
基于窗口-区域划分策略的多轴轮式机器人避障控制
2022-07-08 08:07谭玉容贾静雯张平霞朱永强
黑龙江工业学院学报(综合版) 2022年5期
郭 强,谭玉容,贾静雯,张平霞,朱永强
(青岛理工大学 机械与汽车工程学院,山东 青岛 266520)
多轴轮式机器人由两个以上的轴组成,所有车轮都可以独立驱动,它在极端地形上的承载能力非常强。因此,越野操作时最好使用多轴轮式机器人。与传统的两轴四轮机器人相比,多轴机器人非常适合野外救援、灾难搜救和其他非道路情况[1]。然而,由于其体积大、车轮数量多,转向灵活性和控制复杂,尤其是当机器人在狭窄空间中移动时,难以实现自动避障。但迄今为止,大部分避障控制研究集中在两轴机器人方面[2],很少有关于多轴轮式机器人避障控制的研究[3]。
多轴轮式机器人,由于车身较长,转弯半径较大,转弯占用的空间较大,因此相对一般的圆形车体的轮式机器人而言[4],避障控制比较复杂[5-6]。
本文的内容分为以下几部分:首先对避障试验所使用的五轴全轮转向全轮驱动雷达小车进行了结构分析;其次提出了窗口—区域避障控制理论,最后进行了不同障碍物分布的避障试验,实现了多轴轮式机器人在狭窄空间内自主、灵活地移动。
1 机器人结构
轮式机器人结构包括小车整体的机械方案介绍和控制系统硬件的选择。轮式机器人整车尺寸为250×600mm,硬件组成主要有:10个转向轮、转向舵机、激光雷达、车轮驱动电机、电机驱动模块、PCA9685、ESP32S,USART GPU串口屏触摸屏,7.4V3000mAH30C锂电池,如图1所示。

图1 五轴轮式激光雷达小车
如图2所示,轮式机器人的控制核心为ESP32单片机,利用激光雷达获取附近障碍物的信息,通过串口传输给ESP32S单片机,随后通过wifi[7]信号传输给笔记本电脑上的Labview,然后根据避障控制策略,输出小车的避障指令,传递给ESP32,同时控制PCA9685模块通过PWM控制车轮的伺服电机,从而实现对速度的控制,轮式机器人就可以顺利避开障碍物。

图2 硬件电路图
2 窗口—区域避障控制理论
系统采用的障碍物探测模块为360°,全扫描Delta-2B雷达,量程0.2~8m,分辨率约为0.592°,旋转一圈,产生608个对测量角度和距离的雷达数据点,扫描频率4~10Hz,所以每圈雷达数据点的间隔时间约为125~200ms,所以需要控制单元在125ms内根据障碍物的情况,计算出小车下一步的运动方向。
驾驶员在驾驶汽车时,并不需要了解汽车周围全部的信息,而是根据汽车的行驶工况,了解下一步拟行驶区域的障碍物情况。同样道理,小车在行驶时,有很多雷达点的信息对小车下一步的行驶,是没有价值的,例如离小车非常远的雷达点、小车前进时小车后面的雷达点,如图3(a)所示。对这些没有价值的雷达点进行分析,会导致避障计算速度变慢,因此需要进行剔除。基于此,我们根据雷达点对小车行驶的影响,提出了基于窗口—区域划分的避障行驶控制策略,精简雷达点。

(a)区域划分前的全部608个雷达数据点(Lidar Point)(b)区域划分后,剩余的74个雷达点(c)图例图3 区域划分前后的雷达点
2.1 窗口-区域策略
通过将大量的雷达点数据,进行区域划分和剔出,降低计算工作量,提高避障反应速度。我们将小车周围的雷达点,根据对小车影响的大小和紧急程度分为4个区域:绿色、红绿、蓝红、黄蓝,如图3(b)所示。
绿线为车身轮廓线,作为最高等级的避障控制。一旦该区域出现雷达点,则表示发生严重碰撞,小车应该立即停车,然后采取最高等级的避障措施,控制小车立即远离该区域的雷达点。
红线和绿线之间的区域,作为车身与障碍物相撞的紧急缓冲区域,用来采取紧急控制措施,以最快速度,拉大车身与障碍物之间的距离,避免车身与障碍物紧急相撞,称为红色紧急避障控制策略,为第二优先级。
蓝线和红线之间的区域,作为车身与障碍物相撞的一般缓冲区域,用来控制小车车身与障碍物之间的距离,避免车身与障碍物的一般等级的相撞,称为蓝色避障控制策略,为第三优先级。
黄线和蓝线之间的区域,用来决定小车下一步的行驶方向,称为黄线控制策略。黄线区域要足够大,避免小车驶入一些类似“死胡同”的区域。该区域的雷达点对应小车正常转向的控制策略:即根据障碍物的分布情况,来寻找能能够让小车通过的具有足够宽度的缺口,并计算出对应的前后轮转向角度,为最低优先级。
为了加快避障控制的速度,每个区域又进一步划分为0-9个区域,一共10个区域,如图4所示。例如,机器人前进时,只需关注0、1、2、3、7、8、9区域,4、5、6区域的雷达点就可以被筛选掉,从而减轻雷达点的计算量,从而加快避障速度。
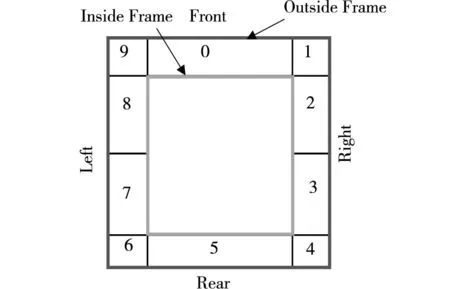
图4 10个分区的分布情况
2.2 黄线避障策略
因为小车其他车轮的转向角度都是根据右前和右后车轮的转角计算出来的。所以在进行避障控制的分析时,只考虑最前面和最后面的车轮就行,这样小车就简化为两轴四轮车模型。
2.2.1 正常转向控制策略下的缺口寻找理论
(1)通过比较缺口宽度与车身宽度的大小,初步筛选可行的缺口。
(2)转向角度迭代,对前后轮的转向角度进行双层迭代,根据缺口的端点与转向中心的距离与小车车身4个车轮的位置关系,确定出合适的前后轮的转向角度。
规定缺口两端点中靠近车身中心线的为内侧端点,远离车身中心线的为外侧端点;
如果缺口宽度满足车身宽度,并且使缺口的内侧端点在全部轨迹线以外,外侧端点在全部轨迹线以内。如图5所示。对前后轮的转向角度进行迭代,确定合适的转向角度,小车从而顺利通过该缺口。
2.2.2 特定情况下的黄线避障策略
由于正常情况下小车的转向角度有限,导致无法通过图5 所对应的障碍物情况。基于此,结合小车的多模式转向优势,根据障碍物的分布情况,在正常黄线避障策略的基础上,提出下列特定避障措施:
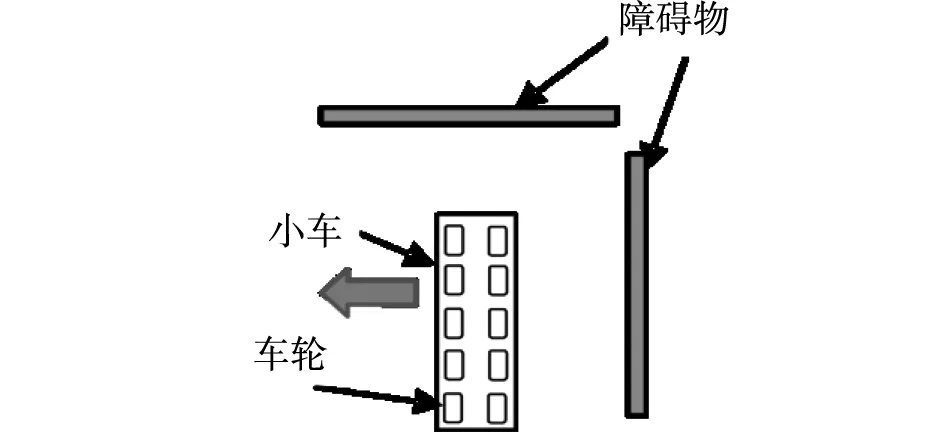
(1)前方有障碍物,左右两侧都有障碍物,如图5(a)所示,小车后退.
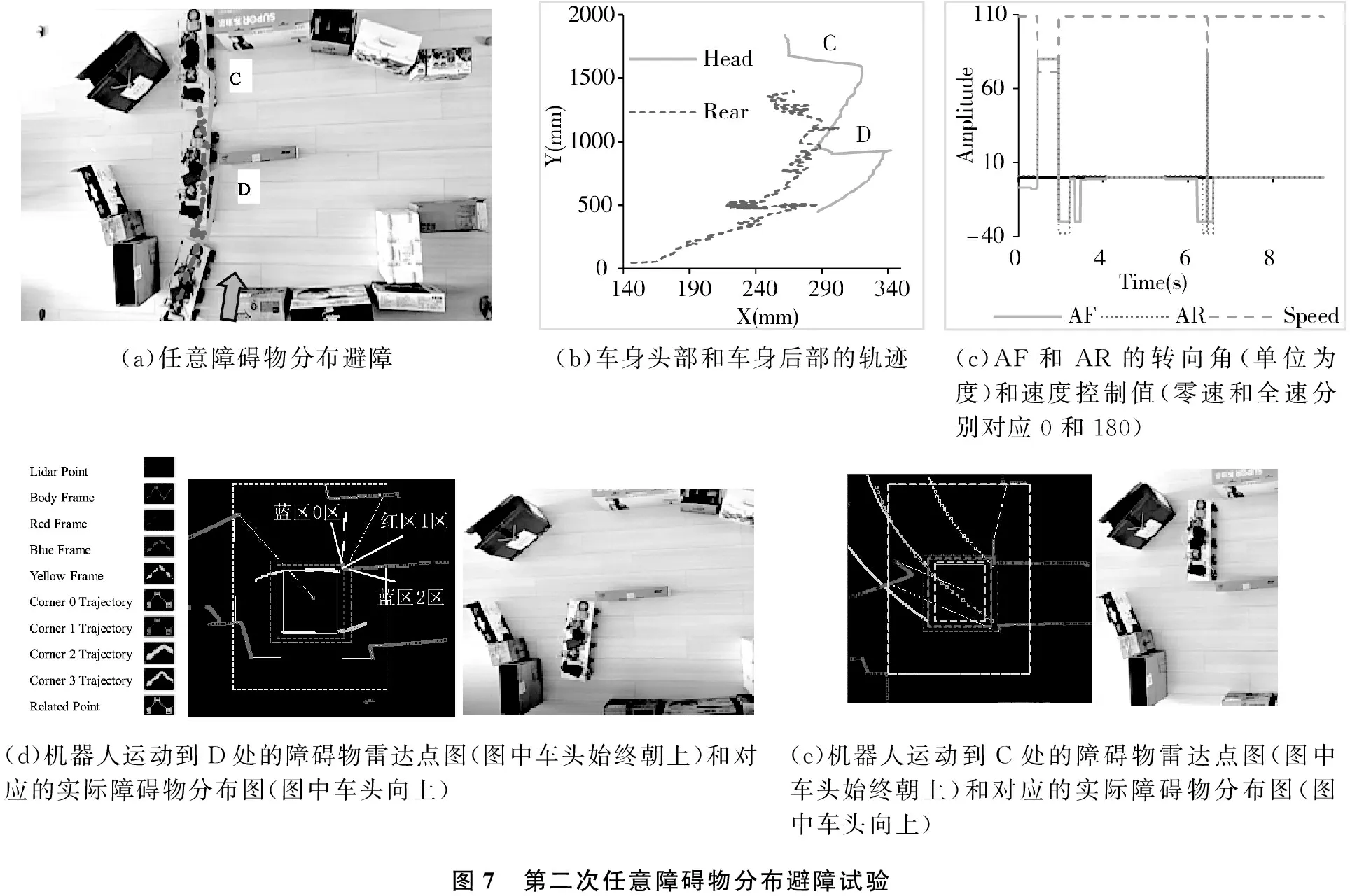
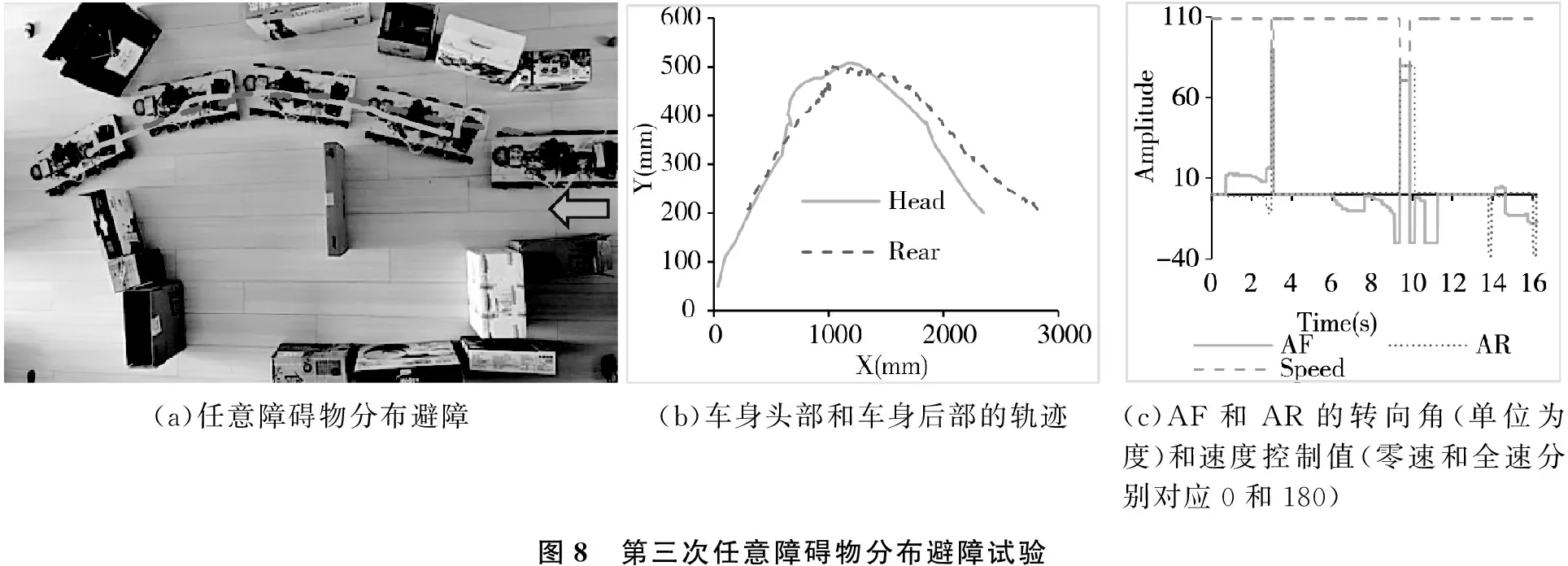
(2)前方有障碍物,左右两侧都没有障碍物。基于最小转向角度控制原则,在前方障碍物左右两侧寻找离小车中心线最近的缺口,作为下一步行驶的方向。如图5(b)所示,为LL (3)前方有障碍物,左侧有障碍物,右侧没有障碍物。小车向右平移,如图5(c)所示。 (4)前方有障碍物,右侧有障碍物,左侧没有障碍物。小车向左平移,如图5(d)所示。 (a)前方、及左右两侧都有障碍,小车后退 (b)前方有障碍物,左右两侧无障碍物 (c)前方有障碍,左侧有障碍,右侧无障碍 (d)前方有障碍,右侧有障碍,左侧无障碍图5 障碍物与小车的位置关系图 为了验证机器人对任意障碍物分布的避障能力,以及控制策略具有较强适应能力或鲁棒性,设计了随机障碍物分布的避障试验,区域尺寸为2920mm×1500mm。所有障碍物的分布间距都小于机器人的车身长度,满足狭窄空间的布局要求。整个自主行驶过程中,机器人的初始设定速度阀值均为108(阀值0、90、180分别对应机器人全速后退、停止、全速前进,行驶速度与阀值之间为线性关系)。针对所有的障碍物分布,机器人都能自主完成避障行驶。在遇到不能避开障碍物的情况下,机器人会自动后退,并尝试寻找新的可通行路径。随机障碍物避障试验共进行了6次,都能成功的在不碰撞障碍物的情况下自主通过。选取其中3个代表性试验进行分析。障碍物通道分布、及实验结果如图6-图8所示。 第一次试验中障碍物分布如图6(a)所示,机器人从图6(a)中右侧进入,由于通道曲线变化急剧,在C处障碍物侵入蓝区1区,具体如图6(d)所示,因此机器人采取前轮控制量AF、AR均为80°,车速Speed阀值为71的向左后侧平移,躲避右前侧障碍物的控制策略,使图6(a)、(b)的轨迹曲线出现侧向平移。前、后轮转向变量AF、AR及车速Speed的控制输出如图6(c)所示。 (a)任意障碍物分布避障(b)车身头部和车身后部的轨迹(c)AF和AR的转向角(单位为度)和速度控制值(零速和全速分别对应0和180)(d)机器人运动到C处的障碍物雷达点图(图中车头始终朝上)和对应的实际障碍物分布图(图中车头向左下)图6 第一次任意障碍物分布避障试验 第二次试验的障碍物分布如图7(a)所示,目的是验证机器人对多个缺口的就近选择策略,机器人从图7(a)中左下方进入,由图7(a)可以看出在有多个缺口的情况下,机器人优先选择转向角度小的缺口,所以机器人基本保持直线行驶状态。在图7(b)的D处轨迹线出现横向波动,表示障碍物侵入蓝区0、2区、红区1区,具体如图7(d)所示,因此,机器人采取前轮控制量AF、AR均为80°,车速Speed阀值为71的向左后侧向平移,躲避右前侧障碍物的控制策略,使图7(a)、(b)的D处轨迹曲线出现侧向平移。又在图7(b)的C处障碍物侵入蓝区1、2区,此时机器人正处于图7(e)位置处。因此,机器人采取前轮控制量AF向左转向30°,后轮控制量AR向左转向38°,车速Speed阀值为109的向左前侧平移的控制策略,来躲避右前侧的障碍物,使图7(a)、(b)的C处轨迹曲线出现侧向平移。前、后轮转向变量AF、AR及车速Speed的控制输出如图7(c)所示。 (a)任意障碍物分布避障(b)车身头部和车身后部的轨迹(c)AF和AR的转向角(单位为度)和速度控制值(零速和全速分别对应0和180)(d)机器人运动到D处的障碍物雷达点图(图中车头始终朝上)和对应的实际障碍物分布图(图中车头向上)(e)机器人运动到C处的障碍物雷达点图(图中车头始终朝上)和对应的实际障碍物分布图(图中车头向上)图7 第二次任意障碍物分布避障试验 第三次试验的障碍物分布如图8(a)所示,目的是验证机器人对多个缺口的就近选择策略,机器人从图8(a)中右侧进入,由图8(a)可以看出在有多个缺口的情况下,机器人优先选择转向角度小的缺口,所以机器人基本保持直线行驶状态。轨迹曲线如图8(a)、(b)所示。前、后轮转向变量AF、AR及车速Speed的控制输出如图8(c)所示。 (a)任意障碍物分布避障(b)车身头部和车身后部的轨迹(c)AF和AR的转向角(单位为度)和速度控制值(零速和全速分别对应0和180)图8 第三次任意障碍物分布避障试验 通过机器人的随机避障分布的避障试验,验证了所设计的避障控制策略能较好地实现在小于车身长度的狭窄空间成功进行多模式自主避障行驶。 针对多轴轮式机器人狭窄区域避障不灵活这一问题,本文设计一款五轴轮式激光雷达小车,并提出了窗口—区域避障控制理论,大幅度减少拟处理的雷达点的数量,在此基础上,提出基于正常转向控制的缺口寻找避障控制策略,提高了避障反应速度,然后进行了不同障碍物分布的避障试验。实验表明窗口—区域避障控制理论可以确保在狭窄空间内更灵活、更快地避障移动。 在后续的研究中将继续优化窗口—区域避障控制理论,优化行驶轨迹,减小避障时的空间占用。在遇到障碍物实现预想轨迹的规划,降低转弯难度。


3 实验验证

结语
猜你喜欢
科学与财富(2021年34期)2021-05-10
支部建设(2020年30期)2020-12-18
动漫界·幼教365(中班)(2020年3期)2020-04-20
创新作文(1-2年级)(2019年4期)2019-10-15
科普童话·百科探秘(2019年5期)2019-08-27
好孩子画报(2019年10期)2019-01-10
现代兵器(2017年1期)2017-02-13
读者·校园版(2013年18期)2013-05-14
