空间用液晶可变相位延迟器相位延迟测试系统的电子学设计
2022-07-07 01:52黄威林佳本侯俊峰张洋朱晓明邓元勇王东光
液晶与显示 2022年7期
黄威林佳本*侯俊峰张洋朱晓明邓元勇王东光
空间用液晶可变相位延迟器相位延迟测试系统的电子学设计
黄威1,2,3,林佳本1,2,3*,侯俊峰1,2,3,张洋1,2,3,朱晓明1,2,3,邓元勇1,2,3,王东光1,2
(1.中国科学院 国家天文台,北京 100101;2.中国科学院 中国科学院太阳活动重点实验室,北京 100101;3.中国科学院大学,北京 100049)
液晶可变相位延迟器(LCVR)由于其调制速度快、重量轻、无运动部件等特点成为空间光学仪器中新的研究热点。然而,LCVR中的液晶属于高分子材料,其空间适应性有待考核验证。由于地面环境模拟试验无法同时还原太空中的所有参数,因此亟需研制一台符合卫星搭载要求的LCVR空间特性试验仪,来研究液晶器件在真实星载环境下的电光性能(相位延迟-电压曲线稳定性)。本文分析了LCVR延迟测试系统的稳定性,并给出LCVR相位延迟-电压曲线的电子学测量方案。首先使用“零点”标定法设计了高稳定度的LCVR驱动;然后使用变频误差控制法,实现了LCVR的高精度恒温控制。其中LCVR驱动稳定度达到99.3%,LCVR恒温精度最高达到(35±0.1) ℃。在此基础上,对整机进行了力、热和电磁兼容试验,结果表明待测LCVR和电子学系统功能稳定,成功完成了LCVR这一首飞器件的空间光电测试系统在我国的首次研制,对液晶的空间化应用有着重要意义。
液晶器件;液晶可变相位延迟器;偏振调制;恒温控制
1 引言
与传统光电成像探测不同,偏振探测不仅能够提供目标场景的光强度、光谱信息,而且可获得偏振度、偏振角、椭圆率等偏振参数,从而增强被测目标场景的信息量,在突显目标、提高目标和背景对比度、反演被测目标物理特性等方面有着独特的优势[1-7],被广泛应用于地物遥感、海面目标探测、生物医学、大气物理、空间探测和天文遥感等诸多领域[8]。
作为偏振设备中的关键电光调制器件,液晶可变相位延迟器(LCVR)由于其无旋转机构、调制速度快、口径大、质量轻、光谱范围宽、驱动电压低、相位延迟0°~360°连续可调等优势,被广泛应用于天文、遥感等领域的偏振探测中[9-13]。尤其在太阳物理领域,LCVR是目前唯一可同时满足太阳偏振测量和窄带调谐滤光的低压电光调制器件。现在国际上大多数地基太阳望远镜均使用了LCVR进行偏振成像成谱测量[14-20]。
相较于地基望远镜的普及化,LCVR在空间望远镜的应用则极为缓慢,其核心问题在于:LCVR中液晶的高分子和液晶态属性,增加了其在空间复杂环境下的应用风险。在国际上,西班牙国家太空科技研究所直到2005年才开始LCVR空间化的预研。2020年欧空局Solar Obiter卫星的发射,标志了LCVR首次实现了空间化应用。在国内,2017年立项的ASO-S太阳观测卫星[21]将LCVR作为全日面矢量磁像仪(FMG)的偏振调制器件,侯俊峰等人虽然在FMG中开展了LCVR的质子辐照、中子辐照、紫外辐照、真空和高低温环境试验[22],但真实太空环境是各种辐照、力热环境的综合体,LCVR在实际空间环境的性能如何尚未可知。然而, LCVR的空间适应性恰恰直接决定了其能否在空间科学仪器中进行有效而稳定的应用,是获得高质量科学数据的关键所在。因此,LCVR在真实太空环境中的性能测试势在必行。
本文介绍了空间LCVR相位延迟测试系统的电子学设计与稳定性测试,该系统将搭载CX-06卫星对LCVR的最关键偏振参数(相位延迟-电压曲线)的重复性、稳定性进行星载测试。本文首先介绍了LCVR相位延迟的测量原理和整机的稳定性分析,然后详细介绍系统的电子学实现方案,最后介绍整机电装集成后进行的各项环境试验和试验结果分析。
2 LCVR的结构与相位测量原理
2.1 LCVR的结构
一片LCVR由核心材料液晶分子、形成液晶分子容纳腔的玻璃基板和玻璃基板内表面附着的氧化铟锡(ITO)导电膜等组成,如图1所示。
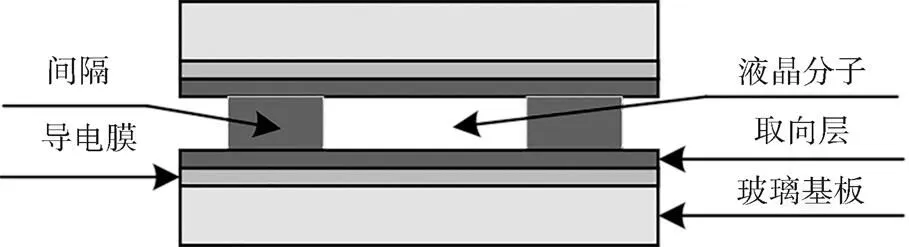
图1 LCVR基本结构
本文的LCVR中液晶材料为向列相液晶分子。向列相液晶分子呈长棒状,长轴的方向决定了LCVR的光轴(快轴)。在ITO导电膜上施加不同电压时,液晶分子从初始时平行于玻璃基板到逐渐垂直,LCVR的相位延迟逐渐减小。本文的LCVR材料为5CB(PP5CN),导电膜为ITO,取向膜为聚酰亚胺材质,液晶盒厚为5 µm。该LCVR的典型电压-延迟曲线如图2所示。
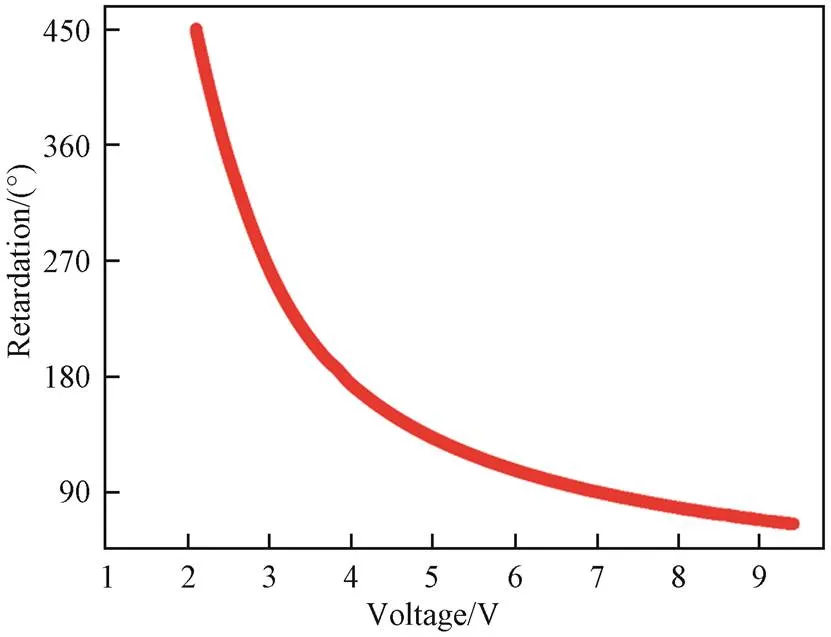
图2 典型的LCVR相位延迟-电压曲线
2.2 相位延迟的测量
由图 2的曲线可知,LCVR的相位延迟随着驱动电压的增加而非线性连续减小。在2~10 V的电压区间,相位延迟连续变化360°以上,该曲线的稳定性直接决定了LCVR能否被真正应用到空间设备中。完整地测量LCVR的相位延迟-电压曲线一般至少需要光源、偏振调制组件和探测器3部分,本文使用光强法测量LCVR的相位延迟-电压曲线,整机的光路示意图如图3所示。

图3 空间LCVR相位延迟测试系统的光学设计
图3中,偏振调制组件主要由两片偏振片和一片LCVR组成。其中,两片偏振片的透光轴相互平行,待测的LCVR光轴与偏振片的光轴成45°夹角。在该光路中,由LED光源产生入射光,经过准直镜、滤光片、偏振调制组件和成像镜后,被探测器接收并进行光电转换。根据偏振光学传输理论,探测器接收的光强out与LCVR的相位延迟之间有如下关系:

其中,in为光源产生的入射光强,对式(1)的进行变换:

当光源的光强in不变时,对LCVR施加不同的驱动电压,探测器会接收到不同的输出光强out,经过完整的驱动电压扫描后,可以获得光强-电压曲线,经过归一化和相位转换后即可获得该LCVR的相位延迟-电压曲线。
3 整机的稳定性分析
整机的稳定性直接决定了所采集的LCVR相位延迟-电压曲线的真实性,因此在设计时需要提高光机和电路系统的稳定性。整机的稳定性主要受光源[23]、探测器和LCVR工作条件的影响,其中偏振片、滤光片和其他光机部分的稳定性高,随外界的变化在本文中可以忽略。光源和探测器是半导体器件,自身的电光/光电稳定性较高,如光源短周期的变化率一般在0.5%以内[23]。规范的电路设计和数据校准可以提高光源和探测器的稳定性和数据可靠性,对整机稳定性的影响可以忽略。LCVR的工作条件包括:为LCVR提供稳定的驱动电压和为LCVR提供稳定的恒温环境,二者的变化是影响整机稳定性的主要因素。
3.1 LCVR驱动的稳定性
LCVR是电光器件,驱动电压的稳定度会直接影响LCVR的实际响应。根据液晶的直流效应和电场效应,LCVR的驱动信号一般为交流方波,典型的LCVR驱动信号如图4所示,信号的实际输出频率为out,峰峰值为1-2。

图4 LCVR的驱动波形
图4中,正电压1和负电压2理论上应该与设定值set相等,由于电子电路的非线性误差,三者不完全相等,导致施加在LCVR的实际电压不等于预设值,使得LCVR产生相位漂移。定义LCVR驱动系统的幅值稳定度为out,计算公式如式(3)所示:

除了电压幅值需要稳定外,液晶分子的电导率会随着驱动信号的频率out变化,导致相同驱动电压幅值下,不同的out也会使得LCVR产生相位漂移。由于外部电磁干扰等因素,实际信号的频率out与设定频率set之间会存在误差,定义LCVR驱动系统的频率稳定度为freq,计算公式如式(4)所示:

那么,LCVR驱动系统的整体稳定度driver为:

3.2 LCVR的温度稳定性
液晶具有温变特性。在液晶态下,液晶分子之间的粘性等参数会随着工作环境温度发生变化,导致LCVR产生相位漂移。在相同的驱动电压和频率下,LCVR的工作温度每变化1 ℃,LCVR的相位延迟变化约为1°[20]。因此,需要使LCVR工作于稳定的温度下。根据FMG载荷中LCVR的恒温要求,将(35±1) ℃作为本文中LCVR的恒温指标。
4 电子学系统的设计
4.1 整机的工作流程
整机的星上工作流程为:设备由卫星进行加电后,首先初始化数据采集和任务调度系统,然后开启LCVR的自动恒温和驱动电压预输出,最后开启CAN总线等待卫星的遥测指令,完成系统初始化。
初始化完成后,设备等待卫星CAN总线每隔1 s发送1次的遥测指令。在正确接收指令后,将LCVR的驱动电压在0.9~7.1 V的范围内循环递增0.1 V,并将获取的科学数据(光强电压值、环境温度值、LCVR温度值、光源电流值、LCVR驱动电压值)立即返回给卫星,等待接收下一次遥测指令,如此往复。
4.2 整机的电路结构
空间LCVR相位延迟测试系统由光机和电路组成,由于所搭载卫星的设计限制,整机的尺寸最大为18.9 cm×10 cm×7.2 cm,除去最小化设计的光学与机械结构(12.4 cm×4.3 cm×3.9 cm)后,电路系统设计空间十分有限。因此,进行电子学设计时要平衡空间、体积、重量、安装方式、散热、功耗(峰值功率<15 W,平均功率<5 W)的限制。
电路系统功能有驱动LED光源和LCVR,采集环境温度、LCVR温度和光电探测器的输出电压,以及实现电源转换、数据处理和星上通信,电路框架如图5所示。

图5 电路功能框图
该电路方案中,使用的电子元器件均为航天等级的陶瓷封装或者金属封装,导致元器件的体积与质量都较大,因此需要采用高集成度的主控制器来提高空间利用率。主控制器选用西安微电子技术研究所的嵌入式星载管理单元——LSEMU01,该芯片外包络尺寸为4.6 cm×4.6 cm×1.06 cm,芯片核心为增强型8051内核,集成的2路CAN2.0B总线收发器和驱动器用于星载通信,集成多路12位模数转换器(ADC)用于探测器数据采集和温度采集等,集成的11位数模转换器(DAC)和定时器用于产生LCVR的驱动信号。根据电路功能确定电路方案和主控芯片选型后,接下来根据整机稳定性分析结果,对LCVR驱动和恒温控制进行详细设计。
4.3 LCVR驱动系统
在上文的系统稳定性分析中,LCVR驱动的稳定性是整机稳定性的关键变量,根据式(5),电压驱动系统的稳定度包括幅值稳定度out和频率稳定度freq。由于LSEMU01集成的DAC极性和输出范围都需要二次调制,电压驱动系统首先产生幅值可调的双极性直流信号,然后将其调制为固定频率的交流方波,实现LCVR的驱动。
431双极性可调直流电压的产生
为了产生幅值可调的双极性直流电压信号,首先使用LSMEU01集成的DAC输出单极性信号,再经过精密运算放大电路转换为双极性可调直流电压信号。DAC的原始电压输出范围DAout为0~2.5 V,经由LSMEU01内部集成的一级放大电路(放大倍数为1),放大为0~5 V的可调信号后,从LSMEU01管脚输出。然后使用图6的外置二级放大电路实现极性转换和信号放大(输出范围达到-10~10 V)。

图6 驱动信号极性转换放大电路
在放大电路中,使用低温漂(0.1%精度)的金属薄膜电阻作为反馈电阻,提高了正负电压的对称精度,同时使用单运放的电路方案也减小了电路板面积。如图6所示,LSMEU01的DAC输出管脚连接到DA_OUT端口,驱动信号从J9端口输出到LCVR。LCVR驱动系统的理论输出精度为:

其中芯片内部的一级放大倍数1=2,外置二级放大电路的放大倍数2=4,LSB为最低有效位。J9端口的输出电压out与DAC的输入数据码(范围:0~2 047)关系为:

432高精度频率调制器的设计
实现符合电压范围的双极性直流信号后,需要使用高精度的频率调制器,将该直流信号按照固定频率(LCVR一般为2 kHz)调制为交流方波。LSMEU01控制器集成的16位硬件定时器可以产生固定时间间隔的定时器中断,在该中断中依次设置DAC输出幅值相等、极性相反的电压,即可产生所需频率的双极性方波。比如,当输出频率为2 kHz、幅值为5 V(代表峰峰值为10 V)的LCVR驱动信号时,设置定时器每间隔250 µs进入一次定时器中断,在该中断程序中依次设置DAC输出+5 V和-5 V,实现交流方波调制。
在LSEMU01中共有14个不同类型的中断信号源(ADC中断、定时器中断、CAN总线收发中断等)。在微控制器的中断管理系统中,高优先级的中断可以打断低优先级的中断,同等优先级的中断按中断发生顺序依次执行。为了保证输出信号频率的准确性,需要将该频率发生的定时器设置为最高优先级以防止被打断。LCVR的驱动信号频率越高,该定时器中断的时间间隔就越小,使其他的中断信号无法实时响应,导致如CAN总线收发错误等系统异常。经过理论计算和长周期测试,将LCVR的驱动信号频率从2 kHz降低到600 Hz后,整机可以稳定工作。
433DAC“零点”校准
LCVR驱动电路中,DAC芯片的输出非线性和放大器及阻容器件的离散性,导致实际输出电压与理论输出电压值之间存在误差,必须对输出电压进行校准。传统的校准方法为:分别向DAC写入两组数据码1、2,使用高精度台式电压表测量最终的输出电压O1、O2,分别代入式(8),计算出和的值。

但是,该校准方法依赖于电压表的测量精度,同时微小的测量误差会使得和的值发生较大变化,导致校准失败。
为了减小测量误差带来的影响和对高精度电压表的依赖,根据LCVR驱动信号的输出特点,本文提出更实用的固定精度“零点”校准法,方法如下:
(1)找出DAC的实际“零点”,精确的“零点”可以减小交流信号中的直流偏置,防止LCVR产生直流电降解。利用理论输出公式和普通精度电压表,先粗略找出DAC输出在0 V附近的数据码,再微调值,记录在0 V正负变化量最小的值,记为输出“零点”:0V。
(2)找出LCVR的驱动电压循环递增0.1 V对应的数据码,利用(1)的方法,找出在0.1 V左右变化最小的值,记为输出调整基数:0.1V。
在循环调整LCVR驱动电压时,只需要在上一次值的基础上加上0.1V的值即可。
理想的0V为1 024,经过“零点”校准后,最终的实际0V为1 094,理论值与实际值存在较大的误差。采用Fluke 17B和Victor 86E两款检验合格的普通精度电压表对校准后的正负直流电压进行测量,结果如表1所示。
表1正向与负向输出测量
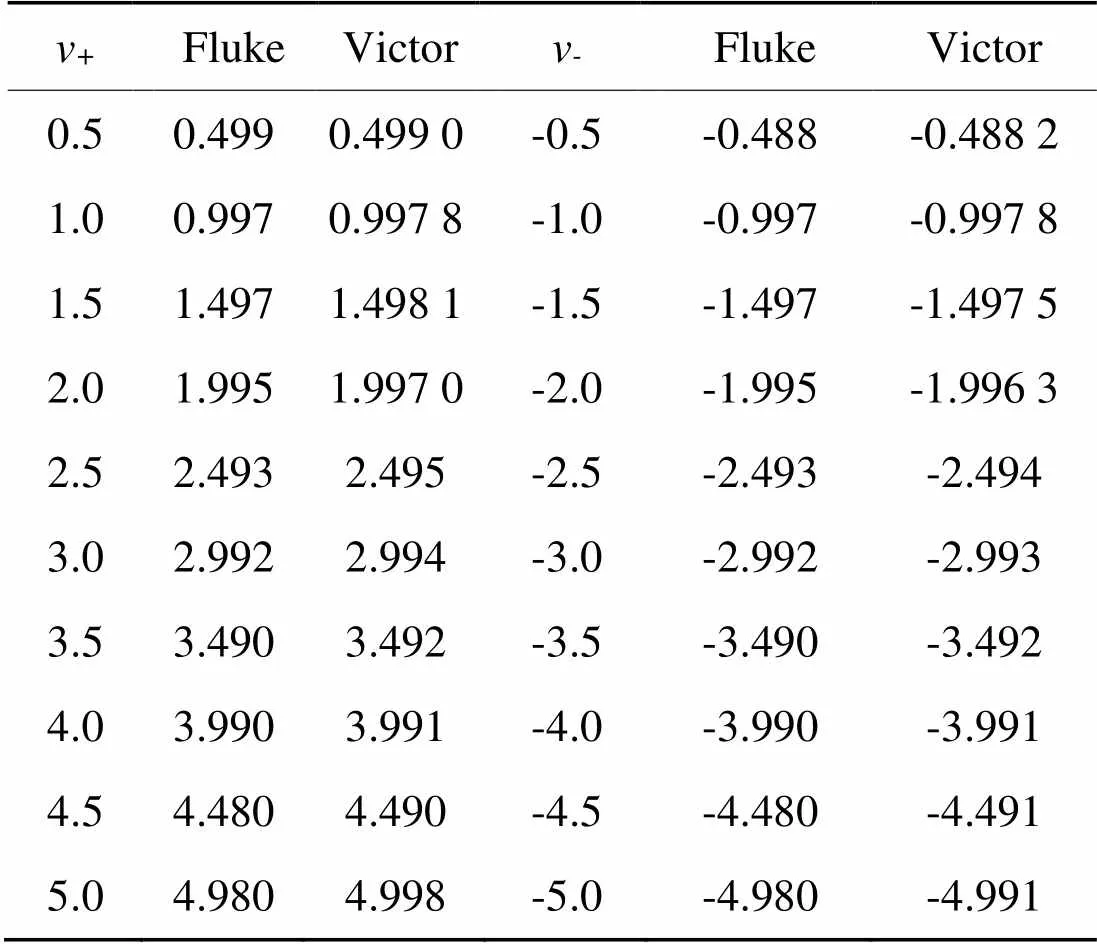
Tab.1 Positive and negative output measurement (V)
根据表1的数据,由公式(3)可以计算出各电压点的正负幅值稳定度out,如表2所示。
表2输出稳定度

Tab.2 Output stability
使用Fluke 17B测试的平均稳定度为0.992 03,使用Victor 86E测试的平均稳定度为0.993 92,两款仪器测试的平均幅值稳定度out为0.992 98。
完成LCVR输出电路校准后,需要测量输出信号的频率稳定度,理论上由最高优先级定时器设计的频率发生器调制的信号频率稳定度应该较高。在实际测试时,使用Rigol-MSO8064示波器每隔60 min记录10组驱动波形的平均频率值,预设的输出频率为600 Hz,8次的测试结果如表3所示。
表3频率稳定度
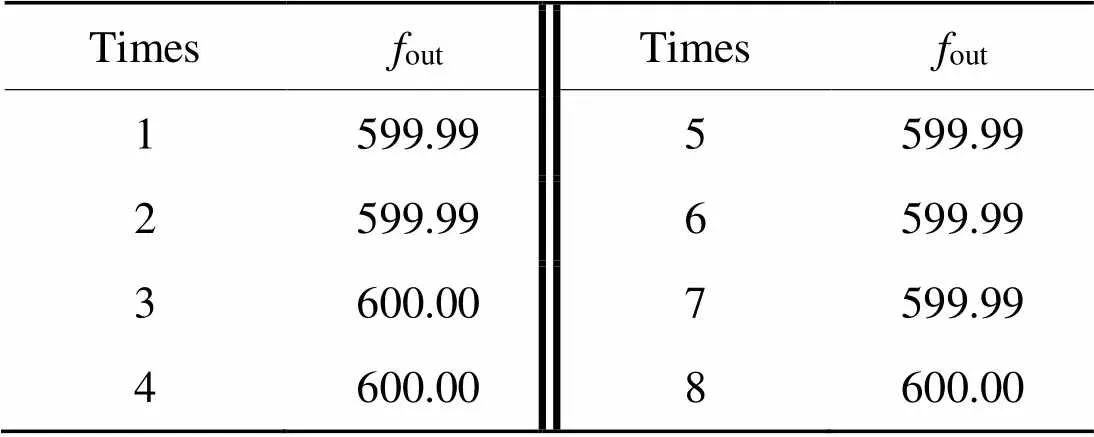
Tab.3 Frequency stability(Hz)
根据公式(4),平均频率稳定度freq为0.999 99。根据式(5),LCVR驱动系统的稳定度driver为0.992 96。
4.4 液晶恒温系统设计
影响整机稳定性的另一个重要因素是LCVR的工作温度。本文中,卫星的舱内温度范围是-10~10 ℃,因此需要为LCVR提供稳定的工作温度环境(温度变化1 ℃以内)。由于卫星舱内温度远低于LCVR的正常工作温度(35 ℃),恒温控制系统通过主动加热和被动散热实现动态恒温。恒温控制系统包括温度采集单元、LCVR加热单元和温差计算单元。温差计算单元由LSMEU01的PWM控制器和定时器构成。温差计算单元获取LCVR的当前温度后,计算出LCVR加热单元当前需要的加热功率,实现LCVR的自动恒温控制。
441温度采集原理
为了提高测温的实时性,需要使用小体积的温度采集单元以尽可能地靠近LCVR。本文选用国营七一五厂的MF-61负温度系数热敏电阻(NTCR),外形尺寸为2.2 mm×5 mm,在-10~40 ℃的互换精度为±0.3 ℃,标称零功率电阻及偏差为3.9 kΩ±1.2%,具有体积小、精度高和重复性好等特点。NTCR随着温度增加,自身电阻减小,理想情况下-函数不变。NTCR的测温原理是通过获取NTCR上的电压,利用欧姆定律计算出该热敏电阻的当前阻值,通过查询电阻-温度表或者-函数获取对应的温度值。MF-61的-函数为:

其中、、、为厂家给出的校准常数,本文使用的MF61出厂校准参数为:=-4.362 16、=4 081.701 94、=-940 33.78和=273.15。
442MF61的自发热分析
在实际环境中,热敏电阻的功率会随着不同的环境温度而变化。热敏电阻在不同的环境温度下其电阻值不同,因此流过热敏电阻的电流也不同,自发热产生的温度也不同。热敏电阻的自发热温度会叠加到环境温度中,产生测量误差。MF61的热耗散常数为0.4 mW/℃,耗散常数的定义为:

式中,为MF61的实际功率,sense为MF61采集的温度,env为当前环境实际温度,MF61在当前功率下的自发热温度为:Δ=sense-env。图7中,当环境实际温度为时,Δ自发热为:
在图7中,假设供电电压为5 V,采用的低温漂限流电阻1阻值为3 000 Ω。由-函数可知,R=25 ℃时的零功率电阻约为3 900 Ω,Δ25应该为5.12 ℃。R=0 ℃时的零功率电阻约为2 222 Ω,对应的Δ0=3.49 ℃,在较大待测环境温度差下,MF61自发热会引入较大的误差。根据公式(11),如果减小或者增大1,可以减小Δ引起的误差。为了提高数据采集系统的采集精度和灵敏度,采用图7所示的惠斯通桥式差分测温电路进行测温。

图7 差分测温电路
在图7测温电路中,1和3阻值应尽可能相等,桥臂的输出电压Δ为:

对公式(12)进行变换,R为:

本文为了降低热敏电阻自发热引起的测温误差,电压减小至2.5 V。为了提高恒温系统在LCVR工作温度范围(35 ℃)的测温精度,桥臂电阻1、2、3选择为与=35 ℃时热敏电阻的阻值相近的值。当=35 ℃时,热敏电阻的阻值为2 679.5 Ω,电阻1、2、3应取值为3 kΩ。根据式(11),35 ℃时Δ自发热温度为1.3 ℃,在设置LCVR的目标温度时应加上该温度值进行温度标定。当LCVR处于恒温工作状态下,在=36 ℃时,Δ=1.29 ℃;在=34 ℃时,Δ=1.30 ℃;在(35±1) ℃的恒温状态下,自发热引起的温度误差为0.005 ℃,可以忽略自发热引入的温度差。
443加热单元设计与恒温测试
LCVR的光机结构示意图如图8所示,两片加热膜串联后固定于两侧,在平衡升温速度与系统最大功率的限制后,加热单元的最大功率为10 W。

图8 LCVR光机结构示意图
LCVR光机结构较大,从加热片发热到温度传递至LCVR上会产生一定的时间延迟,比例积分微分误差控制法(PID)和变频驱动法的结合,可以较好地提高该类惰性系统的实时响应。经过测试,较高的PID温控算法调度速度可以提高温控精度,但由于LCVR驱动系统占用了LSMEU01较大的实时计算资源,最终温控算法执行速度为60 Hz,图9(a)、(b)展示了LSMEU01温控算法分别以2 kHz和60 Hz工作时LCVR的恒温精度。当温控算法以2 kHz全速运行(关闭系统其他功能),LCVR的恒温精度达到(35±0.1) ℃;温控算法以60 Hz的速率运行时(整机正常工作),LCVR的恒温精度为(35±0.3) ℃,满足(35±1) ℃的设计要求。

图9 不同温控频率下的恒温控制精度
最终设计完成的电路系统的实物如图10所示,外包络为15.1 cm×6.2 cm×1.5 cm。

图10 电路系统实物图
5 环境试验与结果分析
完成空间LCVR相位延迟测试系统的飞行件设计后,需要按照航天标准进行完整的地面环境试验,检验电路系统在力学冲击、振动、高低温和真空环境下的功能和性能是否正常。
5.1 力学冲击与振动试验
运载火箭在发射过程中,瞬时重力加速度剧增,产生的冲击力从几个重力加速度到十几个重力加速度不等。同时火箭发动机在点火时,会产生短时的低频振动,在火箭上升过程中也会产生随机振动,这些力学冲击对整机的力学设计与结构装调提出了较高的要求。在电路系统中,一些质心较高的器件如磁保持继电器、电压转换器、电源滤波器等高大器件采用在电路板背面的引脚上焊接额外的直连导线的方式防止焊盘受力脱落,导致电路系统失效等情况发生。
为了验证以上措施的有效性,进行了完整的振动试验(正弦振动方向11.9 g,随机振动方向18 g)、应力筛选试验(方向频率范围20~2 000 Hz)和力学冲击试验(方向1 000 g)。在试验过程中设备不上电。将力学试验前后的相位延迟-电压曲线分别减去力学试验后的数据,将差值绘制于图11中。力学试验前后相位差最大约为0.5°,说明力学试验后电路系统各项性能正常。

图 11 力学试验前后相位延迟-电压的差值
5.2 热试验
热试验是为了验证电路系统在极端温度条件下能否正常启动与工作,验证光电系统能否达到稳定的热平衡。首先进行标准大气压的极端高低温冲击筛选试验(试验温度-30~+50 ℃,19个循环周期,温变速率5 ℃/min),验证设备的极端温度承受能力。然后进行标准大气压的温度循环试验(试验温度-25~+25 ℃,13个循环周期,温变速率3 ℃/min),初步验证设备在工况温度下的运行情况。最后进行真空环境的温度循环试验(-25~+25 ℃, 3.5个循环周期,温变速率大于1 ℃/min),进一步验证电路板在模拟星载环境下的热平衡。在所有试验过程中设备上电工作,每隔一定时间进行高低温冷启动,检验设备在高低温下能否正常开关机。经过数据分析,在温度试验各个循环周期内,任一高低温的可重复性达到99.99%,选取高温、低温任意100组数据的归一化光强-电压曲线的平均值绘制于图12。
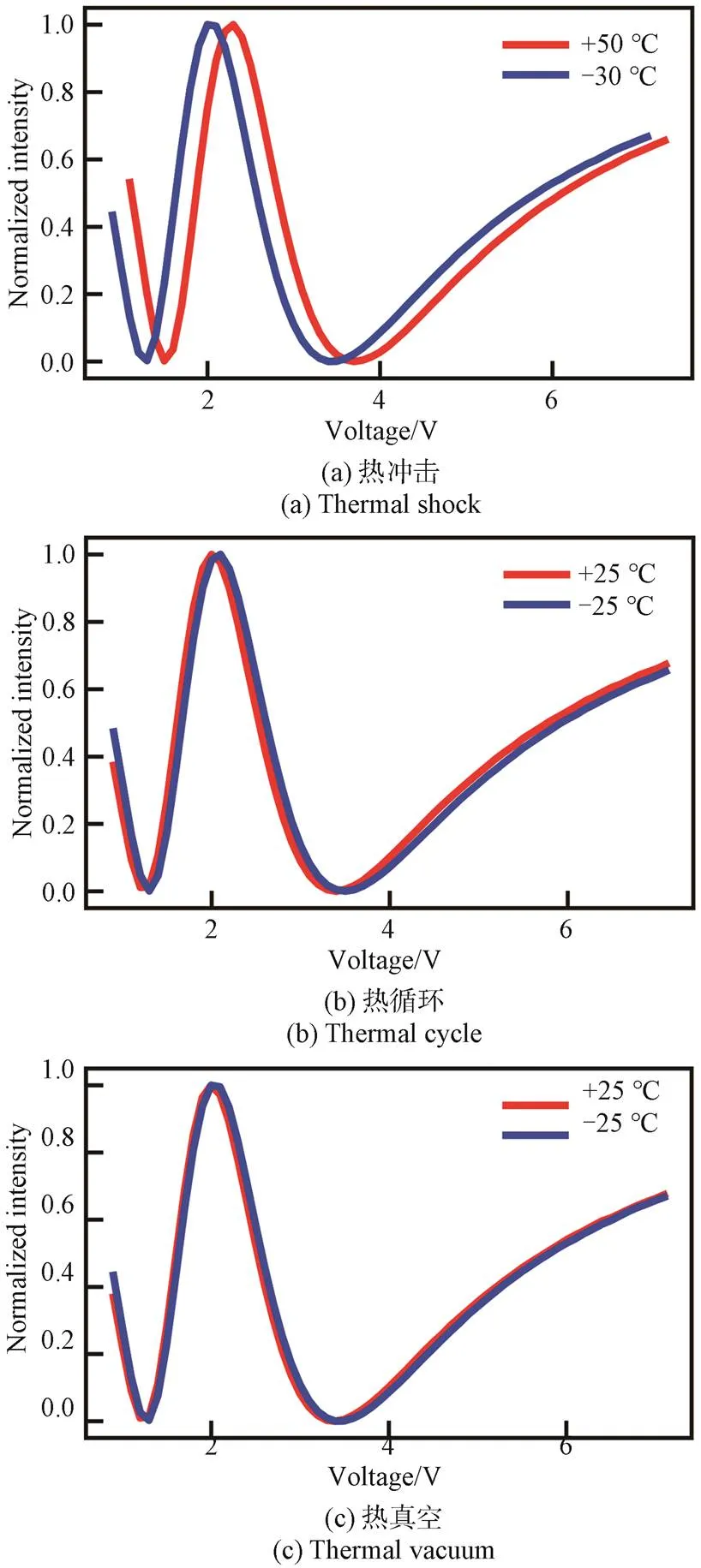
图 12 不同温度试验中的光强-电压曲线变化
图12中,除了图12(a)热冲击高低温的强度曲线有较大偏移,在其他的热试验中高低温的曲线高度重合,说明电路系统高低温开关机正常、电路散热正常,同时整机的工作状态也正常。在对图12(a)的曲线偏移分析中,通过复查环境温度数据,发现当外部环境温度低于-30 ℃时,LCVR恒温系统全功率运行只能加热到32 ℃(低于预设35 ℃)。本文中,空间LCVR相位延迟测试系统位于卫星载荷舱内,最低的环境温度大于-10 ℃,LCVR恒温系统可以正常工作。
5.3 电磁兼容试验
除了热学和力学试验要求外,电路系统还需要较好的电磁兼容能力。电路系统首先需要保证自身产生的电磁信号不会影响卫星和其他载荷的正常工作,也需要具有较好的抗电磁干扰能力,防止其他载荷影响其正常工作。本文的电磁兼容设计主要包括:连接器均采用高等级器件,印制电路板的关键电路采用单点接地,电路的模拟系统和数字系统单独接地等,尽量减小传导与耦合产生的电磁干扰。
在EMC试验中,设备放置于微波暗室,并开机运行。如图13(a)所示,在1~20 GHz频段范围内,设备的各项结果均在红色标准线以下,符合测试要求。如图13(b)所示,在200 MHz~1 GHz频段范围内,部分信号点超过了红色标准线。对各个超标频率点进行采样分析后,发现这些频率点的间隔为16 MHz,推测是LSMEU01使用的16 MHz有源晶振产生的。虽然采取了严格的晶振电路电磁防护措施,但该时钟信号仍可能经过电路板产生传导电磁干扰,或者通过CAN总线的接插件形成天线辐射。这些超标信号在电路设计时可以采用金属屏蔽罩覆盖、合理的电路接地和整机密封等方式减小其信号强度,但是EMC治理是系统性的工程,以上措施也可能带来其他干扰。同时,EMC试验一般在整机设计完成后进行,因此,必须与卫星总体确认这些超标的频率信号不会影响卫星的正常工作。
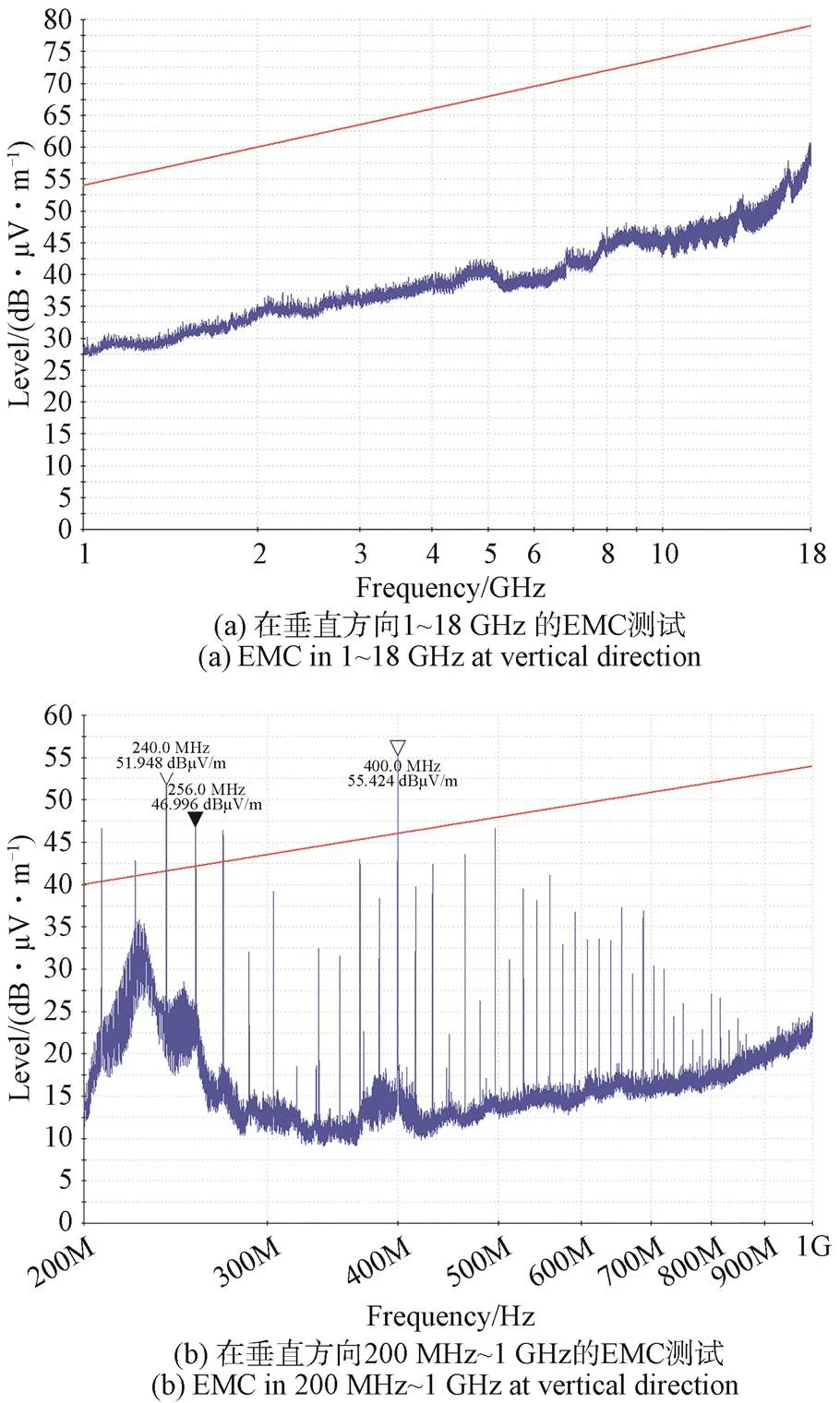
图13 EMC试验
6 结论
本文介绍了LCVR的发展及应用,首次实现了LCVR这一首飞器件的空间化光电性能测试载荷的设计。在受限条件下,实现了光源发生系统、液晶调控系统、高精度液晶恒温系统和低噪声光电探测系统的集成化、微型化设计。本文详细介绍了星载LCVR的相位延迟-电压曲线的测量方法,分析了整机中影响LCVR相位延迟稳定性测量的关键因素,主要包括LCVR驱动信号的幅值和频率的稳定性、LCVR工作温度的稳定性。根据稳定性分析的结果,对电子学系统进行了详细设计,液晶驱动系统的稳定度达到99.3%,液晶恒温控制精度最高达到(35±0.1) ℃。最后对整机进行了力、热和电磁兼容试验,结果符合航天设备试验要求,说明电子学系统功能稳定、性能正常,待测的LCVR电光调制性能良好。目前,整机正在等待卫星的集成测试,预计在2022年发射,预期对液晶器件的空间化应用具有重要意义。
在电路设计中,由于主控制器的实时计算资源有限,液晶驱动信号的频率和恒温控制的精度还有较大的提高空间。同时,下一代的电路系统设计时需提高电磁兼容能力,进一步提高整机的稳定度。
[1] 侯俊峰,邓元勇,王东光,等.液晶调制技术在太阳磁场探测中的应用及展望[J].航天器环境工程,2021,38(3):296-304.
HOU J F, DENG Y Y, WANG D G,. Application and prospect of liquid crystal modulation technology in solar magnetic field detection[J]., 2021, 38(3): 296-304. (in Chinese)
[2] ZHAO X J, BERMAK A, BOUSSAID F,. Liquid-crystal micropolarimeter array for full Stokes polarization imaging in visible spectrum[J]., 2010, 18(17): 17776-17787.
[3] CASTELLANO J A.:[M]. Singapore: World Scientific Publishing, 2005: 12-25.
[4] HOU J F, XU Z, YUAN S,. Instrumental polarization calibration and primary measurements[J]., 2020, 20(4): 045.
[5] HARRINGTON D M, SUEOKA S R. Polarization modeling and predictions for Daniel K. Inouye solar telescope part 1-Telescope and example instrument configurations[J].,,, 2017, 3(1): 018002.
[6] HOU J F, WANG H F, WANG G,. Irradiation study of liquid crystal variable retarder for full-disk magneto-graph payload onboard ASO-S mission[J].B, 2020, 29(7): 074208.
[7] ALVAREZ-HERRERO A, URIBE-PATARROYO N, PAREJO P G,. Imaging polarimeters based on Liquid Crystal Variable Retarders: an emergent technology for space instrumentation[C]//8160,V. San Diego: SPIE, 2011: 81600Y.
[8] 侯俊峰,吴太夏,王东光,等.分时偏振成像系统中光束偏离的补偿方法研究[J].物理学报,2015,64(6):060701.
HOU J F, WU T X, WANG D G,. Study on compensation method of beam deviation in division of time imaging polarimetry[J]., 2015, 64(6): 060701. (in Chinese)
[9] LI F F, XU Y Y, MA Y H. Design of hyper-spectral and full-polarization imager based on AOTF and LCVR[C]//9298,2014:. Beijing: SPIE, 2014: 92980U.
[10] GLADISH J C, DUNCAN D D. LCVR-based polarimetry: calibration issues[C]//7566,Ⅳ. San Francisco: SPIE, 2010: 756609.
[11] CAO Z L, PENG Z H, XUAN L,. Design and fabrication of 2 kHz nematic liquid crystal variable retarder with reflection mode[J]., 2020, 47(6): 870-881.
[12] ZHANG Y, XUAN J B, ZHAO H,. Integrated spectral phase delay calibration technique for a liquid crystal variable retarder used in wide-bandwidth working channel[J]., 2018, 108: 186-192.
[13] PUST N J, SHAW J A. Dual-field imaging polarimeter using liquid crystal variable retarders[J]., 2006, 45(22): 5470-5478.
[14] MARSCH E, ANTONUCCI E, BOCHSLER P,. Solar orbiter, a high-resolution mission to the sun and inner heliosphere[J]., 2002, 29(12): 2027-2040.
[15] PAREJO P G, ÁLVAREZ-HERRERO A, URIBE-PATARROYO N,. UV radiation effects on liquid crystal variable retarders for aerospace applications[C]242012. Mainz: IEEE, 2012.
[16] CASTI M, FINESCHI S, CAPOBIANCO G,. Metis/Solar Orbiter polarimetric visible light channel calibration[C]111802018. Chania: SPIE, 2019: 111803C.
[17] CAMPOS-JARA A, GARCÍA PAREJO P, ÁLVAREZ-HERRERO A. Optimization of the response time measuring method for liquid crystal variable retarders[J].B, 2019, 37(6): 062930.
[18] 周源,李润泽,于湘华,等.基于液晶空间光调制器的光场调控技术及应用进展[J].光子学报,2021,50(11):1123001.
ZHOU Y, LI R Z, YU X H,. Progress in study and application of optical field modulation technology based on liquid crystal spatial light modulators [J]., 2021, 50(11): 1123001. (in Chinese)
[19] 王刚,侯俊峰,林佳本,等.液晶可变延迟器相位延迟-电压曲线精确快速标定[J].光学精密工程,2020,28(4):827-833.
WANG G, HOU J F, LIN J B,. Accurate and fast calibration of liquid crystal variable retarder phase delay-voltage curve[J]., 2020, 28(4): 827-833(in Chinese).
[20] 张颖,赵慧洁,周鹏威,等.液晶相位可变延迟器的光电特性研究[J].国外电子测量技术,2009,28(3):17-20.
ZHANG Y, ZHAO H J, ZHOU P W,. Photoelectric characteristics of liquid crystal variable retarder[J]., 2009, 28(3): 17-20. (in Chinese)
[21] DENG Y Y, ZHANG H Y, YANG J F,. Design of the Full-disk MagnetoGraph (FMG) onboard the ASO-S[J]., 2019, 19(11): 157.
[22] HOU J F, WANG D G, DENG Y Y,. Interference effect on the liquid-crystal-based Stokes polarimeter[J].B, 2020, 29(12): 124211.
[23] 刘刚艳.基于CCD校准用LED光源热稳定性的研究[D].西安:西安工业大学,2011:62-63.
LIU G Y. Study of thermal stability of LED light source used for CCD calibration[D]. Xi'an: Xi'an Technological University, 2011: 62-63. (in Chinese)
Electronic design of space-based LCVR measurement system
HUANG Wei1,2,3,LIN Jia-ben1,2,3*,HOU Jun-feng1,2,3,ZHANG Yang1,2,3,ZHU Xiao-ming1,2,3,DENG Yuan-yong1,2,3,WANG Dong-guang1,2
(1,,100101,;2,,100101,;3,100049,)
Liquid crystal variable retarder (LCVR) has become a new research area for space-based optical instruments because of its fast modulation speed, light weight and no moving parts. Nevertheless, the molecule in LCVR is a type of liquid crystal polymer, its space adaptability needs to be verified. Because we cannot simulate the space environment absolutely in the ground, it is necessary to develop a LCVR experimental device to study the electro-optic performance of LCVR in space. In this paper, the stability of a LCVR measurement system is analyzed, and an electronic measurement scheme for LCVR’s retardation-voltage curve is designed. Firstly,a zero-calibration method is proposed to improve the stability of the driving voltage for LCVR. Then, the high precision temperature control is realized by using frequency conversion error control method. The driving stability reaches 99.3% and the constant temperature accuracy reaches (35 ± 0.1) °C. Based on this, the mechanical, thermal and electromagnetic compatibility tests are carried out. The experimental results show that the electronic system are stable, and the first space photo-electric measurement system for LCVR is successfully developed in China, which is of great significance to the application of LCVR in space.
liquid crystal device; LCVR; polarization modulation; constant temperature control
V11;O753+.2
A
10.37188/CJLCD.2021-0335
1007-2780(2022)07-0849-12
2021-12-22;
2022-01-25.
国家自然科学基金(No.11427901,No.11773040,No.11403047,No.11427803);中国科学院空间科学战略性先导科技专项(No.XDA15320102,No.XDA15010800)
Supported by National Natural Science Foundation of China(No.11427901,No.11773040,No.11403047,No.11427803); Strategic Pioneer Program on Space Science, Chinese Academy of Sciences(No.XDA15320102,No.XDA15010800)
,E-mail:jiabenlin@bao.ac.cn
黄威(1993—),男,四川成都人,博士研究生,2019年于成都理工大学获得硕士学位,主要从事精密仪器控制与液晶偏振光学仪器方面的研究。E-mail:huangw@nao.cas.cn
林佳本(1976—),男,山东青岛人,博士,正高级工程师,2009年于中国科学院国家天文台获得博士学位,主要从事自动控制、图像处理、数据挖掘方面的研究。E-mail:jiabenlin@bao.ac.cn
猜你喜欢
宇航计测技术(2021年3期)2021-08-17
建材发展导向(2021年13期)2021-07-28
河北农机(2020年10期)2020-12-14
河北省科学院学报(2020年4期)2020-03-19
电子制作(2019年19期)2019-11-23
电子制作(2017年13期)2017-12-15
大陆桥视野·下(2017年11期)2017-10-31
电子制作(2017年24期)2017-02-02
电子产品世界(2016年1期)2016-03-07
科技创新导报(2014年11期)2014-11-05