无人机测绘技术在地形测量方面的应用分析
2022-07-07 09:14姜斌
工程与建设 2022年3期
姜 斌
(山东港通智汇信息技术有限公司,山东 烟台 264000)
0 引 言
无人机测绘技术是传统航空摄影测量手段的有力补充,具有高灵活性、高效快速、高精准度、作业成本低、适用范围广等特点[1]。现阶段,无人机测绘技术在地形测量领域中得到充分应用,并发挥出巨大的应用价值。据此,以某地区为测绘试验区,以无人机航测前期准备、无人机成图流程、无人机测绘数据处理、数字线划图制作为切入点展开分析,以期为进一步优化无人机测绘技术提供信息参考。
1 无人机航测前期准备
1.1 航测试验区概述
天气、海拔高度等是影响无人机测绘精准性的重要因素,为保证无人机航测质量,选择晴天、无降水的平地区进行无人机航测试验[1]。试验区位于某地区,测量区内地形以房屋、公路、鱼塘为主。图1为平地测区影像图,该区域海拔高度为3.4 m,地势较平缓,属于温带季风气候,年平均气温为12.3 ℃。
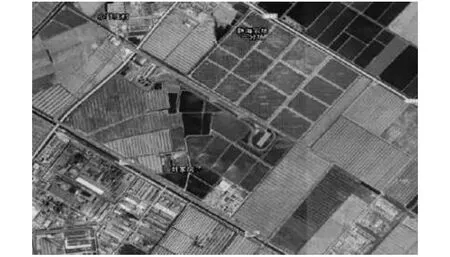
图1 平地测区影像图
1.2 航测系统选择
结合平地测区的区域特点,应用AF1000型固定翼无人机对该区域进行航测。该型无人机的技术指标见表1,其应用了科力达卫星定位布控系统,具有集成度高、稳定性良好、维护成本低、多任务组合等特点,有利于提高航测精准性和实效性[2]。
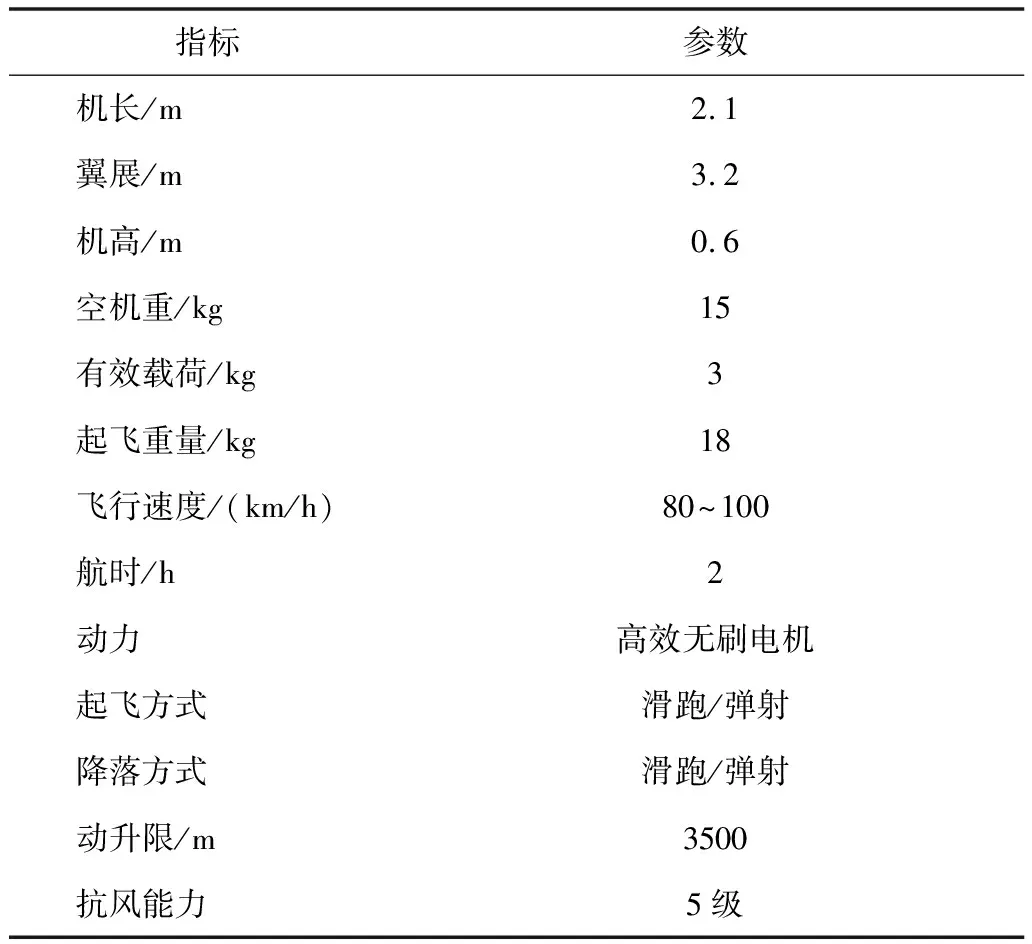
表1 AF1000型固定翼无人机技术指标
航摄仪、航摄时间直接影响航测质量。为了避免影像模糊,本项目采用SONY RX1RM2数字航摄仪,并根据平地测区天气情况分析,选择太阳高度角≥15°、阴影倍数≤3.7的时段进行航测。
1.3 航线设计
根据平地测区地形情况,按照1∶1000成像标准,设置航线。航测图像的分辨率设置为≤0.3m,航向重叠率为70%,飞行高度为236 m,图像拍摄间距为200 m,测区成图面积为2.28 km2[3]。
1.4 像控点布设
像控点的布设直接影响到空中三角测量的精准度,是影响无人机测绘精度的关键因素。像控点布设由非全野外布点、全野外布点组成[4]。为提高航测精度,采用非野外布点法。在布设像控点过程中,应注意以下几点:
(1)应保证影像控制点的目标影像清晰,具有易读、易判断特征;
(2)避免受阴影等因素影响像控点选择过程与选择结果;
(3)应保证像控点及其周围地物呈现灰度反差,提高像控点的可识别性[4];
(4)避免电测干扰;
(5)选择在田地、路边等地点布设像控点,并用喷漆等方式进行标记;
(6)像控点数据应多次采集,并选择均值进行计算分析。
2 无人机成图流程
2.1 外业控制测量方法
非野外布点法包括航带网法与区域网法。
航带网法的布设方案:①五点法,在航带的中央上方或下方布设像控点,数量为1个,同时在航带两端布设1个像控点;②六点法:在航带两段和中间布设像控点,并在相邻的航带上布设控制点;③八点法:在每条航带的两端、中间部分布设2个相控点,并在重叠且相邻的航带上布设4个控制点,通过多重信息比较分析,对航带网进行优化调整[5]。
区域网法的布设方案:一般情况下,在区域网的中间设置1个高程点,并在区域网四周布设平高点,若航测影像重叠度过小,则在影像重叠位置相应增加高程点[5]。
基于测绘区域的实际情况分析,本文选择应用区域网法的布设方案。
2.2 无人机影像预处理
2.2.1 影像畸变校正
无人机测绘系统中搭载的相机为非量测数码相机,航测影像存在畸变误差[6],畸变类型如图2所示。为降低畸变影响,提高影像精度,需要对影像畸变进行校正。影像畸变校正方法包括直接法、间接法两种。直接法是通过畸变影像像点坐标计算分析得出相应坐标,在影像灰度值不发生变化的情况下,对影像进行校正。间接法是集合灰度插值法,对校正后的影像坐标进行反向推算,从而达到图像畸变校正的目的[6]。
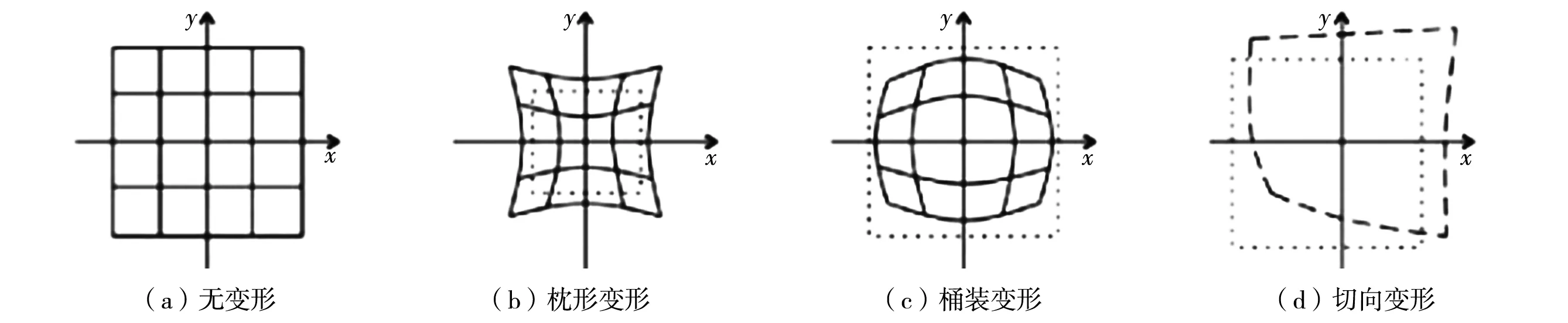
图2 影像畸变类型
2.2.2 灰度影像滤波增强处理
本文采用Wallis滤波变换法对灰度影像进行滤波增强处理,公式表示为:
G(x,y)=[g(x,y)-mg](csf)/(csg+sf/c)+
bmf+(1-b)mg
(1)
式中:G(x,y)为点(x,y)经过滤波变换处理后的灰度值;g(x,y)为初始影像中心(x,y)的灰度值;mg为影像的灰度值均值;sg为灰度方差;mf为影像均值的目标值;sf为影像方差的目标值;c为影像方差的扩展常数;b为影像的亮度系数[7]。
2.2.3 金字塔影像分级匹配策略
为提高像点的精准度、可靠性,应用金字塔影像分级匹配策略对影像进行处理,处理流程为:数字影像→低通滤波→亚采样→低分辨率影像。
通常情况下,金字塔影像分级匹配策略中,金字塔的上一层可以通过相邻的下一层滤波与亚采样处理形成。
2.3 空中三角测量解析
空中三角测量是无人机测绘图像成图的重要步骤。实际应用中,空中三角测量解析可以通过影像提取点与控制点匹配分析,得到被航测区域的外方位元素、加密点坐标等信息,直接影响数字化产品的精度[7]。
2.4 航测信息数字化生产
应用SIFT算法对航测信息的特征点进行匹配分析,并应用数字高程模型(DEM)内插法,建立矩形格网数字高程模型,对影像进行处理,改正像元的投影差,得出数字正射影像数据集。在完成底图绘制后,应用数字线划图(digital line graphic,DLG)对测绘信息进行立体化测量,根据地形图绘制规范绘制出相应比例尺的地形图。
3 无人机测绘数据处理
3.1 空中三角测量信息加密处理
本文选择GXP-AAT自动空中三角测量系统,对空中三角测量信息数据进行加密处理,设定像元的解算结果为像元均方根≤0.5。在加密处理过程中,需要注意的是,应保证加密点及其邻近影像点清晰明显,以提高加密点的易读性和易测量性。
空中三角测量信息加密处理中,应对加密精度要求进行分析。结合本文测绘区域收集情况分析,确定加密精度要求:相对定向精度为连接点上视、下视的误差小于1/3像素。加密点误差计算公式为:
M控=±M公
(2)
式中:M控表示控制点点位误差,m;M公表示公共点点位误差,m。
以上加密处理方式针对外业布设内容,在内业布设方面,需要手动添加加密检查点。
3.2 正射影像处理方法对比分析
Pix4Dmappeer、Inpho是处理正射影像的有效方式,为提高本项目的正射影像处理质量,对两种处理方法进行对比分析。
操作性方面,与Pix4Dmappeer相比,Inpho的操作环节较多,在正射影像处理过程中,应打开各个相关模块,并应在初始阶段设置好各项参数,以实现一键操作,得出处理结果。
空三加密方面,Inpho中应用了德国INPHO公司的空三加密软件,具有自动、高效、自动匹配等优势。但该系统的精度报告详细程度低于Pix4Dmappeer。
数字地面模型(DTM)与文档对象模型(DOM)制作方面,Inpho搭载的模块就有良好的可调性,Pix4Dmappeer的数字地面模型制作形式为单一滤波形式,且文档对象模型的制作形式为单一均色形式。
为保证正射影像处理的精准度,选择Pix4Dmappeer与Inpho相结合的处理方式,对正射影像进行处理。具体处理方式为:将经Pix4Dmappeer处理及畸变处理后的影像、相机参数、精细化后的影像数据信息导入Inpho中进行深度处理。
4 数字线划画图制作
4.1 地形图绘制的精度
数字线划图是对地理要素进行分析、处理、呈现、存储的矢量数据集[8]。在转化数字线划地形图过程中,会出现点位目标偏移误差,需要将偏移误差控制在±0.1mm内;线状偏移误差控制在±0.2mm内[8]。另外,在跟踪和定位地形图,形成数字线划图的过程中,会出现高程点、等高线误差,需要保证误差不会产生地理适应性矛盾。根据相关技术规范要求,确定误差范围,具体见表2、表3。
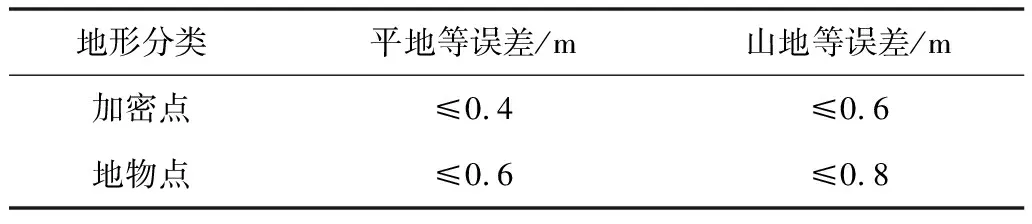
表2 平面位置中误差范围
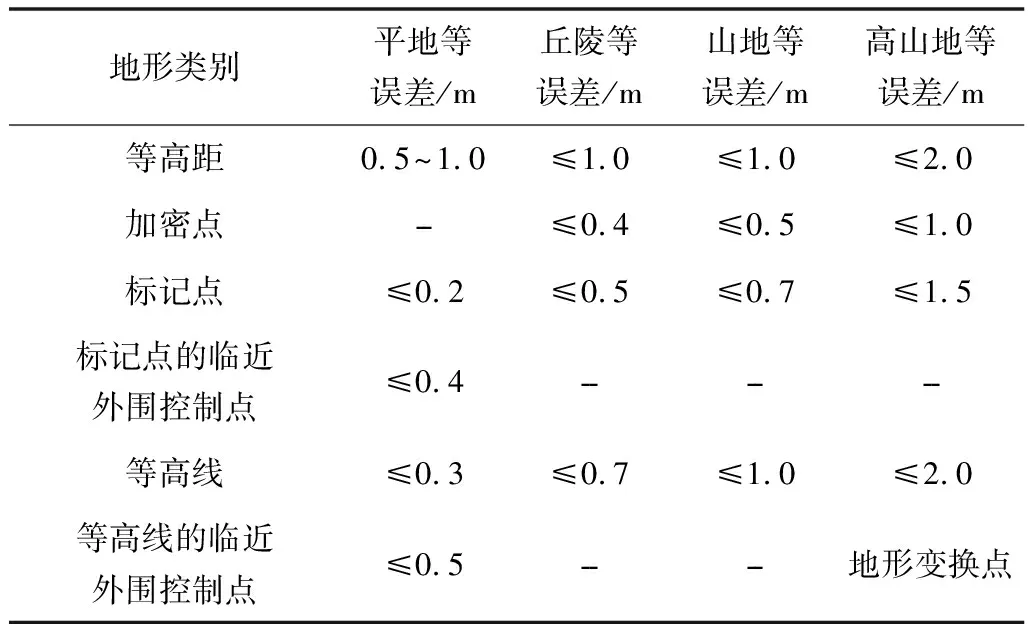
表3 高程中误差范围(比例尺1∶1000)
4.2 生成数字线划图
数据采集过程中,严格按照“模型定位”“看不清不绘”等原则进行数字线划图的绘制;在各项要素采集过程中,应做到不变形、不错漏、不移位[8]。同时,生成数字线划图应统筹考虑成片建筑区内建筑物的数据采集顺序,根据道路、水网等走向情况,对数据进行立体化采集,以在减少成图工作量的基础上,提高成图质量。为了避免人工采集数据造成的误差,本项目应用MapMatrix软件进行核线采样,提高了成图实效。生成的数字线划图如图3所示。
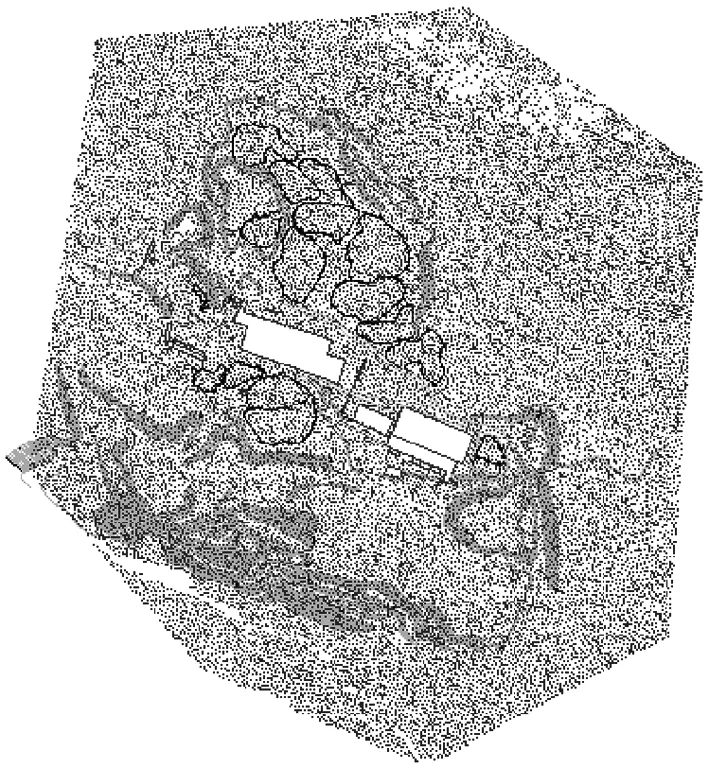
图3 航测区数字线划图
在得到数字线划图后,技术人员可以应用Feature One软件对航测影像进行线性化处理,并根据影像分析房屋等地物元素的具体材质,以根据不同材质进行层码设计,从而满足地形图修补与调整等需求。
5 结束语
无人机测绘技术有效提高了地形图测量的真实性、实效性,对地形图测量发展具有现实意义。本文以某地区为无人机航测对象,根据其平地测区情况分析,确定了航测系统、航线和像控点等。为提高测绘结果精度,应用可视模型对相关数据信息进行处理分析,最终获取试验区数字线划图。
现阶段,我国无人机测绘技术在地形测量方面得到了广泛应用,已经成为测绘领域的先进测量手段之一。但整体而言,我国无人机测绘技术仍存在一定问题,如无人机航测影像的清晰度普遍较低等。除此之外,无人机航测过程中,需要应用可视模型对影像和测量信息进行处理和分析。因此,未来实践发展中,需要相关研究人员进一步完善无人机测绘技术,以推进我国地形测量工程高质量发展。
猜你喜欢
西南交通大学学报(2022年5期)2022-11-03
北京航空航天大学学报(2022年6期)2022-07-02
金属热处理(2022年3期)2022-04-09
湖南理工学院学报(自然科学版)(2022年1期)2022-03-16
天津医科大学学报(2021年1期)2021-01-26
中国信息技术教育(2020年2期)2020-02-02
东南大学学报(自然科学版)(2020年1期)2020-01-16
摄影之友(影像视觉)(2017年10期)2017-11-07
课堂内外(小学版)(2017年5期)2017-06-07
网络空间安全(2016年3期)2016-06-15