
倾斜摄影空中三角测量解算优化研究
2022-07-09 08:50:20杨朋荷
科学技术创新 2022年19期
杨朋荷
(三和数码测绘地理信息技术有限公司,甘肃 天水 741000)
近年来,测绘技术日新月异,尤其是无人机航空摄影测量技术,取得了快速的发展。无人机摄影测量目前主要有两种形式,一种是传统的垂直摄影测量技术,其作业时,通常搭载一个航摄仪,航摄仪垂直于地面进行影像数据的采集;另一种是倾斜摄影测量技术,该技术在近几年发展迅猛,其作业时,通常搭载多个航摄仪,从空中对地面进行多角度、全方位的影像数据采集。传统的摄影测量技术,影像在采集数据时,近似与地面垂直,获取的数据,在空三解算时,其模型符合传统的摄影平差模型,因此空三失败率很低。而倾斜摄影测量,由于其余地面的夹角大,平差模型与传统的摄影平差模型不符,因此倾斜摄影空中三角测量在解算时极易出现分层、弯曲、交叉等问题。针对倾斜摄影空中三角测量出现的问题,笔者在分析了其解算过程后,提出一些方案,来对倾斜摄影空中三角测量的解算进行优化,并通过实际案例对优化前后的结果进行对比分析。通过分析可知,本文提出的几种方案,对于空中三角测量的解算优化,其效果是比较明显的,可以有效提升空三的解算成功率,且解算的精度和效率也有一定的提升,可以有效解决倾斜空三解算的一系列问题,从而为倾斜摄影从业者带来借鉴。
1 倾斜摄影作业流程
倾斜摄影作业分为外业和内业,外业主要是获取数据,内业主要是数据处理。外业的工作主要包括测区勘察、资料收集、飞机选型、航线规划、像控点采集和航空摄影;内业的工作主要包括数据预处理、数据输入、空中三角测量解算、像控点转刺与平差、多视影像密集匹配、不规则三角网构建、白膜生成、纹理映射、格式转换与输出,具体的作业流程见图1。

图1 倾斜摄影作业流程
2 空中三角测量优化研究
空中三角测量解算,在同一个软件里,其解算的结果主要受输入数据的影响。输入数据主要包括影像数据、定位数据(POS)和相机参数。由于不同软件空中三角测量解算算法不一样,因此同一数据,不同软件解算结果也是不一样的。鉴于此,本文通过优化输入数据、多款软件组合使用的方法,对空中三角测量进行优化研究。在空中三角测量解算时,其主要的作业流程如图2 所示。
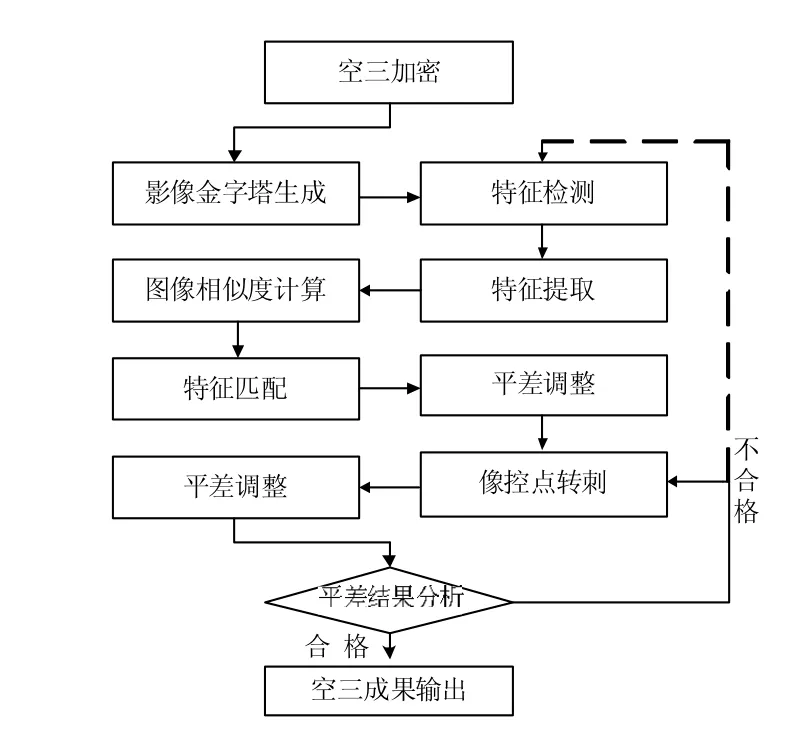
图2 倾斜摄影空中三角测量解算流程
2.1 优化相机参数
相机参数在数据解算中是非常重要的,相机参数主要涉及到相机的内方位元素,通过不同方式获取相机的精准参数,可以有效提升空中三角测量的解算成功率。
2.1.1 通过多次解算不断优化相机参数
空中三角测量解算的过程,主要包括特征点的提取与匹配,再进行平差。平差其实是对匹配的特征点进行优化的一个过程,通过平差优化,从而对相机的内方位元素进行优化。在某些软件中,在进行空中三角测量解算时,通过多次不断地提交空三任务、解算空三任务,从而使得空三解算成果可用。
2.1.2 通过检校场完成相机参数的标定
精准的相机参数,主要的获取方式是通过相机检校场。相机检校场的靶标是具有三维的靶标,利用无人机携带多镜头航摄仪,对相机检校场进行拍摄,然后利用专业的相机参数检校软件,通过拍摄的检校场影像,对相机的内方位元素和径向畸变系数、切向畸变系数进行准确解算,从而得到高精度的相机检校参数,从而提升空中三角测量解算的成功率和精度。
2.1.3 通过少量照片来获取准确相机参数
在数据解算时,少量影像解算容易通过,而大量影像解算则很容易失败。通过对解算前后的相机参数进行对比可知,当空三解算成功时,其参数趋于稳定,不再随着解算进行改变。因此可以通过此方法获取较准确地相机参数。首先选择部分照片进行空三解算,通过多次解算,其参数趋于稳定,则将优化后的相机参数作为输入数据进行大量影像解算,这样也可以有效提升影像解算成功率。
2.2 优化定位数据
无人机搭载的航摄仪在空中进行拍照时,搭载的定位定姿装置就会将相机曝光时的位置和姿态记录下来。目前无人机姿态稳定性差,在实际作业中,一般只利用其定位数据,因此定位数据质量的高低也影响着空中三角测量的解算结果。
2.2.1 基于下视镜头POS 求解其余镜头的POS 值
目前无人机搭载的多镜头航摄仪,其记录POS 的装置只有一套,并且记录的POS 是下视相机曝光时的位置,并没有记录其它镜头的POS 数据。在数据解算时,通常都是以下视镜头POS 来代替其它镜头的POS。这样在数据解算时,并不能还原摄影时相机之间的准确位置和姿态,这样不利于影像的准确解算。多个相机之间的关系可通过平台安置参数获得,通过分析平台安置参数,可以对侧视镜头的POS 数据解算。利用C# 语言开发POS 解算软件,以下视镜头为标准,对其余镜头进行解算。为了解算软件的通用性,在软件开发时,结合2 镜头、3 镜头、5 镜头等相机的特点,将输入的参数设置为可输入项,提升了软件的通用性。通过解算可以获得精度更高的POS,有助于空中三角测量的解算。
2.2.2 以下视镜头POS 为参考来约束侧视镜头数据
在上海瞰景软件中,有这样的选项,其目的就是提升空中三角测量解算的成功率,避免空三分层。其原理是在数据解算的时候,其余镜头的数据,都已下视镜头的数据为参照,就是在平差的时候,不但参考了POS 数据,而且也参考了下视镜头的影像,从而确保解算的数据在同一平面上,提升了空三的解算成功率。
2.3 优化影像质量
对于内业来说,提升影像的质量,主要包括去掉影像的畸变和提升影像的亮度和对比度,这样在数据解算的时候,可以得到更精准的加密点,从而提升数据的解算精度和成功率。
2.3.1 基于蒙板降低影像畸变的影响
基于蒙板主要的作用是减小影像的畸变,但实际上并不是减少影像的畸变,而是设置参与数据解算的范围,利用蒙板的技术,将影像分为两部分,即参与空三解算的区域和不参与空三解算的区域。蒙板是通过两种颜色来表示的,即黑色和白色。对于参与数据解算的区域填充为白色,对于不参与数据解算的区域,则填充为黑色。蒙板可以针对某一文件夹内所有的影像,也可以用于单张影响。如果是用于所有影像,则需要将蒙板和影像放在同一文件夹内,且命名必须为mask.tif,然后新建工程,加载影像,蒙板就会起作用,这样蒙板就设置完成了。蒙板设置完成后,在空中三角测量解算时,其对影像边缘部分,不进行提点操作,只是针对白色填充区域进行空三加密,这样有效降低了影像畸变带来的影响,提升了加密点的精度,有助于空中三角测量的解算。
2.3.2 基于匀光匀色软件提升影像的质量
由于无人机像幅小,获取的影像数量多,加上相机镜头质量一般,其获取的影像一般来说亮度不高,色差大,对比度不明显,不利于数据的解算,因此需要对其进行匀光匀色、亮度调整的处理。目前对于影像质量的处理,通常是利用软件实现的。首先利用Photoshop 软件,对某一幅具有代表性的影像进行参数调整。主要调整亮度、对比度两项参数。调整完成后,将该过程进行记录,然后利用批处理的方式对其进行处理,得到亮度、对比度符合要求的影像。对于影像的色差,则采用匀光匀色软件进行。利用航天远景的易拼图(EPT)软件,完成影像的匀光匀色处理。首先选择一幅参考影像,参考影像的选择要具备代表性、地物类型丰富。然后将待处理的影像加载到软件中,设置参考影像和匀光方法,选择输出格式,完成影像的匀光匀色,具体设置如图3 所示。
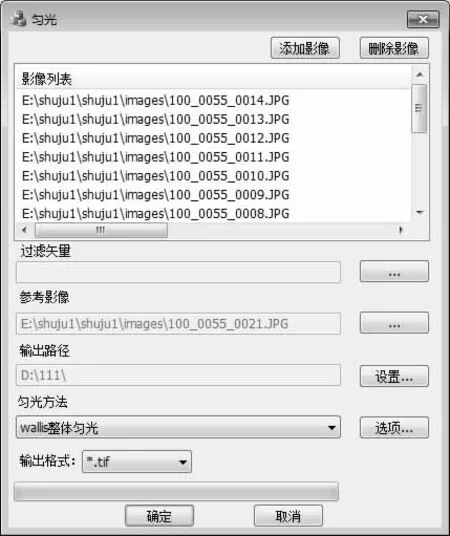
图3 匀光匀色参数设置
2.4 软件组合使用
目前倾斜摄影测量解算软件较多,如PhotoScan(下文简称PS)、ContextCapture(下文简称CC)、中测智绘的Mirauge3D(下文简称M3D)、大疆的大疆智图(DJI Terra)、航天远景的Virtuoso3D、上海瞰景的Smart3D 等,各软件均有优劣势,组合使用,可以发挥软件的各自优势,对数据解算来说,成功率和效率均会有明显提升。软件的组合使用属于优化后,优化前是指仅使用CC 软件进行数据解算,优化后的所耗时长是两款软件共用时长。
2.4.1 PS 与CC 软件组合使用
在实际作业中,将PS 软件和CC 软件组合使用,可以有效提升空三的解算成功率。PS 软件具备海量数据解算的能力,但是其用于实景三维模型生产的话,没有任何优势,劣势较多,因此一般只用来进行空三加密的解算。对于CC 软件解算不过的数据,使用PS 基本上都可以快速完成,并且其精度良好。在作业过程中,首先用PS对数据进行解算,然后将其解算得到的空三成果,输出为通用格式XML,然后将其导入到CC 软件中,利用CC软件进行平差调整,然后进行后续的生产作业。该组合可以提升空三的解算效率和精度,对于数据处理人员来说,该方法很实用。
2.4.2 M3D 与CC 软件组合使用
M3D 对于倾斜摄影测量来说,其主要的作用就是快速获取比较准确的影像外方位元素。M3D 软件精度一般,但是其数据解算成功率高,不易失败,因此常被用来进行对POS 数据进行优化处理。首先利用该软件,得到精度较低、带有外方位元素的影像POS 数据,然后将其导出通用的XML 格式,然后导入CC 软件中。该软件较PS 来说,其加密点可以根据需求进行抽稀,因此数据量再大,也可以进行抽稀输出,确保在导入CC 软件时,不会因内存溢出而导致建模失败。
3 统计分析
为了确保本文提出的方案具有通用性,以不同类型的项目对提出的多个方案进行验证,并对验证结果进行统计,统计情况见表1。表中空三成果是否可用按照“是”、“否”填写,空三成果精度单位为像素,空三解算时长单位为小时。
通过表1 中的情况统计结果来看,采用本文的方案对数据进行优化,其空三解算成果均可用。从空三成果精度来看,优化后的空三精度普遍要比优化前的高。在空三解算时长方面来说,部分优化后的空三耗时要比优化前的多,但是相比优化前来说,其成果是可用的,表明本文的优化方案是可行的。

表1 不同方案优化前后结果统计表
4 结论
本文针对倾斜摄影空中三角测量解算容易出现分层、弯曲、失败率高的问题,提出一些切实可行的方案。主要从相机参数、POS 数据、影像质量和软件组合使用四个方面进行分析,并给出相应的优化方案。以实际项目为例,对优化前后的结果进行对比分析。通过多组实验验证可以表明:本文提出的优化方案,在一定程度上,可以提升空三的解算效率和成功率,对于倾斜摄影数据解算来说,具有非常实用的借鉴意义。
猜你喜欢
当代水产(2022年6期)2022-06-29 01:12:02
中国生殖健康(2020年8期)2021-01-18 03:05:34
测控技术(2018年10期)2018-11-25 09:35:40
中国生殖健康(2018年3期)2018-11-06 07:20:12
中小企业管理与科技·下旬刊(2017年7期)2017-08-24 02:13:53
海峡姐妹(2015年5期)2015-02-27 15:11:00
旅游纵览(2014年8期)2014-09-10 07:22:44
焦点(2014年3期)2014-03-11 23:03:43
外语学刊(2011年3期)2011-01-22 03:42:31
黑龙江水利科技(2010年5期)2010-06-08 04:37:20
