
浅析自动驾驶技术发展现状、趋势及挑战
2022-07-06 03:41李川鹏郭宇辰
时代汽车 2022年14期
李川鹏 郭宇辰
中汽数据(天津)有限公司 天津市 300300
1 自动驾驶技术
自动驾驶在汽车行业并不是很晚出现,一开始在欧美和日本,近几年得到了快速的发展,这里面也离不开全球各个国家的立法推动。希望通过智能网联技术的应用能够减缓或者降低事故的发生概率以及事故的影响。比如国家推动相关法规的推动,比如说车道偏离,碰撞预警,驾驶员状态监测,AEB 车道保持,通过防止车道偏离和碰撞减少事故发生概率,这也来源于机器的反应速度要比人的反应速度更快。
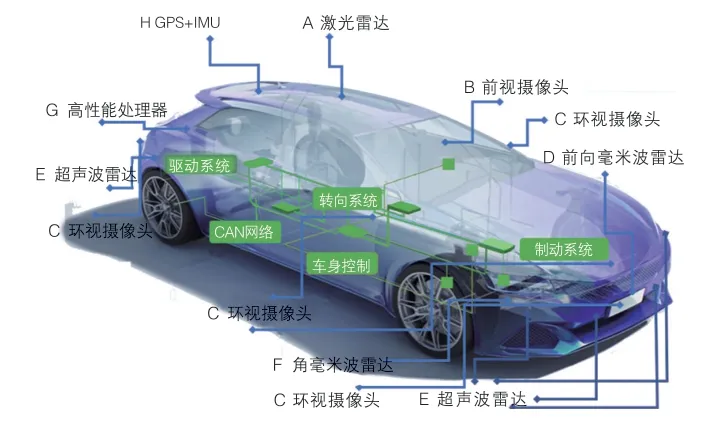
图1 自动驾驶车硬件集成
从整体架构上,目前国内主流自动驾驶主要分为感知层、决策层、控制层。各大主企业目前核心竞争力体现在算法层面的研究。基于嵌入式平台的自动驾驶系统核心算法研究主要解决障碍物检测准确度低、误识别、误检测率过高问题和无卫星导航信号的异常状态下的自动驾驶状态保持和路径规划问题,包括基于多传感器信息融合感知算法、多传感器融合定位算法等。
2 自动驾驶法规政策
自动驾驶这个概念之所以得到快速发展,也离不开各个国家在立法上的推动。以美国为例,美国每年基本上都会发布一个和自动驾驶相关的政策,2020 年发布了自动驾驶汽车准则4.0,2021 年1 月11 日发布了《自动驾驶汽车综合计划》,一方面推动技术科学的监管,简化豁免的程序,同时也举例说明了一些示范营业厅的场景,意在推动自动驾驶的示范。中国近期也发布了《智能网联汽车生产企业及产品准入管理意见》《智能网联汽车道路测试与示范运营管理规范(试行)》,自动驾驶的测试和示范管理规范,解决了前期多地测试规范不统一,同时多地并不互认结果,造成企业负担比较大的问题。这个规范发布之后部分企业在北京亦庄也通过测试拿到了自动驾驶测试牌照。
从智能网联汽车企业及产品转入管理意见的角度来看,中国对于智能网联汽车的管理思路逐步清晰和规范。从原来注重汽车功能安全,到现在面向个人隐私的数据保护、数据安全和网络安全都有了详细的要求。从2016 年至今,我国在各类政策法规上都提到了智能网联汽车,从《汽车产业中长期发展规划》到《智能汽车创新发展战略》,使得行业快速发展。商用车智能化方面,随着近年来国家政策以及行业法规,包括GB 7258 要求,JT/T1094,JT/T 1178 等,也推动了智能网联汽车产业链的发展。

图2 CATARC 自动驾驶系统架构
3 自动驾驶技术应用场景
自动驾驶技术的应用场景众多,呈现百花齐放的景象,有专注于矿山场景的,专注于环卫的,包括港口和干线物流。目前行业普遍认为,自动驾驶一定会从封闭区域逐步向半封闭区域最后向城市复杂路况演进。技术上从易到难,从更容易落地到更广阔的市场演进。区域化特定场景对于自动驾驶的需求是提高其性价比及可靠性,可能并不需要一个全能的车,而是作为一个特种装备,像港口的塔吊一样,通过持续可靠的运行,不断提高它的效率和性价比。
(1)园区物流。中国的物流枢纽有23 个,1600 多家物流园区,整体市场规模达千亿级别,同时该场景也是一个相对容易实现的场景,它的特点是运行路线、载重载货类型相对固定的,运行速度基本在30km 以下,人车分离,有固定车道,并可进行适当改造,非常适合自动驾驶落地的场景。当然这里面也会涉及到一些特殊化的作业要求,比如说自动驾驶轻卡需要在停靠时保证精准度,保证接货时的衔接,同时还需要有远程的监控,在发生拥堵的时候云端能够对它进行调度,比如说绕过障碍、超车等,这样的场景一般会用在智慧工厂、智慧园区。
(2)园区接驳。该场景一般设置循环运行的路线,并且它设有固定的站点接驳。从技术实现上存在部分难点,比如说载人则需要考虑驾乘舒适性,同时还需要考虑行人和要接的人旁边的驾驶行为或者他动作的预判。同时通过APP 调度进行定制接驳服务。目前园区接驳对智能化程度要求越来越高,比如说在一些景区或者在园区,需要实现红绿灯,V2X 的交互等功能。
(3)港口。从数据上来看,全国有87 个港口,有145 亿吨的吞吐量,这个市场还是非常重要的场景。交通参与者都会有严格的通行管理要求,因为要跟塔吊进行协同,对其定位精度的要求也是特别高的。比较大的港口还会涉及到多类型的路口需要交叉通行,优先级如何设定,以及自动驾驶车辆和人工驾驶车辆混行的情况。自动驾驶车辆一定要融入到生产作业系统,在港口就需要生产管理系统TOS 或者ECS,很多大的港口已经在做智能化改进了。如何在港口里面进行车辆调度、路径规划,包括平台的管理以及数据监控等,这都是未来港口未来的智能化改造思路。
(4)干线物流。全国高速公路大概有13 万公里的路长,加上72 条国道,整个里程大概30 万公里左右。对于这样一个相对容易落地的场景,不光是主机厂,各大商用车自动驾驶公司头部企业都会去积极抢占。但是也有比较难落地的地方,比如在长隧道中,包括隧道光线的间断遮挡,逆光等。开高速的时候也会发现,有很多路线设置的时候也有不太尽如人意的地方,包括刚出隧道就要下匝道,这对于自动驾驶来说也是一个非常大的挑战。同时该场景场景对于传感器、控制器、执行器的要求也比较高,需要做到控制器的功能安全,做到传感器的可靠性。机厂在干线物流这块的开发也是从易到难,先从L2+开始,未来逐渐根据资源成熟度和硬件成熟度往L3 甚至多车协同进行演进。
(5)矿区。我国是资源大国,已探明有储量的矿产159 种,矿山十万多处,目前主板上市的采矿公司有60 多家。矿山的开采及运输主要依靠国内劳动力优势,环境、安全、效率等问题一直是制约采矿业持续发展的重要难题。为提高生产率、降低成本和应对劳动力短缺,急需智能化无人化技术提升行业能力。该场景通过搭建一套包括地面控制中心系统、车地无线通信系统、车载控制系统等完整的无人驾驶控制系统,实现矿用自卸车“装、运、卸”典型作业过程的完全无人自主运行。同时在5G 网络的支持下,可实时对无人驾驶卡车、辅助车辆、智能化调度中心之间高速通信,在保证安全的前提下,缩短车辆编组之间的安全间距,提高整体运行速度与运行效率。
4 自动驾驶技术面临的挑战
(1)软件架构层。从站在主机厂的角度,软件架构至关重要。现在行业普遍认为电子电器架构一定会从分布式到域控制再到中央集中式发展。而至今为止很多都还是分布式架构,很快会向域控制发展,那么分布式架构也有他的用武之地,在传统重卡行业,目前普遍认为这是一个生产作业工具,需要更高的性价比,需要更多功能能够减配,这就造成了模块化的设计思路以及分布式的架构。而越来越多智能化功能进来之后会造成一个问题,也就是控制器越布越多,布置越来越复杂,车重有所增加,同时各个传感器、控制器之间不能做到算力统筹调度资源浪费。这也就是说我们认为中央集中式一定是方向,但还需要一点时间。
从主机厂来讲E/E 架构转变对能力的重心也不一样,分布式阶段可能更加关注各种原理和整车的物理拓扑,总线协议等等。随着域集中式到来更加关注的是功能如何进行分配?软硬件架构及算力如何设计?功能安全和信息安全如何分解和考虑?以及OTA 数据安全的考虑,而随着架构到中央计算平台阶段,可能会更加考虑车路协同等更为复杂的问题。
(2)感知层。对于自动驾驶系统而言,环境感知技术是非常重要的,之前国外出现的多起事故的出现就或多或少跟环境感知相关。因为它需要搭载各种各样的传感器,各类传感器数据同步、融合,以及能否生成一个可持续跟踪的稳定的目标。另外,站在定位角度来讲,定位少不了的是卫星定位,但是卫星定位受电离层误差等各个方面的影响,本身的定位精度就不够高,这就需要结合星基增强或者地基增强来进行精度的提升,同时还要解决定位喜好受到干扰或者定位信号受到遮挡等情况,我们还需要IMU 介入以进行航迹推算,还需要多传感器融合进行及时定位的处理,最终形成高精度的定位。
(3)决策层。决策方面一般来说有两类思路,一类是传统的解决方法,从感知到融合到决策到控制,决策方法会涉及A*、D*、MPC、LQR 等等,另外一类是AI 的方法,端到端决策系统感知数据进来之后直接可以给出控制指令,这个方法目前还比较初步,现有应用影子模式方法进行AI 训练,在有驾驶员的时候也会有模式在后面进行持续的对抗训练,不过这里面还有一个问题是司机的驾驶行为是否足够好。
(4)决策层。控制执行方面是自动驾驶一项非常重要的环节,这也决定了未来自动驾驶的精度或者自动驾驶可靠性,这里面也经常会用到PID、MPC、模糊控制等常见的算法,需要把制动、转向、动力上的精度不断提高,降低延迟。跟乘用车不同,商用车的底盘系统比较复杂,控制起来仍需要很多安全策略以及各系统的统一调度。举例来讲制动系统包括ABS、EBS、ESC、缓速器等等,如何提供一个高可靠、高执行效率且低延迟、精度较高的制动呢?目前各大主机厂都在进行此类技术的攻关,确保线控底盘的可靠性、稳定性。同时,作为自动驾驶的基础,各个系统之间的协同以及冗余安全设置也十分重要。
(5)车路协同。我们国家将自动驾驶的技术路线定义为智能+网联,那么不得不提的是V2X,广义的网联化,一般按照三个阶段,信息交互、协同感知、协同控制,从硬件平台来讲有几大部分,车路协同管理平台,车载终端系统等等,它能够带来整个交通效率的提升以及信息服务。另外值得一提的是V2X 还能够提供超视距的感知,自动驾驶单车系统的感知距离毕竟是有限的,同时也会收到各类环境的影响,那么通过车路协同技术以及路端感知系统能够极大的提升感知的鲁棒性。
其实自动驾驶的落地仍面临很多挑战,有技术上的、基础设施、标准法规等等,涉及到芯片,算力,计算平台,人机交互,功能安全,信息安全,预期功能安全,标准法规以及驾驶员的培训等等,随着标准法规的不断完善,技术方面的持续进步,相信自动驾驶技术将会最终改变我们的生活。
猜你喜欢
汽车实用技术(2022年3期)2022-02-23
内燃机与配件(2022年2期)2022-01-17
新能源汽车报(2018年40期)2018-05-14
中国计算机报(2018年42期)2018-01-31
中国计算机报(2018年41期)2018-01-22
小天使·一年级语数英综合(2017年3期)2017-04-25
汽车博览(2016年9期)2016-10-18
小学阅读指南·低年级版(2016年1期)2016-09-10
小天使·一年级语数英综合(2015年10期)2015-10-14
中国总会计师(2015年5期)2015-06-16
