煤矿用三臂锚杆钻车研发与应用
2022-07-08 01:11杨文斌
机械管理开发 2022年4期
杨文斌
(山西长平煤业有限责任公司, 山西 长治 046000)
引言
根据煤矿有疑必探、有掘必探的要求,探放水作业是当下煤矿安全生产的必要施工工序,传统的探水设备多采用履带式深孔钻车、移动式坑道钻车或者非自移式探水钻机,履带式深孔钻车、移动式坑道钻车不仅增加了巷道设备数量、增加了交替错机风险,而且造价高昂、体积大,配置人员数量多;非自移式探水钻机功率较小,达不到探放水深度要求,且劳动强度高,需要人工搬运,存在较大的安全隐患。煤矿用三臂锚杆钻车充分考虑机组功能的多样化,不仅在机组两侧设有左右锚钻部,还在机组中部设计有探水钻机,不仅增加了施工探测孔的功能,拓宽了设备的功能和适用范围,而且减少了井下设备种类,优化了煤矿井下巷道设备配置[1]。
1 煤矿用三臂锚杆钻车的组成及工作原理
煤矿用三臂锚杆钻车属于煤矿井下支护设备,主要由行走部、机体部、升降部、锚钻部、钻孔推进器、前部支撑、探水钻机、电气系统、液压系统等构成,如图1 所示。巷道掘进时,煤矿用三臂锚杆钻车与掘进机交替进行探测、掘进、锚护作业,大幅提升了掘进支护效率[2-3]。

图1 整机结构
2 主要技术参数
工作范围(宽×高)为5700 mm×4500 mm;总装机功率为55 kW;行走方式为履带式;行走速度为14 m/min;爬坡能力为±16°;钻臂数量为3 台;钻进锚杆、锚索孔直径分别为22 mm、42 mm;钻进锚杆、锚索孔深度为20 m;钻进锚杆、锚索孔用钻杆规格分别为B19、B22;推进器推进行程为1660 mm;推进器推进速度为5 m/min。
3 关键技术研究
三臂锚杆钻车适用于掘进巷道,可实现探水作业、钻孔、锚杆及锚索施工等功能,机组机身为窄型设计,方便与掘进机掘锚交替作业。机组共配套3 台钻机,机组中部钻机与前部支撑支护外套筒配合使用,可施工巷道迎头工作面不同位置探水孔,机身左右两侧各布置1 台钻机及钻臂机构,可施工巷道全方位顶板、侧帮锚杆及锚索孔;整机采用整体升降式工作平台,前部支撑、中部钻机、钻臂机构均设置在工作平台上方,可跟随工作平台上下升降,满足不同高度范围施工要求,同时机组设有可升降的前部支撑结构,起到临时支护的作用,有效保证作业人员安全。整机使用大功率电机为机组的液压系统、机组照明、瓦斯监测等提供动力;液压系统采用知名品牌的负载敏感柱塞泵,质量可靠,性能稳定[4-5]。
3.1 前部支撑
前部支撑位置设在整体式升降平台前部中间位置,主要由支护外套筒、支护伸缩油缸、支护内套筒、支护顶梁、支护支撑油缸等组成,支护外套筒在支护支撑油缸的作用下既可以向上撑紧巷道顶板,也可以向前撑紧巷道迎头工作面,前后角度变化范围为90°,使巷道顶板支护与工作面迎头探水作业切换方便。当进行顶板支护时,操纵手柄调整前部支撑动作,使其移至合适的位置撑紧巷道顶板,并将支护顶梁的内套筒向左右伸展出来,满足大支护面积的使用要求。前部支撑的主要作用是保护操作者的安全,起到临时支护的目的。基于此,机组进行锚杆、锚索作业时一定要将前部支撑机构升起,支护顶梁展开,防止顶板塌陷。前部支撑结构如图2 所示。
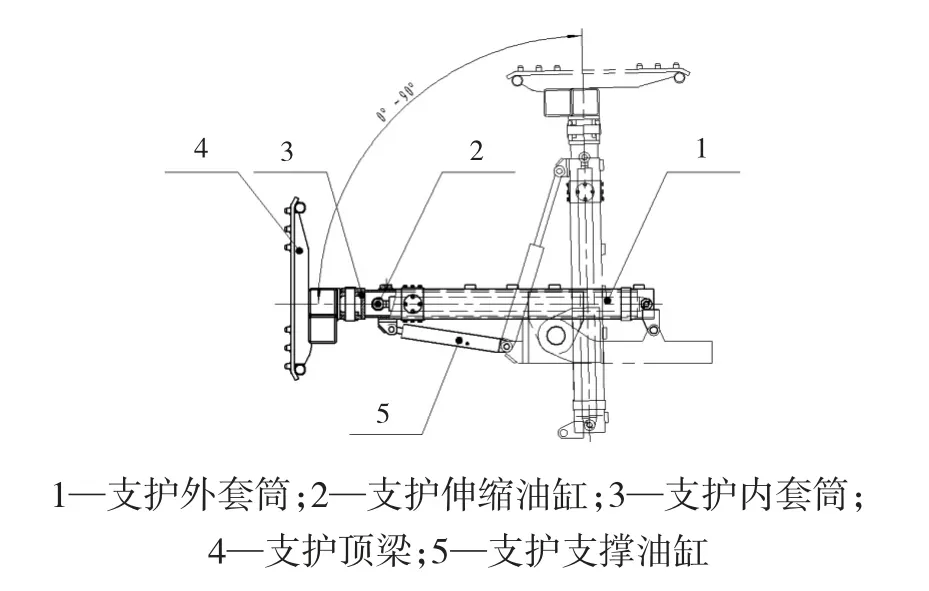
图2 前部支撑结构
3.2 探水钻机
探水作业是当下煤矿安全生产的必要施工工序,本机组将探水钻机设于前部支撑中间位置,当进行迎头探水作业时,操纵前部支撑操作阀手柄使前部支撑及探水钻机处于水平位置,并将支护内套筒向前伸出,支护顶梁左右展开,防止迎头塌陷,保护作业人员安全。该探水钻机可实现岩巷、煤巷、半煤岩巷锚杆支护施工中的探水作业,探水动力头内的大扭矩液压马达利用压力油作为动力源,有效地解决了工作时所需的扭矩与转速,可根据实际情况调节推进速度和马达转速,以保证钻孔效率;推进油缸采用二级伸缩推进,可以实现较大的工作行程;夹持器具有夹紧与松开钻杆的功能,快速实现紧固和拆卸钻杆的目的,方便钻杆的拆装与支扶定位;滑动座的圆形滑轨面与滑道的精加工圆钢面配合,加工成型简单,保证了钻孔作业滑动平稳,不卡顿。探水钻机结构如图3 所示。
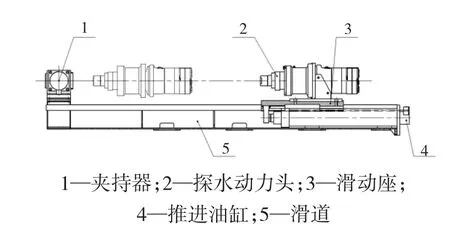
图3 探水钻机结构
3.3 左右钻臂
机组左右钻臂共两台,呈对称分布,可施工顶板锚杆孔,也可施工角锚杆孔、侧帮锚杆孔等,两台钻臂配合作业、互为补充、互不干涉,大幅提升了锚护作业效能。左右钻臂采用悬臂式结构,左右对称布置安装在升降平台上,主要由钻孔推进器、摆动油缸Ⅰ、摆动油缸Ⅱ、调整机构、伸缩总成、支撑油缸、回转座、固定座等组成,钻臂与钻孔推进器连接,通过两者共同配合,完成钻孔及紧固锚杆锚索动作,实现的动作主要有钻臂上下升降、臂身向外回转、钻臂伸缩总成前后伸缩、推进器左右旋转、推进器前后旋转等。钻臂结构示意图如图4 所示。
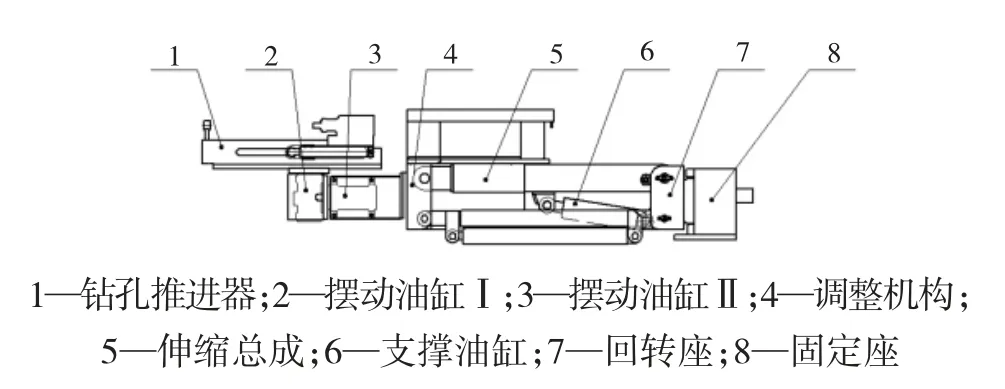
图4 钻臂结构
3.4 升降平台
机组机体部上方设有整体式升降平台,主要由后升降油缸、升降平台、四连杆机构、前稳定机构、前升降油缸、摆动油缸、翻板等组成,前后二级升降油缸伸缩,配合四连杆机构和前稳定机构动作,升降平台可实现高度方向0~1 m 行程范围的平稳升降,能较好地满足操作人员不同高度范围支护作业的要求;同时升降平台两侧翻板在摆动油缸的作用下可左右展开,宽度可达3.1 m,翻板上表面采用防滑结构设计,保证了人员的站位安全及站位面积需求。升降平台结构如图5 所示。
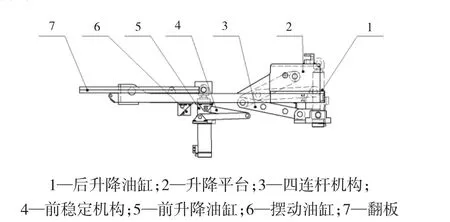
图5 升降平台结构
3.5 电气系统
机组电气系统主要由真空电磁起动器、三相异步电动机、LED 照明灯、急停按钮、隔爆电铃、甲烷断电仪及各电缆组成,电气系统通过真空电磁起动器控制油泵电机的起停,整机具有安全可靠回路保护功能。
3.6 液压系统
机组液压系统是由泵站、油箱、操纵台、液压油缸、摆动马达、阀组及相互联接的管路组成。整机的泵站是由一台55 kW 三相异步电动机,驱动一台负载敏感柱塞泵,经比例换向阀,将压力油分别推送给各执行机构,来完成各部件的动作。液压系统主要实现以下功能:
1)驱动行走马达运转,带动机组实现行走;
2)实现钻臂部的升降、伸缩及钻孔推进器的各种动作;
3)实现升降平台、前部支撑的升降;
4)实现探水钻机各种动作,提供施工钻孔时所需的动力。
4 煤矿用三臂锚杆钻车特性介绍
煤矿用三臂锚杆钻车适用于掘进工作面探、钻、锚施工作业,解决传统探放水设备种类多、配置人员多、施工效率低、作业不安全的现实难题。机组中部机载式大扭矩探水装置可实现巷道迎头断面探放水孔机械化施工,解决探放水效率低和错机辅助时间长的问题;左右钻臂相互独立,互不影响,可互相协调配合、平行作业,提升锚钻效能,节省大量辅助时间。前部支撑主要作用是机械托网及保护作业人员在空顶下的安全,起到临时支护的作用。
该机具有如下显著优点:大扭矩探水钻机可进行迎头探水孔、炮眼孔、瓦斯孔等施工作业,探水施工与锚杆孔施工相互独立,互不影响,最大钻孔深度可达120 m;机组左右钻臂可平行作业,满足巷道全断面锚杆、锚索施工工艺要求,可大大缩短支护时间,提升支护效率;机组采用可伸缩机载式前部支撑,支护效果更好,可改善工人作业环境的安全性;机组采用整体式升降平台,配合四连杆与前稳定机构动作,升降平稳,方便作业人员根据不同的巷道高度对平台进行调整,适应面广;平台左右两侧分别配套可展开的翻板,有效增加作业人员站位面积。
5 实际应用效果分析
本煤矿用三臂锚杆钻车与掘进机配合作业,工作时,首先煤矿用三臂锚杆钻车进行掘前探测孔施工,探测孔施工完毕后进行掘、锚交替循环作业,掘、锚循环交替作业具体流程如下:掘进机行至工作面割煤,切割成巷,割煤一定距离后,掘进机后退至锚杆钻车后方靠帮停机,紧接着,煤矿用三臂锚杆钻车移至工作面对巷道顶帮进行全断面锚杆、锚索支护,支护完毕后,钻车退至掘进机后方靠帮,如此循环作业,完成巷道快速掘进;煤矿用三臂锚杆钻车自2021 年11 月开始进行井下工业性试验,巷道宽度为5.6 m、高度为4.5 m,顶锚杆每排6 根,排距1 m,帮锚杆左右各4 根,锚杆长度为2.4 m,锚索工艺为2-1-2 布置形式,锚索长度为8.3 m,每班3 人工作支护,单班最高日进尺达到7 m,最高月进尺达到210 m,日均进尺由原来的5 m 提升至7 m(每月按30 d 算),掘进速度大幅提高。同时,对钻车进行了探水功能试验,探水钻机在迎头工作面进行探水孔施工,每次探水打5 个眼,使用钻杆的直径为42 mm、长度为800 mm,钻头直径为65 mm,探水钻孔施工钻进100 根钻杆,共钻进距离80 m,每个探水眼约施工5 h,共用时25 h,可满足掘前探测施工要求。
5 结语
本煤矿用三臂锚杆钻车属于掘进后配套装备,与掘进机配合使用,适用于矿山巷道掘进工作面的支护机械化作业。本钻车钻进功能全面,机组灵活可靠,既可进行探水钻孔作业,也可施工全断面锚杆锚索孔,三个钻机可随升降平台上下升降,满足不同高度范围机械化施工要求,实现了一机多用、多功能集成,减少了设备数量,有效提升了矿井生产的单进水平,降低了操作人员的劳动强度,达到减人增效的目的,为国内煤矿快掘快支系统的研究提供了强有力的技术支持。
猜你喜欢
内燃机与配件(2022年2期)2022-01-17
煤(2021年10期)2021-10-11
建材发展导向(2021年13期)2021-07-28
铁道建筑技术(2021年4期)2021-07-21
科学与财富(2021年35期)2021-05-10
矿产勘查(2020年5期)2020-12-25
煤(2020年7期)2020-07-18
中国新技术新产品(2016年21期)2016-12-08
汽车零部件(2014年5期)2014-11-11
筑路机械与施工机械化(2014年3期)2014-03-01