
现代设计方法在机器人设计中的应用*
2022-07-05 05:31王磊元秦翠兰赵群喜
南方农机 2022年13期
王磊元,秦翠兰,赵群喜,张 鹏
(新疆理工学院机电工程学院,新疆 阿克苏 843000)
目前,机器人已广泛应用于社会的各个领域,尤其是工业制造领域更是将机器人作为一种重要的生产设备[1]。因此,对机器人的质量与性能要求越来越高。机器人的性能与质量的好坏将直接影响作业效率与安全。要想提高机器人性能与质量,不仅要提高机器人机械加工制造技术,更要提高机器人的设计水平。随着科学技术的快速发展尤其是计算机和信息技术的快速发展,工程机械设计从传统的设计向专业化、自动化和智能化方向发展[2],也使得设计方法呈现出多样化的特点。设计人员在各类机器人设计的过程中如果不能融入新的设计方法,还是沿用传统的设计方法,不仅会影响各类机器人产品的设计周期,还会影响机器人的质量性能及作业效率。社会精细化发展对机器人的设计提出了更高的要求。因此,为更好地适应各领域对机器人质量功能需求,需要对机器人的设计进行优化,从而提高机器人的设计水平。
1 现代设计方法概述
传统机器人在设计的过程中更多采用经验设计方法对机器人进行设计与再改进,这种设计往往缺乏精确的设计数据和科学的计算方法,所设计的产品较笨重、效率低且可靠性较差。现如今,随着科学技术的发展,设计方法也推陈出新,在机器人设计过程中采用的现代设计方法如图1 所示,其能够显著改进机器人的设计。在设计中利用相关的现代设计理念,应用计算机开发的各种专业软件对机器人进行创新性改进,进而为机器人生产制造企业设计出低成本、高性能的机器人。由此可见,过去传统的机器人设计方法越来越无法满足时代发展的需要。特别是当今计算机信息技术迅猛发展,信息化占据时代主流,各行业设计开发都与计算机相互交融,设计人员借助计算机相关技术,与专业学科结合实现多元化的设计方法,机器人的设计质量明显提高。现代设计方法的显著特点就是计算机信息科学技术和各种现代科学方法的有机结合,体现了设计方法的与时俱进。利用现代的设计方法有助于机器人性能和质量的提高,促使其更好地适应时代发展需要。因此,将现代设计方法应用到机器人设计中,对机器人进行改进,可显著降低机器人设计的成本,有效提高机器人产品性能与质量。

图1 现代设计方法
2 现代设计方法在机器人设计中的具体应用
2.1 现代设计方法之可靠性设计
可靠性是衡量机器人设计质量的重要指标之一,直接决定着机器人的应用前景[3]。机器人既属于精密的机械设备,又要面对复杂的作业环境,导致出现可靠性隐患和发生故障的概率成倍增加,例如我国成功发射的“天问一号”火星车机器人将在火星上进行探测工作,那么在火星环境中其整体可靠性尤为重要,否则无法完成长达数月的探测工作。因此,设计人员在机器人设计过程中,必须进行可靠性分析,建立正确的可靠性数学模型,进行可靠性预计,使设计人员能够根据预计值发现机器人设计中的薄弱环节,如结构设计不合理、电路设计有缺陷、元器件及材料选择不合适、安全系数选择有问题等,以便及时改进机器人设备,进而保证机器人使用的可靠性,提高机器人作业的安全性。火星车驶上火星表面模拟图如图2 所示。

图2 火星车驶上火星表面模拟图
2.2 现代设计方法之CAD计算机辅助设计
计算机辅助设计及分析CAD/CAE 已成为现代设计与制造技术中的一项关键技术,特别在机器人设计制造领域得到越来越广泛的应用。工程技术人员在设计机器人产品的过程中,利用CAD 进行机器人参数化模型设计,利用参数化设计手段生成实体造型[4],减少图纸绘制的工作量,使设计人员的精力真正集中在参数设计中,显著提高了设计的效率。此外,利用CAD 技术可以进行三维虚拟样机制造与虚拟装配设计,动态干涉检验和动态仿真等不需要制造出产品零件就可以进行产品的优化和改进设计,从而提高机器人的设计效率和设计质量,解决工业机器人工程设计中传统的设计方法无法解决的技术难题,同时为机器人控制部分设计和可靠性部分分析计算提供了重要的数据和参考。三维CAD 机器人参数化模型设计,如图3所示。

图3 三维CAD机器人参数化模型设计
2.3 现代设计方法之有限元法
机器人目前广泛应用在各个领域,机器人在不同领域的作业过程受到多种因素的影响,导致了机器人不同部位各结构受力情况较为复杂。例如机器人作业的过程中,其受力结构与工作载荷表现得较为复杂。在对其受力状况分析的过程中,若是使用传统的设计方法,则只能对其表面状况进行分析,不能实行全方位的分析。由此可见,传统的分析方法具有一定的局限性。因此,在机器人生产中利用有限元法对设计的机器人各结构进行详细的力学分析,分析结果精度高、可视化、可靠性强,通过使用现代设计方法——有限元法的设计,可以清晰地知道机器人结构受力的薄弱环节,尽早发现可能的潜在故障,并针对薄弱环节加以改进,从而提高机器人产品可靠性设计水平[5]。并联机器人有限元应力分析图如图4所示。

图4 并联机器人有限元应力分析图
2.4 现代设计方法之ADAMS仿真
机器人仿真的目的在于快速、高安全性地对真实作业场景进行模拟验证,提高工作效率,尤其是在难以到达或者复杂危险的环境中进行精准高效率作业,更离不开生产制造前的反复模拟仿真验证。ADAMS 是目前国际上应用最为广泛的运动仿真软件,通过ADAMS 建立虚拟样机模型,能很好地对机器人进行运动学仿真,仿真的结果以动画的形式显示出来。设计人员可以更直观地观察其真实运动过程[6],进行运动分析,研究其运动规律,进行合理优化,将优化结果信息反馈到机器人设计制造的过程中去,不仅可缩短设计开发周期,也能大大节省机器人研发费用和成本。工业机器人ADAMS 运动仿真如图5所示。
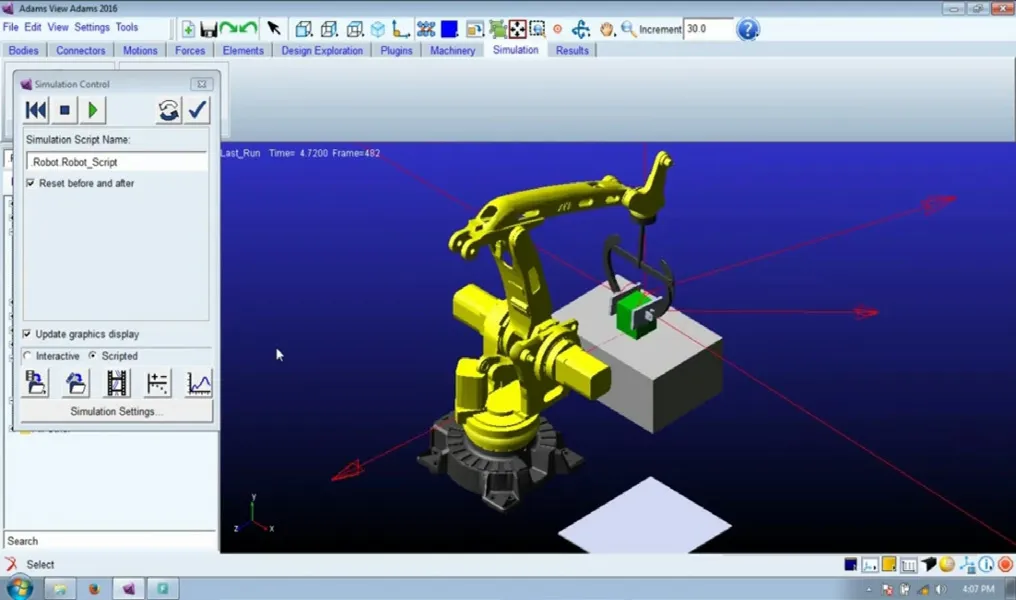
图5 工业机器人ADAMS运动仿真
2.5 现代设计方法之智能设计
随着机器人应用领域范围的不断扩大,机器人面对的作业环境变得越来越复杂与不确定,对机器人自动化、智能化的需求也越来越高。目前,人工智能技术是计算机科学技术的前沿科技领域,现在的机器人正在逐步向智能化方向发展。传感检测、模式识别、深度学习和自主决策功能等智能技术,使其能够产生类似人类的智能大脑,模仿人类各种感官功能动作[7],使机器人拥有自我学习和独立工作的能力,能够胜任人类难以到达或者复杂危险领域无法胜任的工作,其高效率和高精度的操作过程是人类无法完成的,这大大提高了人类的生产效率和生活质量。未来机器人的智能化将创造更大的社会价值,对社会产生更积极的促进作用。
2.6 现代设计方法之绿色设计
进入21 世纪以来,“绿色、环保、低碳”的可持续发展理念已成为世界各国的普遍共识,绿色设计、绿色制造已逐渐成为世界各国各领域的新的制造模式[8]。传统的设计方法制造更多追求经济利润,忽视环保的重要性,造成资源大量浪费和环境污染,现代设计方法就是要将绿色理念融入到产品机械设计之中,包括产品的绿色材料选择设计、绿色制造过程设计、绿色可回收和重复性使用设计等[9-10]。在机器人设计过程中,设计人员尽可能采用绿色理念合理优化机器人的结构和方案,使得设计产品具有良好的环境属性,使资源消耗和环境负影响降到最低。因此,绿色设计是现代设计方法中一项重要的设计。
3 结语
总而言之,在现代设计方法中还包含了其他的多种设计方法,较为常见的有创新设计、并行设计、模块化设计、虚拟设计及相似性设计等等。因此,在机器人的设计过程中,设计人员应根据不同机器人的功能、作业环境等实际情况,合理运用现代设计方法设计出有效的机器人产品,从而提高机器人的质量和生产效率。
猜你喜欢
电子制作(2018年23期)2018-12-26
北京航空航天大学学报(2017年6期)2017-11-23
电子制作(2017年2期)2017-05-17
电子制作(2017年2期)2017-05-17
故事大王(2016年7期)2016-09-22
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
儿童故事画报(2013年3期)2013-06-24
小哥白尼·军事科学画报(2009年9期)2009-09-14
