏补偿方法
2022-07-10 09:59:56马家君胡珍妮
兵器装备工程学报 2022年6期
崔 娟,马家君,胡珍妮
(1.西安交通工程学院 公共课部, 西安 710300; 2.贵州大学 大数据与信息工程学院, 贵阳 550025)
1 引言
棱镜式激光陀螺中,在棱镜中通过的光路较长,其零偏受温度的影响较大。为提高棱镜式激光陀螺的稳定性,有必要对其零偏进行补偿。自21世纪以来,国内外在成品激光陀螺中的温度补偿的研究取得了一定的进展。国内如清华大学的吴国勇,顾启泰等研究激光陀螺各部件对温度冲击的响应分析了相对影响的大小,发现可通过和频变化对激光陀螺零偏进行补偿。国防科大的张鹏飞等研究了集抖激光陀螺的零偏和多温度点的关系,利用逐步回归法得到温度补偿模型。中航的张震提出了利用有限元建立了陀螺的温度场仿真分析,考虑温度补偿模型的环境适应性,利用捷联惯导系统标定技术得到系统安装误差与温度之间的关系。西安电子科技大学的徐文强针对于全发射棱镜式激光陀螺,发现温度变化是零偏误差产生的主要原因,结合零偏稳定性零偏误差分析方法,简化Allan方差误差分析模型,构建了零偏误差补偿的数学模型。上述研究工作给本文棱镜激光陀螺零偏补偿工作提供了一定的参考价值。
当前,还有很多学者做出了较为先进的研究成果。文献[5]中设计了激光陀螺的温度误差标定方案;文献[6]中进行棱镜式激光陀螺锁区特性分析及误差角补偿分析;文献[7]中实现了速率偏频激光陀螺惯导系统航向敏感误差分析与补偿。以上方法虽然减轻了零偏误差对棱镜激光陀螺输出信号的负面干扰,从而提升棱镜的瞄准精度,但是其尚未解决噪声影响的问题,优化棱镜激光陀螺的应用效果不佳。
本文中以补偿棱镜式激光陀螺零偏误差为研究核心,提出基于静、动温变结合棱镜式激光陀螺零偏补偿方法。利用二代小波变换函数分离激光陀螺噪声信号,实现信号滤波。在此基础上,分别建立静态和动态下的温度模型,分析激光陀螺两臂的温度梯度,利用多元线性逐步回归法分析变量对激光陀螺零偏的影响,建立零偏补偿模型。该方法在实验之中,被验证可有效补偿棱镜激光陀螺零偏误差,提升棱镜激光陀螺信号的信噪比,优化棱镜的瞄准精度。该方法和文献[5]与文献[6]中的零偏补偿方法的不同在于,其在补偿激光陀螺零偏误差之前,对棱镜激光陀螺信号进行全面滤波,能够提升棱镜激光陀螺信号纯净度,此举可大大提升棱镜激光陀螺零偏补偿效果。
2 基于静、动温变结合棱镜激光陀螺零偏补偿方法
2.1 棱镜激光陀螺零偏模型
结合棱镜式激光陀螺的特点,首先分析了其在变化的温度场作用下的变化,建立了相应的初始模型,零偏温度模型为:
=-(-)+*
(1)
其中:表示温度为时的陀螺零偏值((°)/h);、、表示拟合系数;表示参考温度;表示陀螺外壳温度。
在此基础上建立了二阶温度模型,零偏稳定性得到提高。其为:
(2)

2.2 基于二代小波提升算法的激光陀螺信号滤波
传统的小波变换算法是通过低通滤波器和高通滤波器实现信号的分解与重构。二代小波提升算法通过预测算子确定高频信息,初步确定低频信息,通过更新算子,修正低频信息。其不但可以得到和传统小波变换相同的应用效果,完成棱镜式激光陀螺噪声信号在差异频带中的分离,还可以设计非线性小波变换。
提升算法属于二代小波变换的重中之重,棱镜激光陀螺第-1个噪声信号是-1,将其通过小波变换能够分解成低分辨率逼近信号与激光波频细节信号,提升方法的核心步骤分别是分裂、预测以及更新。
221 分裂

(3)
其中,棱镜激光陀螺噪声信号序列-1的分裂过程是Split(-1)。
222 预测
通过预测,设置一个和棱镜激光陀螺信号数据集结构不存在关系的预测算子,=(),以此能够将噪声信号-1变成逼近信号。如果通过和预测值()的差值取代,这个差值便描述两者的逼近水平,预测误差越大越不好。若预测具有合理性,差值数据集存在的信息将比多。预测过程为:

(4)
其中,属于小波基,为棱镜激光陀螺噪声信号预测值和实际值的偏差值。
223 更新
如上所述获取的棱镜激光陀螺噪声信号的整体性质与原始噪声信号的-1性质存在差异,所以必须实施更新。更新过程是使用更新算子建立一个子数据集,和原始噪声信号的-1性质存在一定相似度。通过算子更新的方法是:

(5)
循环分裂、预测与更新:
{+1,+1}∶+1⟸+1-(+1)
(6)
+1⟸+1+(+1)
(7)
{+2,+2}∶+2⟸+2-(+2)
(8)
+2⟸+2+(+2)
(9)
其中,下标+2代表第+2个信号。
次分裂、预测与更新后,存在:
-1={+-1,+-1,+-1,…,}
(10)
则次分解完毕,原始噪声信号-1的小波描述成:
{+-1,+-1,+-1,…,}
(11)
其中,+-1是棱镜激光陀螺噪声信号的低频部分,剩下的代表棱镜激光陀螺高频部分。
如上所述的3个步骤主要用在棱镜激光陀螺原始噪声信号数据的分解和重建过程中。分解过程是:

(12)
棱镜激光陀螺噪声信号重建过程是:
(13)
棱镜激光陀螺噪声信号重建便可实现棱镜激光陀螺信号滤波,将噪声信号滤波为纯净信号。merge表示融合过程。
2.3 棱镜激光陀螺零偏补偿模型
在陆用、海用的导弹系统与非温控导弹系统中,外界环境温度波动不显著,激光陀螺温度变高主要是因为其运行发热、系统电源电路的升温所导致,温度变动速度不显著,温变速度与温度梯度不显著,对陀螺零偏存在的干扰主要是因为运行温度存在差异。其中,环境温度引起的偏振波动噪声具有周期性,当环境变化使得谐振腔相位差变化为π时,陀螺自运行温度变化约2 ℃。这时,能够使用2.1小节获取的激光陀螺纯净信号构建陀螺零偏和温度的多项式模型。结合零偏模型得出静态温度模型是:

(14)
其中:激光陀螺信号的零偏与零偏温度非相关项分别是、;激光陀螺腔体两壁温度均值与拟合系数分别是、。是阶次,可按照实际补偿精度设置。
模型标定模式为分两类,一类是仅取一组间隔具有特定性的温度点,在各个温度点中检测陀螺零偏,然后实施零偏和温度的多项式拟合。此类模式能够在各个温度点将全部和温度存在关联的补偿参数标定,全温标定通常都会采取此类模式。第二类模式是使用持续升温或降温的模式,让陀螺在变温氛围里循环运行,检测激光陀螺输出温度的关联性,直接实现模型拟合。因为温变速度较慢,标定时间便会增多。
静态温度模型对温度的变化较为关注,但没有分析温变速度与温度梯度的干扰,只使用静态模型未能补偿零偏突变。
232 动态温度环境中激光陀螺零偏补偿模型
当温变速率较快,模型里不仅需要考虑静态温度项,也要分析其他干扰陀螺零偏的温变速率与温度梯度。
在分析温变速率和温度、速度两者的交叉项因素时,能够构建三阶模型:


(15)

现实使用中,当温变速率较快,因为加热装置的均匀性较差,热气流的平衡性出现变化,温度场便会难以均匀化,激光陀螺中温度梯度便会变大,对激光陀螺的输出存在干扰。所以,不仅需要分析温度、温变速率,还要分析激光陀螺两臂的温度梯度因素,构建下述模型:
(16)
式(16)中存在多个变量,理论中能够采用Matlab里的逐步回归工具,通过多元线性逐步回归法分析变量对激光陀螺零偏的影响水平,去除影响不大的项,便可获取激光陀螺多项式温补模型。但实际使用时,差异型号、差异批次的激光陀螺温度特征并不一致,每项对激光陀螺零偏干扰的显著性也存在差异。结合式(2)得出偏补偿模型是:
(17)
其中:零偏温度非相关项是;温度变化项、温变速率项分别是~、~,温度变化项可描述激光陀螺零偏伴随温度的变化规律,温度速率可描述温度快速变化对激光陀螺零偏的作用;温度梯度项是~,可描述激光陀螺内部温度场的均匀性。
3 实验结果与分析
为测试本研究方法的使用效果,在Matlab软件中进行仿真测试。以2个009型号的棱镜激光陀螺信号为对象,在-40 ℃~+60 ℃温度范围内,考虑温度对激光陀螺信号影响最大的范围为-35 ℃~+35 ℃,分别在-35 ℃、-25 ℃、-15 ℃、0 ℃、15 ℃、25 ℃、35 ℃的7个采样点进行采样,设零偏稳定性为0.01 (°)/h,随机游走0.003 (°)/h 1/2,标度因数为2.3″/pulse,寿命大于10万小时,总损耗小于50 ppm,每个温度点的保温时间为1 h,平均线性膨胀系数仅为9.0×10℃,这保证陀螺在正常工作温度范围内,谐振腔因受热膨胀发生的形变在稳频系统补偿的可控范围之内。
根据实际情况,实时改变棱镜激光陀螺充气参数,增大放电毛细孔孔径,阴极和阳极放电孔径,减小激光陀螺的噪声电流,进而将零偏稳定性从0.01(°)/h提高到0.001 (°)/h,显著地提高了陀螺的测量稳定性,使得实验对象具有测量动态范围宽,性能稳定,线性度好,具有良好的温度稳定性和重复性,使用本文方法对其进行零偏估计与补偿。2个棱镜激光陀螺信号的零偏值如表1所示。
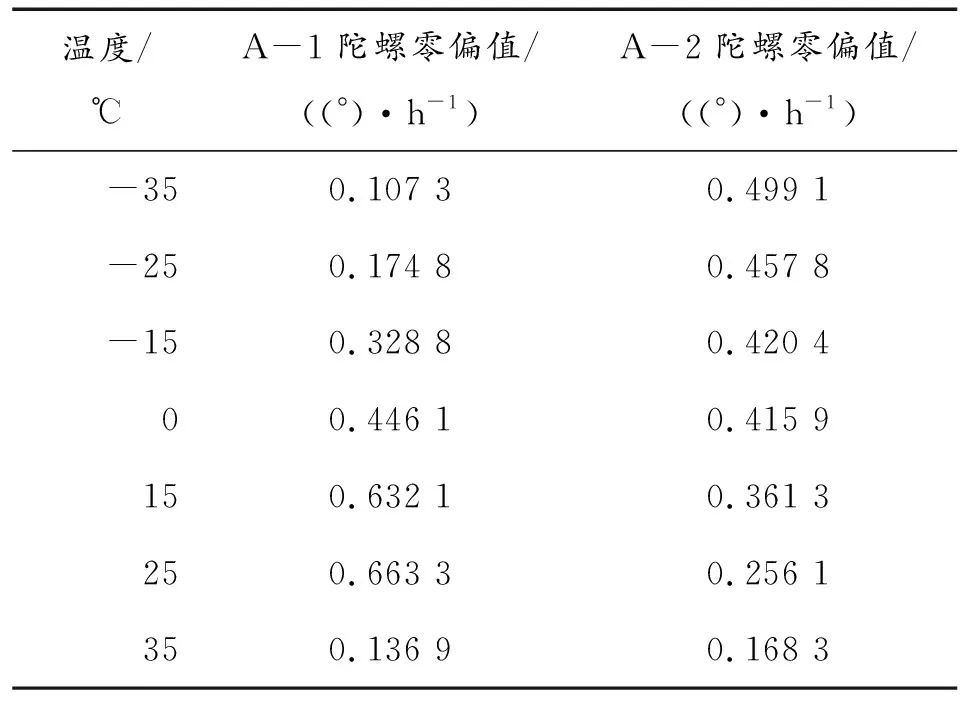
表1 A-1和A-2棱镜激光陀螺信号的零偏值Table 1 A-1 and A-2 zero offset of the signal of the missile aiming prism laser gyro
使用本文方法对A-1棱镜激光陀螺信号的零偏进行补偿,曲线如图1所示。由图1可知,A-1补偿前的零偏稳定性为0.037 4,补偿后的零偏稳定性为0.008 6,零偏稳定性提高了77.01%。由此可见,本文方法可有效补偿棱镜激光陀螺零偏,可提升棱镜激光陀螺的零偏稳定性。
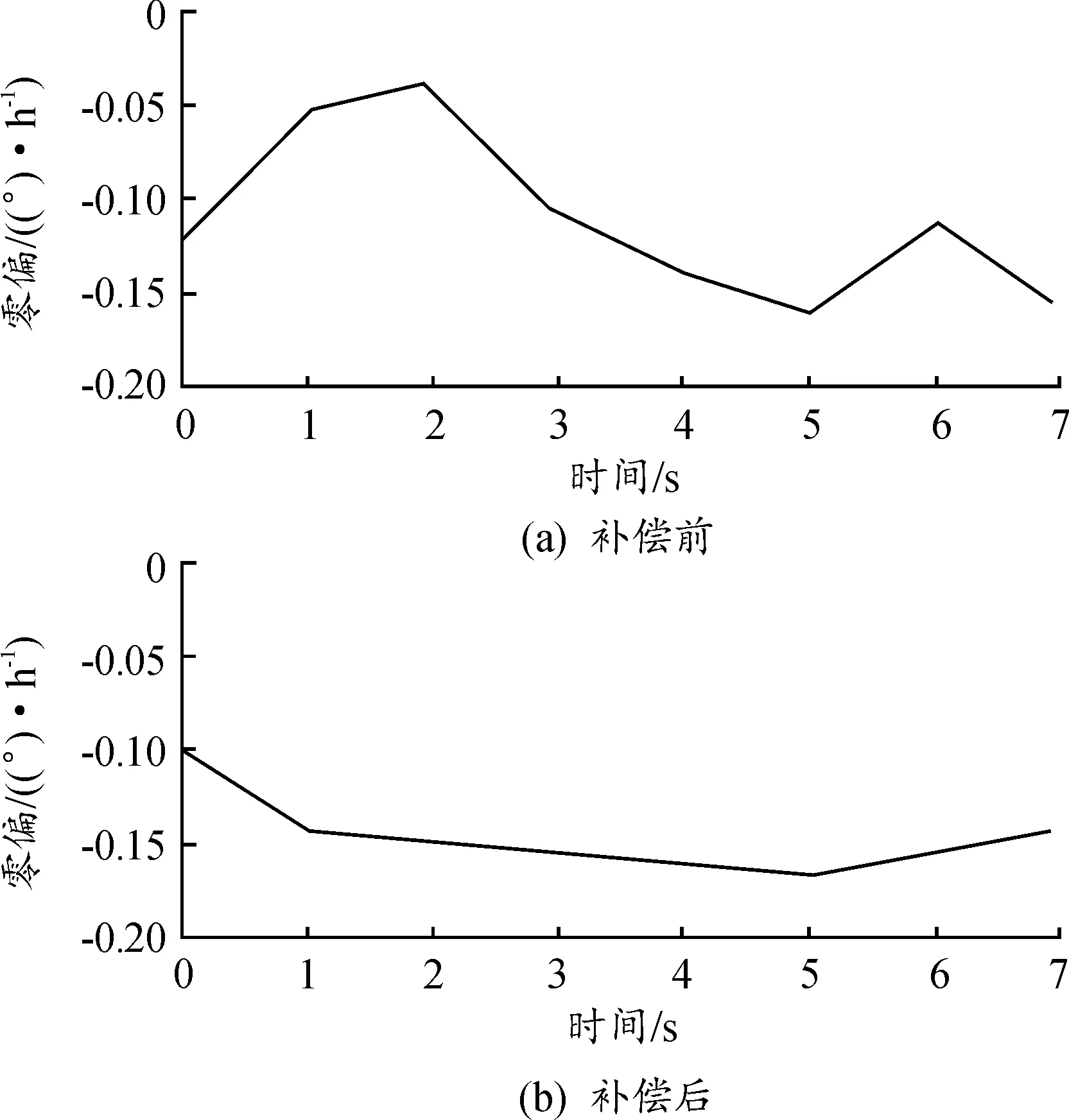
图1 补偿前后的激光陀螺信号零偏值曲线Fig.1 Zero bias curve of laser gyro signal before and after compensation
测试本文方法在补偿2个棱镜激光陀螺零偏之前,对2个棱镜激光陀螺信号的滤波效果。测试2个棱镜激光陀螺的相敏解调电路输出信号的信噪比,以此体现滤波效果,测试结果如表2所示。

表2 信噪比测试结果Table 2 Signal to noise ratio test results
分析表2可知,本文方法在补偿2个棱镜激光陀螺零偏之前,对2个棱镜激光陀螺信号滤波之后,2个棱镜激光陀螺信号的信噪比均明显提升,信噪比越高,表示2个棱镜激光陀螺信号的纯净度越高,本文方法的滤波效果越好。在不同温度环境中,2个棱镜激光陀螺信号滤波后,信噪比始终大于70 dB,并大于滤波前,由此可见,本文方法可有效实现2个棱镜激光陀螺信号滤波,可提升2个棱镜激光陀螺信号纯净度,这对激光陀螺零偏补偿存在积极作用,可提升激光陀螺零偏补偿精度。
为验证本文零偏补偿方法的性能,在测试棱镜激光陀螺的相敏解调电路输出信号的信噪比时,引入了文献[5]中的方法和文献[6]中的方法作为对比,其中,采用文献[5]中的方法和文献[6]中的方法得到A-1棱镜激光陀螺的相敏解调电路输出信号的信噪比结果如表3所示。
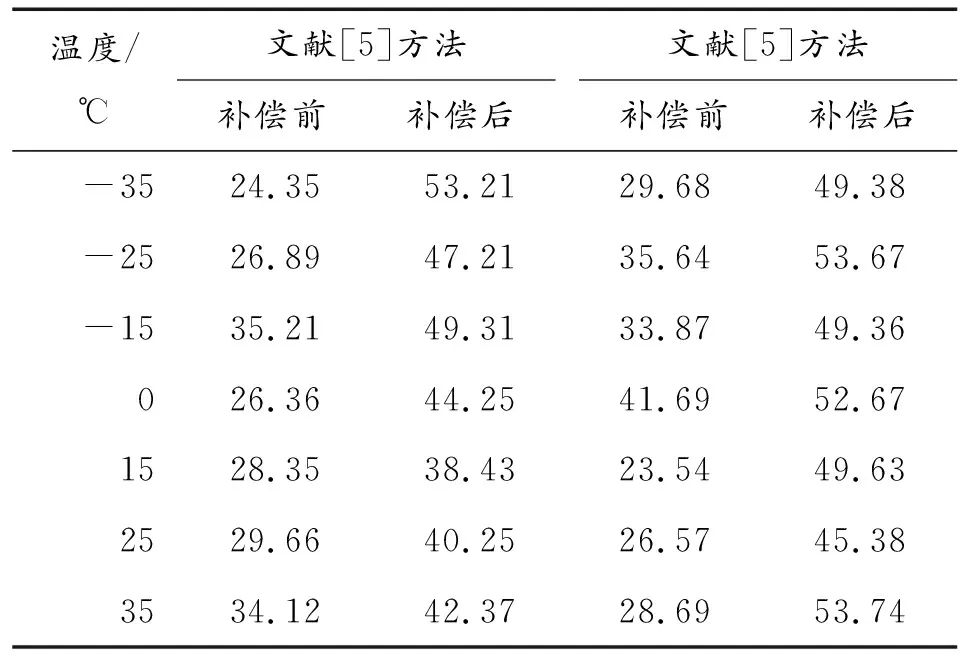
表3 其他方法下信噪比测试结果/dBTable 3 Test results of signal-to-noise ratio under other methods/dB
分析表3可知,文献[5]中的方法和文献[6]中的方法在补偿后,A-1棱镜激光陀螺的相敏解调电路输出信号的信噪比低于采用本文方法补偿后输出的信噪比,这表明本文方法能够有效滤波,输出信号的纯净度较高,具有较好的应用性能。
本文使用二次小波提升算法进行滤波前零点补偿,其主要补充效果即使用二次小波提升算法进行滤波后的零补偿效果如图2所示。
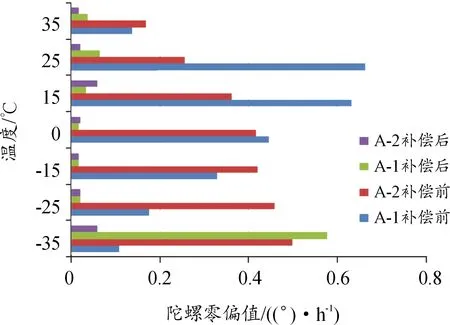
图2 滤波后零补偿效果的直方图Fig.2 Comparison results of zero compensation effect after filtering
分析图2可知,在不同温度环境中,其2个009型号的棱镜激光陀螺的补偿效果皆得到验证,最大差在0.6(°)/h,说明本文方法对棱镜激光陀螺零偏补偿后,可有效提升棱镜的瞄准精度,应用效果极好。
4 结论
棱镜激光陀螺在实际使用中,零位信号的变化值对此陀螺信号的输出特性存在直接影响,如果棱镜激光陀螺存在零偏,棱镜的瞄准精度将受到负面影响。为此,本文提出基于静、动温变结合棱镜激光陀螺零偏补偿方法。
1) 采用基于二代小波提升算法的激光陀螺信号滤波方法,将棱镜激光陀螺信号实施分解并重构,完成棱镜激光陀螺信号滤波。在静、动温变环境中,构建棱镜激光陀螺零偏补偿模型,实现棱镜激光陀螺零偏补偿。
2) 在不同温度环境中,研究方法对棱镜激光陀螺零偏补偿后,激光陀螺信号稳定性明显升高,在不同的温度环境中,稳定性始终保持为0.98,系统输出无明显漂移。在不同温度环境中,2个棱镜激光陀螺信号滤波后,信噪比大于滤波前,始终大于70 dB。补偿后的零偏值最大差为0.6(°)/h,大幅度提高了零偏补偿效果。
3) 本文方法可有效处理棱镜激光陀螺零偏补偿问题。
猜你喜欢
天水行政学院学报(2022年4期)2022-11-18 09:02:36
少儿美术(快乐历史地理)(2020年4期)2020-02-24 13:06:28
小学生学习指导(低年级)(2019年10期)2019-10-16 08:12:34
学苑创造·A版(2019年4期)2019-05-10 00:19:52
学生天地(2019年6期)2019-03-07 01:10:46
军事文摘(2018年24期)2018-12-26 00:58:18
快乐语文(2018年36期)2018-03-12 00:56:02
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18
物理实验(2015年8期)2015-02-28 17:36:41
