数字近景测量技术在多普勒8.5m天气雷达反射面测量中的应用
2022-07-04 12:07:30尤权利
河北省科学院学报 2022年3期
尤权利
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
0 引言
多普勒8.5m天气雷达[1]反射面面型精度的测量在实际工程中较为常用的是电子经纬仪[2]测量法,但是电子经纬仪的高精度测量对温度、气压、风、振动等环境要求较高。测量时还会引入一些轴系误差、人为观测误差,受人的主观因素影响较大,测量一个目标点需要几分钟,效率很低。
与电子经纬仪测量方案相比,数字近景测量在反射面组装前,可以将测量标志、靶标与基准尺提前放置在单块反射单元上,减少人工进入反射面放置靶标造成反射面形变的误差。数字近景测量不仅便携,还有无接触的测量优点以及测量精度更高,噪声小、对周边温度环境影响小、测量快等特点,还能保证测量质量和生产任务周期。
1 反射面面型精度测量
1.1 数字近景测量原理
从两个(或多个)位置拍摄同一工件或目标,以获取在不同视角下的图像,利用三角测量原理获取被测点的三维坐标,其测量原理与经纬仪一样,图1是空间角度交会法。
1.2 数字近景测量系统及流程
测量系统由测量相机、基准尺、定向靶、人工标志等组成,如表1所示。
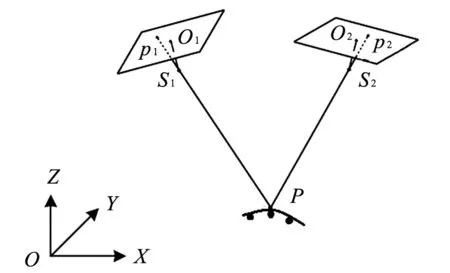
图1 空间角度交会法示意图
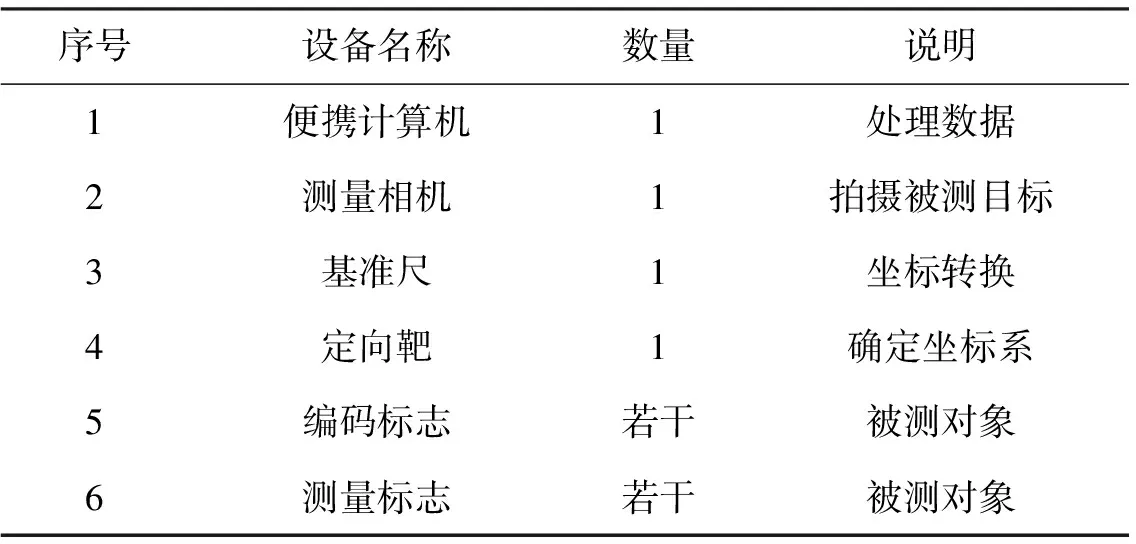
表1 摄影测量的组成
测量流程:(1)像点坐标提取:在被测物体上粘贴标志点及编码标志,放置定向靶和基准尺;(2)概略定向:对被测物体拍摄像片;(3)像点匹配:图像处理,提取像点坐标,识别编码标志、定向靶;(4)光束法平差;(5)结果分析。
1.3 面型精度测量方案
本次测量采用V-STARS工业摄影测量系统[3]测量天线面型精度,采用V-STARS系统的定向靶、编码标志和基准尺。
(1)测量误差分析。摄影测量的精度受很多因素的影响,如相机性能、被测目标尺寸、像片数量、测量网形强度等。
(2)反射面面型误差分析。反射面面型精度是通过均方根(R.M.S)来描述的,其定义公式为:

1.4 测量网形设计
1.4.1 测量网形分析
摄站相对被测物体的方位决定了测量网的形状,在实际测量过程中,被测物体往往是固定不动的,除了要顾及前面提到的影响测量精度的各种因素外,还要考虑现场可用空间、相机视场角、景深和摄影标志对入射角的限制等因素,基于以上测量网的规划要遵循以下几点:(1)每个标志点被四个以上不同的位置所拍摄。(2)从多个不同位置的摄站对标志点进行交会测量,不仅能提高精度,而且还由于增加了多余观测值,可以提高测量结果的可靠性。(3)为了交会角质量和标志入射角质量间平衡,使相机与被测物体中心成45°角。(4)每个摄站都能拍摄所有标志,保持所有像片间有100%重叠。
1.4.2 网形设计
根据数据计算软件对网形的要求,作出对应的设计:(1)像片的概略定向。每张像片需要有2个编码标志及12个以上测量点;(2)像点自动匹配要求。每张照片的成像至少有3张不同位置的像片;(3)自检校光束法平差;(4)尺度要求。长度1.2m的基准尺。
根据以上分析、计算以及天线单块及装配后的面型精度分析要求,得出:在每块面板上贴16个直径为12mm的圆形反光测量标志,16×16=256个测量标志点。每块面板布设2个编码标志,共计32个。基准尺长度1.2m。
使用INCA3相机对天线进行拍摄,拍摄距离在5m~6m范围内,每次测量各拍摄约120张像片。
2 测量方案验证
2.1 测试过程
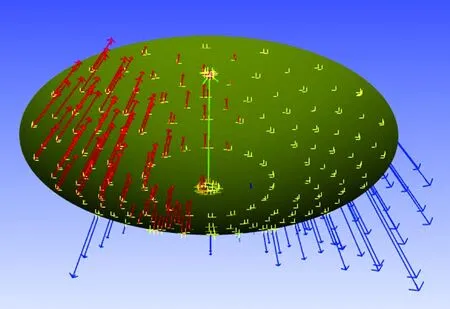
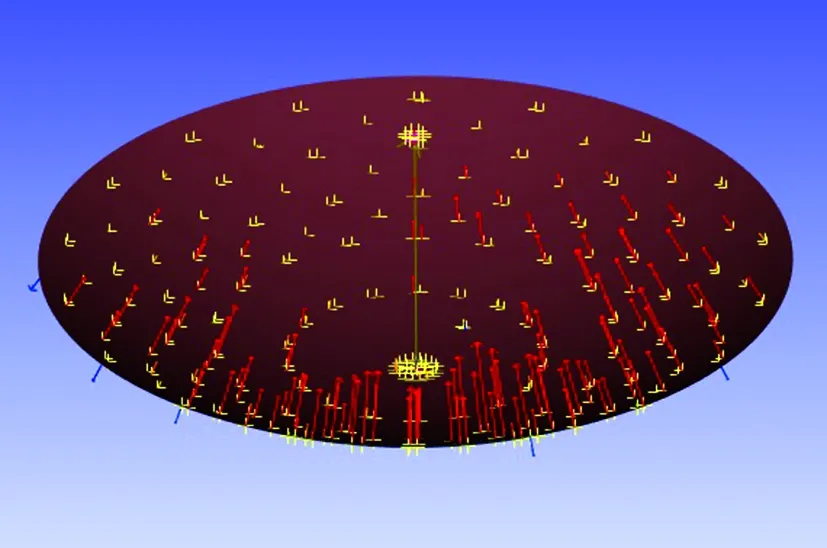
利用INCA3 相机拍摄像片,单次测量拍摄约120 张,导入V-STARS 软件处理得到测量点,将测量点坐标转换[4]至设计坐标系下,将测量点坐标与天线设计模型做比对得到天线面型精度。经过4次摄影测量,3次精度的调整,如图4所示。
2.2 测试结果计算
根据上一步测量点与理论数据点,计算出偏差值,见表2。根据偏差值得出测试结果,见表3。
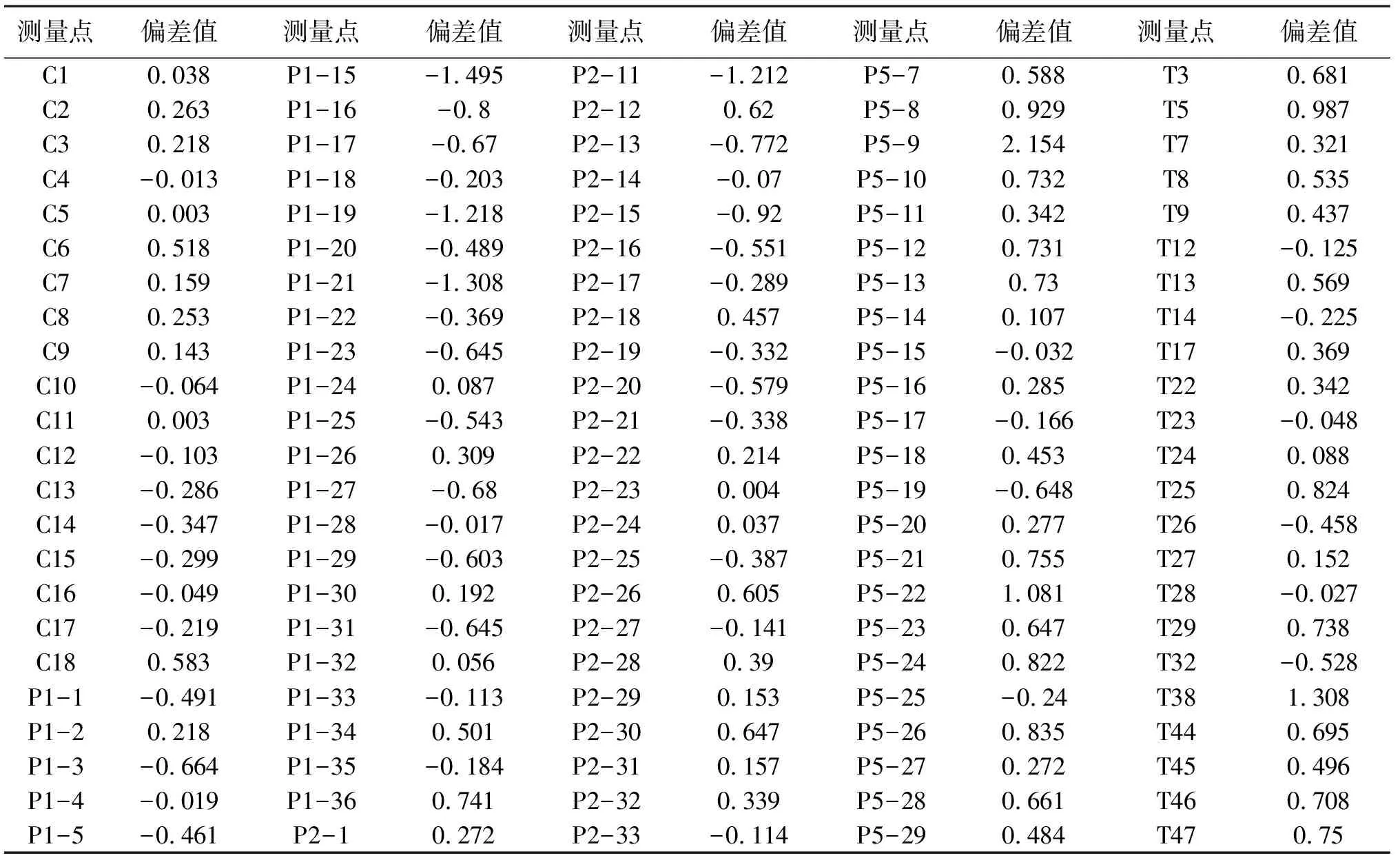
表2 理论数据点与测量点偏差值
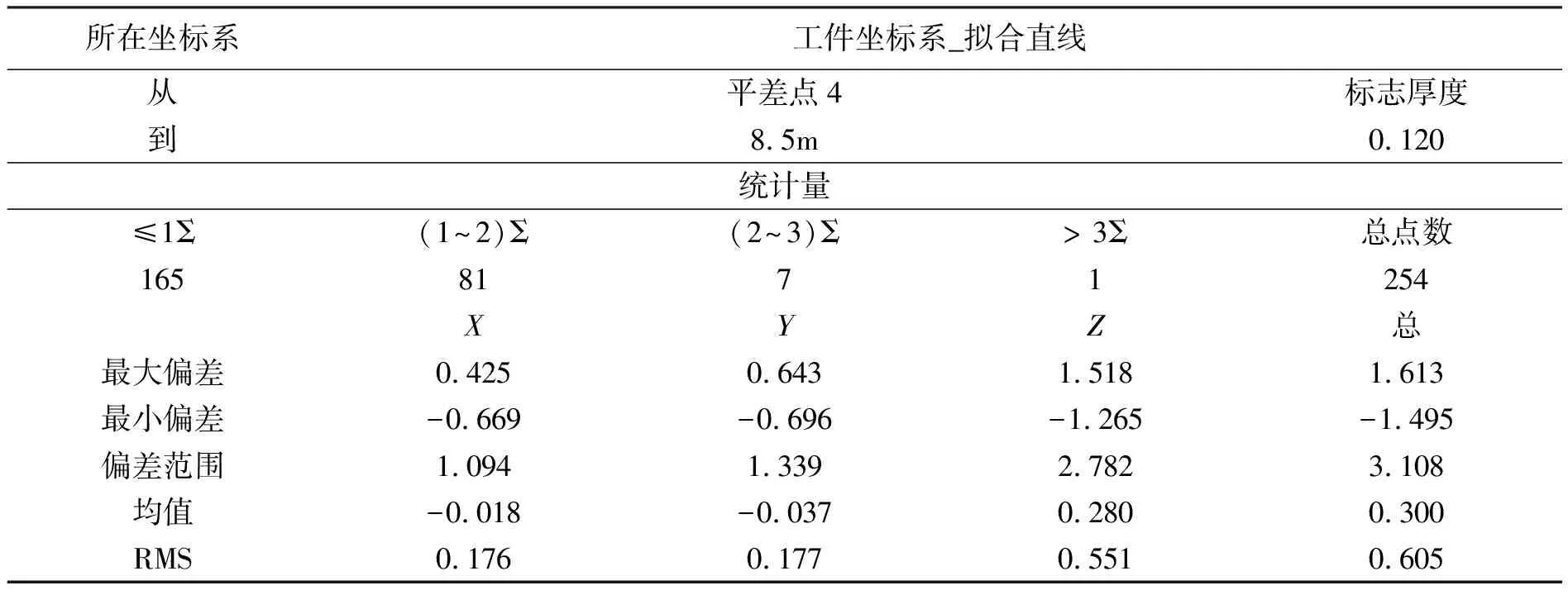
表3 测试计算结果
经过计算,最终结果精度(RMS)为0.605mm,小于设计要求的面型精度RMS≤0.76mm。
3 结论
从研究结果中可以看出,与传统测量相比,利用数字近景测量指导天线调整,能够快速、准确地将天线面型调整至设计状态,并给出针状图和各处的变形值,体现出数字近景测量的可靠性和适用性,满足设计使用要求。
猜你喜欢
计算机测量与控制(2024年2期)2024-02-29 04:22:22
科学(2022年4期)2022-10-25 02:43:50
中国特种设备安全(2021年5期)2021-11-06 05:09:28
青年文学家(2021年1期)2021-03-24 21:12:54
测控技术(2018年12期)2018-11-25 09:37:20
现代测绘(2018年3期)2018-09-13 09:34:46
传感器与微系统(2018年7期)2018-08-29 00:44:24
科学与财富(2017年19期)2017-07-19 10:59:15
长江工程职业技术学院学报(2017年2期)2017-06-19 18:49:05
星星·散文诗(2015年34期)2015-10-26 19:25:18