
基于植保无人机近地面施药技术的研究*
2022-07-05 05:31王丹丹李宏杰
南方农机 2022年13期
王丹丹,杜 雪,李宏杰
(1.上海电子信息职业技术学院电子技术与工程学院,上海 201411;2.安阳工学院电子信息与电气工程学院,河南 安阳 454000;3.哈尔滨工程大学自动化学院,黑龙江 哈尔滨 151000)
0 引言
农作物在生长过程中经常遭到病虫灾害的威胁,病虫灾害成为了抑制农作物产量的一个重要问题。除虫、除草、灌溉等一系列植保工作是农作物从播种到丰收的必经过程,因此,传统的农业植保方式对于老年人来说是一种负担。由于低效率的劳动力和危险性较大农药喷洒的工作已不适合现代农业,喷雾性农药的缺点也越来越明显。为了更有效、更科学地进行农药喷洒,新的植保方式脱颖而出。早在20 世纪初期,美国、日本、德国、荷兰等一些发达国家已经研发了一些农业自动化设备,一台设备能达到人工效率的数十倍。无人机(UAV)[1-3]具有高效率运行、可垂直起降、安全性能高、机动性强等优点,可以很好地完成农业信息收集和杀虫剂散发工作,工作人员也可以通过间接接触来控制工作。使用无人机喷洒农药具有很多优点,如药水在螺旋桨产生的下旋力作用下雾化得更均匀,雾化后药水附着率可达99%,有效降低化学污染。所以,植保无人机喷洒农药技术的研究势在必行。使用人工背负式喷药机喷洒农药和使用无人机喷洒农药的作业场景分别如图1和图2所示。

图1 人工背负式喷药机喷洒农药

图2 无人机喷洒农药
在搜索引擎上检索,课题组发现最早在2006 年的新闻中就已经出现了“农业+无人机”的组合,2009年就出现了植保无人机的提法。2017年,农业部联合财政部等发布农机购置补贴通知,引导植保无人飞机(亦称农用遥控飞行喷雾机)技术开发和规范应用,助力农业绿色发展。国外对植保无人机的应用很早,美国、日本等国家应用农业航空产品的时间超过30 年,最近几年农业无人机的渗透率更是达到了50%以上。
为了减轻农民的劳动强度,预防害虫和疾病,使用无人机喷洒杀虫剂成为了现代植物保护作业不可缺少的部分。我国开展植保无人机的研究相对较晚,但基于中国农业强国的特点,精准农业及植保无人机导航技术[4-6]正处于飞速发展阶段。同时,中国的农航开发也根据全国各地农耕地不同而进行调整,同时推进了“多机型和多种运营方法”。针对精准农业及植保无人机导航技术落后等问题,课题组设计了一台操作简单的小型植保无人机,重点介绍了飞行姿态控制算法[7-9],并采用模糊PID 控制算法进行模拟实验[10],通过调整参数,得到较为稳定的飞行器姿态参数,表明了该算法用于植保无人机姿态估计的可行性及稳定性。
1 植保无人机飞行动力学分析
无人机的电机电压与力矩方程:
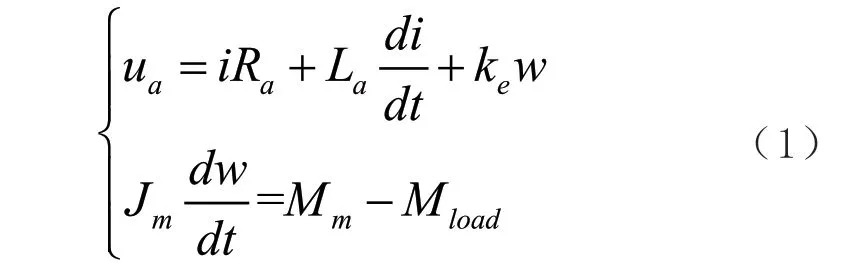
无人机所选用的电机较小,所以电感也比较小,可忽略不计,将式(1)简化为:

电机动力学方程改写为:

选用三相无刷直流电动机,当线路接通后接收机接到遥控器发射的控制量后,电机会随着不同的指令进行转速调整,使无人机达到预期的飞行姿态。
2 模糊PID控制算法
当植保无人机执行喷洒任务时,其自身质量会不断减小,无人机执行的是变载荷飞行;本研究选用模糊PID 控制算法,通过设置PID 参数来控制无人机在变载荷时依然能够平稳地进行植保作业,并对无人机飞行姿态进行了相应仿真实验。
模糊PID 控制算法,将误差和误差的变化率作为整个系统输入的值,控制原理框图如图3 所示。图中,表示系统的输入值,表示系统响应的输出值。

图3 模糊PID 控制原理框图
2.1 模糊PID控制系统的设计
定义输入、输出变量论域的模糊子集及其隶属函数,如表1所示。
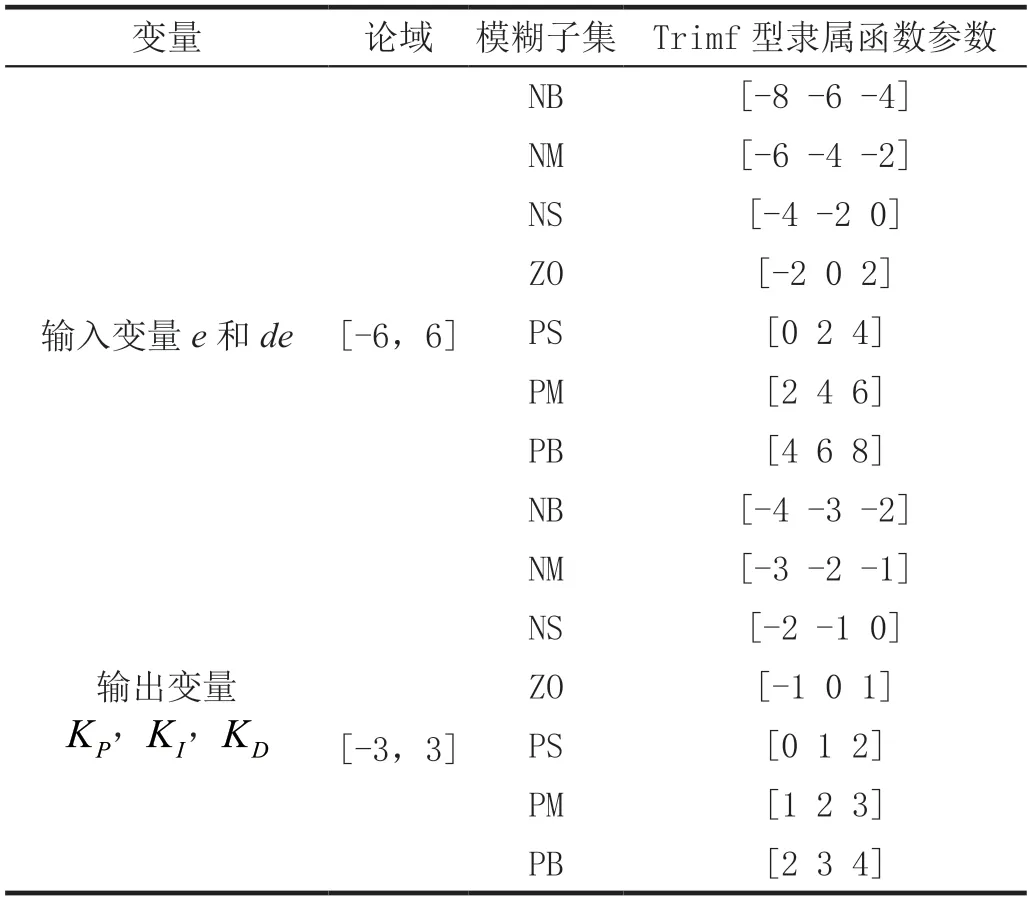
表1 输入、输出变量论域及其隶属函数
通过以上设计的模糊控制规则表和输入、输出变量论域的模糊子集及其隶属函数,即可建立模糊控制系统进行仿真。
2.2 模糊PID控制系统的仿真
利用Matlab 对植保无人机的飞行姿态进行模糊PID 控制仿真,输入相应指令后便可得到模糊PID 控制系统的动态仿真环境,实时变化的误差e和de两个输入值通过模糊推理对PID 三个控制参数进行查表、计算、整定之后并计算当前的KP、KI、KD值以达到对PID 控制参数进行在线自动修正的目的。其模拟仿真流程图如图4 所示。

图4 模拟仿真流程图
根据以上内容确定模糊推理系统的结构,本设计的模糊推理结构由输入e和de以及输出KP、KI、KD构成,编辑后的变量模框区如图5所示。

图5 编辑后的变量模框区
建立植保无人机模糊PID 控制系统的Simukink仿真模型,如图6所示。

图6 利用模糊逻辑控制器建立的仿真模型
将设计好的FIS 文件导入模糊逻辑控制器中,运行仿真得到的结果如图7所示。

图7 俯仰角阶跃响应
由图7 可知,σ=0.38,td=0.115 s,tr=0.4 s,ts=0.9 s,系统的稳态误差较小,这足以说明模糊PID控制对时变载荷下的植保无人机控制系统具有很好的调控性。
2.3 经典PID控制与模糊PID控制的对比分析
为了更直观地分析出经典PID 和模糊PID 作用于变载荷植保无人机下的优劣势,将二者都应用于飞行控制系统当中进行仿真,通过示波器仿真图形进行对比分析,经典PID 和模糊PID 控制器分别作用到控制系统当中时输出的仿真图形如图8所示。
由图8 可以看出,在植保作业刚开始时经典PID控制与模糊PID 控制输出相差无几,但是随着植保作业的进行,药液的重量在不断减少,随着控制输入的变化经典控制没有进行更好的实时调整输出,出现了振荡的情况。模糊PID 控制随着控制输入的变化在之前设定好的模糊控制规则当中进行自运算,很好地控制输出,依然能保证无人机平稳飞行,使植保无人机与植物保持一定的相对高度并进行喷洒作业。经典PID控制和模糊PID控制性能参数如表2所示。
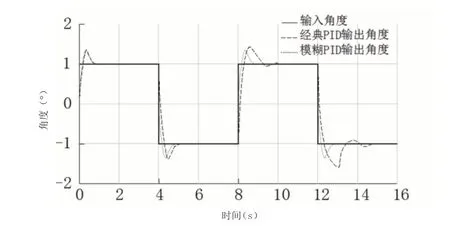
图8 仿真结果对比

表2 经典PID 控制与模糊PID控制仿真结果对比
由上表所示参数可以分析得到:模糊PID 控制算法能够有效地控制无人机的飞行姿态,且有效地控制植物和无人机之间的相对高度。
3 喷洒装置的结构
药箱、水泵、喷雾泵、喷雾头和软管构成喷雾系统,药液从注入口流入,水泵开启后,药液过软管流入药液注入口,然后通过水泵加压,在出口喷出药液。水管进入转换器,将水流分成两股,并分别连接两根软管使喷头对作物进行喷洒作业。喷洒系统结构图如图9所示。

图9 喷洒系统结构图
使用遥控器控制喷洒装置的开和关,其控制原理如图10所示。
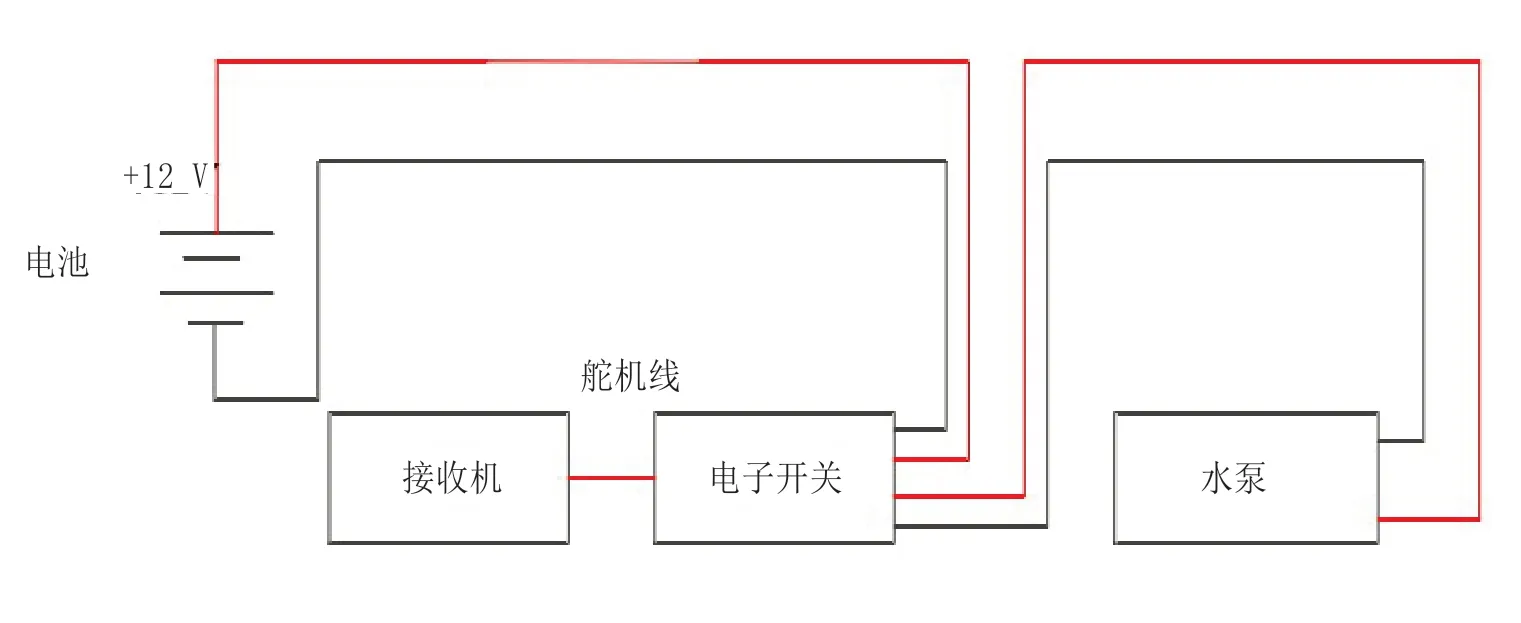
图10 电子开关控制原理
喷洒泵选用的是BPG 蠕动泵,具有体积小、噪声小、寿命长等优点,蠕动泵的进水口接药箱(150 mL),出水口接一个三通用来分流,用BPT 软管连接三通和喷头。当接收到开关信号时隔膜泵开始工作,隔膜泵工作时内部抽成真空,形成压力以达到形成喷雾效果,隔膜泵的流量约为15 mL/min,药液可以连续喷洒10 min左右。
4 植保无人机的组装与测试
对组装好的植保无人机进行植保作业测试,选择好一块田地之后规划喷洒路径,然后进行施药。植保无人机在植保作业过程中有效防止了漏喷、误喷和重喷的不良现象,并且飞行稳定,飞行与喷洒效果达到了预期目标。植保无人机进行喷洒农药测试实景如图11所示。

图11 植保无人机进行植保作业
课题组对植保无人机的整体部件进行选型、安装与调试,通过查阅资料选择植保无人机的各个模块,然后进行安装测试。通过植保作业过程可以看出,课题组设计安装的植保无人机完全能够胜任农药喷洒作业,并且稳定性好,没有出现漏喷、重喷等现象。
猜你喜欢
选煤技术(2022年2期)2022-06-06
中学生数理化·八年级物理人教版(2022年4期)2022-04-26
今日农业(2021年17期)2021-11-26
湖北工业大学学报(2021年2期)2021-04-28
天津农林科技(2021年2期)2021-04-16
农技服务(2020年7期)2020-12-17
中国品牌(2020年4期)2020-11-16
今日农业(2020年18期)2020-10-27
妇女生活(2018年12期)2018-12-14
妇女生活(2018年8期)2018-08-16
