基于LoRa无线通信的厂房洁净度远程监测系统研究
2022-07-02 06:09盖昊宇张佑春
太原师范学院学报(自然科学版) 2022年2期
盖昊宇,张 震,朱 炼,张佑春
(安徽工商职业学院 应用工程学院,安徽 合肥 231131)
0 引言
现阶段,产品生产和科学活动都对厂房环境提出了更高要求,要求厂房向微型化、高纯度、精密化转型,且随着洁净技术的发展,还要严格控制厂房环境的污染物[1].由于工业产品具有成本高、体积小的特点,若厂房洁净度较低,会对工艺设备造成污染,影响产品合格率,搁置科学活动进程,导致生产浪费,甚至带来严重的经济损失[2].为衡量厂房洁净程度,有必要设计厂房洁净度远程监测系统,使工作人员不需要出入生产环境,也能实时监测厂房环境质量,保持厂房环境的洁净度,具有重要意义[3].
当前远程监测系统相关研究已取得较大进展,文献[4]提出基于DER通信技术的远程监测系统,通过地面远程监控、并网监控、无人机飞行器3个模块,传输监测数据和视频图像,但该系统元件布局复杂,无线通信丢包率较大.文献[5]提出基于云技术的远程监测系统,利用激光器采集图像,通过文件传输协议,远程传输至云服务器和PC机,但该系统由于信号衰减较快,监测数据误差较大.针对以上问题,结合现有的研究理论,提出基于LoRa无线通信的厂房洁净度远程监测系统.
1 基于LoRa无线通信的厂房洁净度远程监测系统设计
1.1 厂房洁净度远程监测系统硬件设计
1.1.1 基于LoRa无线通信的系统整体构架设计
由远程用户中心、中心基站、信息采集3个模块,构成厂房洁净度远程监测系统整体构架.系统整体结构如图1所示.

图1 厂房洁净度远程监测系统整体构架
分别把信息采集模块和中心基站,作为监测节点和汇总节点,利用信息采集模块,采集厂房洁净度数据,经由LoRa无线通信,把数据发送至中心基站[6].汇总节点对接收数据进行打包,保存、解析和校验数据,分析数据的地址信息,判断数据对应的传感器,利用通用分组无线业务网络,把数据包信息接入互联网,上传至远程用户中心的服务器,服务器对数据进行接收、分类和存储,最后通过上位机,实时保存和显示厂房洁净度监测数据[7].
信息采集模块选择PM2.5传感器和激光粒子传感器,测量空气中0.5 um粒径的粒子浓度,传感器的通信协议都采用串口通信,利用支架,把传感器固定在采样点,通过排气风扇,分别在传感器进气口和出气口,吸入和排出厂房的空气,检测空气洁净度[8].利用A/D转换控制器,把模拟信号转换为数字量,选择控制器的内置元件,包括基准电压源、光电二极管等,利用一个射随器,构成A/D转换的阻抗匹配网络,保证各个传感器与采样芯片的阻抗相匹配.选取电压源和电源适配器,组成电源,厂房内部采用有线传输方式,使用总线串联各个采样点,汇总传感器采集的信息数据,传输至微处理器.微处理器通过LoRa网关,经由SPI总线,发送数据至半双工传输的收发器,利用收发器接收和发送监测数据,选择SX1278芯片,作为射频芯片,利用射频开关,切换收发器接收和发送两种模式,使微处理器能够访问LoRa无线通信的设备节点[9].
中心基站的电源由稳压芯片、锂离子电池和太阳能板组成,利用接线端子,支出一个电源分支,把交流电转化为直流电,通过太阳能板功率的调节,起到短路和过流的保护作用[10].微处理器采用STM32F4核心芯片,该芯片具有3个低功耗模式,通过待机、停止、睡眠3个模式的切换,节省系统运行功耗.至此完成基于LoRa无线通信的系统整体构架设计.
1.1.2 优化LoRa无线通信收发器
数据远距离通讯时,障碍物会对信号产生衰减作用,为此,优化LoRa无线通信收发器,高穿透传输监测信号.收发器连接大容量的LoRa网关,帮助信息采集模块和中心基站的微处理器,接入LoRa网络.合理分布收发器的元器件,防止接地线和信号线互相影响,在MSP430F149芯片内部配置USB总线,外接35MHz晶振,采用上拉方式的复位管脚,通过复位操作,保证高电平运行和低电平有效,从而提高共模干扰的抑制能力[11].将串口电路和时钟电路,作为收发器的外围电路,调整收发器电极上的电位信号,包括频率、峰值、相位等,其中时钟电路采用DS1302实时时钟芯片,工作电流小于1微安,满足系统低功耗要求,按照监测数据的次序,读写时钟寄存器,以数字形式逐位传送数据,为每个时钟字节的读写,提供12个脉冲时钟,串口电路利用地线准位,确定信号的电压准位,为防止监测信号产生偏移,应保持收发器和LoRa网关的地线基准一致,维持两端设备基准位相同.收发器发送数据前,处于节能的待机状态,LoRa网关下达数据传输命令后,将收发器切换为发送状态,把监测数据调制成信号帧的模式进行无线传输[12].优化LoRa收发器的信号调制电路,具体如图2所示.
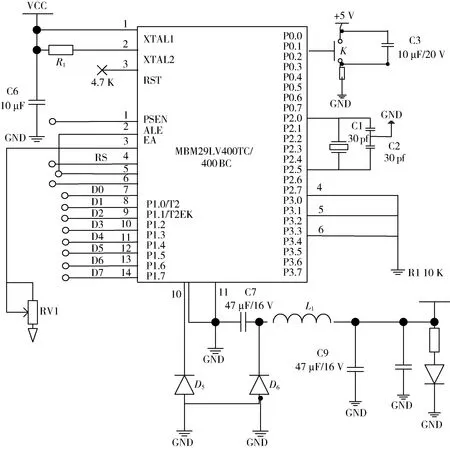
图2 LoRa无线通信收发器信号调制电路
连接信号调制电路的通信接口和光耦隔离器,简化电路结构.利用光电晶体管接收需要调制的信号,由电容和电阻组成滤波放大电路,去除信号的高频杂波.在信号调制电路的信号输出端配置一个稳压器,为电路提供稳定电压,在稳压器进线端加入一个滤波器,抑制电路的电压瞬变噪声,在出线端并联一个0.1uf电容和一个四级放大器,通过正相放大,调节输入电压的零点,保证电平稳定性[13].至此完成LoRa无线通信收发器的优化,实现厂房洁净度远程监测系统硬件设计.
1.2 厂房洁净度远程监测系统软件设计
1.2.1 优化厂房洁净度远程监测信号数字滤波算法
在软件系统中加入数字滤波,消除非周期和周期杂质信号对厂房洁净度远程监测信号的干扰.采用滑动滤波和中位值滤波相结合的滤波算法,设传感器第i次的传输值为ai,设置传感器传输值是否有效的判断条件,公式为:
(1)
其中bi为第i次所取的传感器传输值,aj为过去时刻传感器传输值的均值,C为远程传输值的最大允许偏差,当|ai-aj|小于等于最大允许偏差时,bi值取第i次传输值,当|ai-aj|大于最大允许偏差时,bi值取之前传感器传输值的平均值[14].通过公式(1),完成监测信号的限幅滤波,每次采样都取c个传感器传输值,去除传输值的初始值,加入最新的传输值,再去除传输值的最大值和最小值,取剩余c-2个传输值的均值.中位值加滑动滤波算法表达式为:
(2)
其中bn,d为第n次采样取的传感器传输值,d为去除初始值后的传输值数量,maxbn,d、minbn,d分别为传输值的最大值和最小值,Dn为第n次采样滤波后的传输值.为进一步提高传输值的精确度,对Dn值再次进行滑动滤波,表达式为:
(3)

Q陈教授,您好!我女儿快6周岁了,昨晚睡前跟我说,幼儿园的小朋友都信×××说的话,都不信她说的话。我该怎么引导孩子面对这个问题呢?
1.2.2 优化厂房洁净度统计计算算法
由于厂房悬浮粒子浓度分布不均匀,针对这一情况,优化统计计算算法,统计计算被测环境洁净度.系统采用多点实时监测,根据厂房的工艺操作区,布置采样点位置,计算最小采样点数量A,公式为:
(4)

(5)
其中f为厂房采样点总数.计算采样点粒子浓度平均值的均值误差F,公式为:
(6)
计算粒子浓度平均值的95%置信上限G,公式为:
G=e+gF
(7)
其中g为置信上限分布系数,当采样点总数f为2时,g值为6.31,f为3时,g值为2.92,f为4时,g值为2.35,f为5时,g值为2.13,f为6时,g值为2.01,f为7时,g值为1.94,f为8时,g值为1.90,f为9时,g值为1.89,f大于9时,g值为9.82.将G值作为0.5 um粒径的粒子浓度最终监测值,G值越大,判断厂房洁净度越低.至此完成厂房洁净度统计计算算法的优化,实现系统软件设计,完成基于LoRa无线通信的厂房洁净度远程监测系统设计.
2 系统应用测试
将此次设计系统,与基于DER通信技术的远程监测系统、基于云技术的远程监测系统,进行对比实验,比较三种系统丢包率和监测数据误差.
2.1 设计系统应用
设计系统选择CP-15-A4-CG激光粒子传感器,该传感器量程为0~61 142个/0.1 L,能够检测0.3~10 um粒径的悬浮粒子,工作电压为5 V,可以连续工作10 000 h,PM2.5传感器型号为AD7417,工作电压为2.8~5.5 V,最小监测粒径为0.3 um,数据输出方式为3~20 mA,流速采用大流量.LoRa无线通信收发器的输出功率为1~30 dBm,工作频率为420~440 MHz,采用18位总线的MSP430F149芯片,作为收发器的核心芯片,该数字基带芯片具有16位定时器、8位并行端口、基本时钟模块、比较寄存器、串行通信接口、模拟比较器等,共12个通道,每个通道对应一个频点,支持多个终端接入,可以同时解码50~108个LoRa信号.
以半导体厂房为例,厂房大小为5.9 m×5.9 m×3.0 m,内有两条宽度为0.8 m的生产线,分别为生产传送带和备用传送带,生产线上方安装高效过滤器,净化空气.采样点采用分层垂直布置方式,距离地面的水平高度为0.8 m,在每条生产线内侧布置4个采样点,厂房采样点总数为8个,相邻采样点间距为1.6 m,两端采样点距墙为0.5 m,采样点固定的信息采集设备如图3所示.
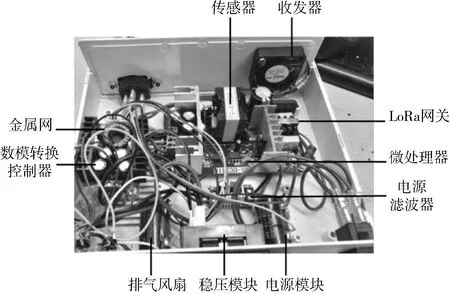
图3 信息采集设备剖面图
微处理器采用C8051F41X核心芯片,将端口引脚定义为模拟输入输出,通过引脚分配的控制,连续读取各个传感器的传输数据.设置激光粒子传感器和PM2.5传感器的采样时间为2 s,采样时间段为7 h,利用Matlab软件,导出并绘制粒子浓度检测数据的图形,滤波前和滤波后的数据如图4所示.
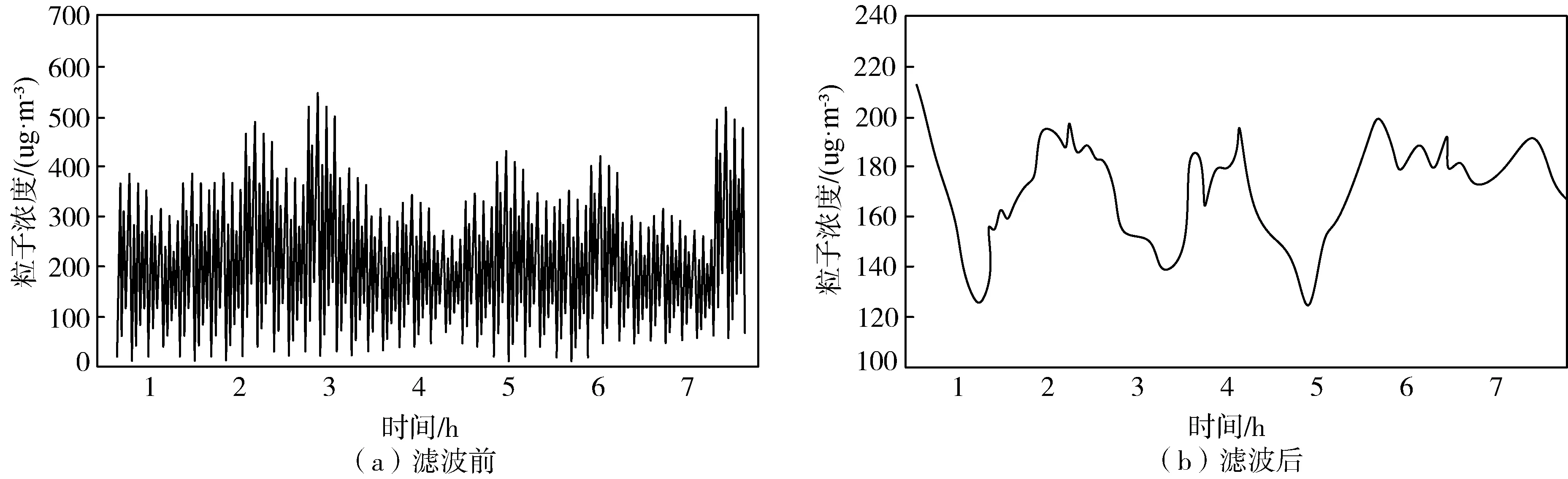
图4 粒子浓度检测数据滤波效果
由上图可以看出,未滤波前的粒子浓度检测数据,存在不符合实际的输出值,输出值总体不够平滑,滤波后的数据曲线明显平滑,去除了超出限值的粒子浓度检测数据.统计计算图4中滤波后的检测数据,得到厂房悬浮颗粒粒子浓度最终监测结果.
2.2 测试结果分析
2.2.1 无线通信丢包率测试
发送1 000个数据包,记录系统终端的数据包接收数量h,丢包率H计算公式为:
(8)
比较三种系统不同通信距离、发射功率下的丢包率,测试结果如图5所示.

图5 丢包率实验对比结果
由图5可知,设计系统丢包率明显小于另外两种系统,能够满足厂房环境数据远距离无线传输要求.
2.2.2 粒子浓度监测误差测试
统计三种系统8个采样点的远距离监测值,与厂房内测得的0.5 um粒径粒子浓度实际值进行对比,具体如图6所示.
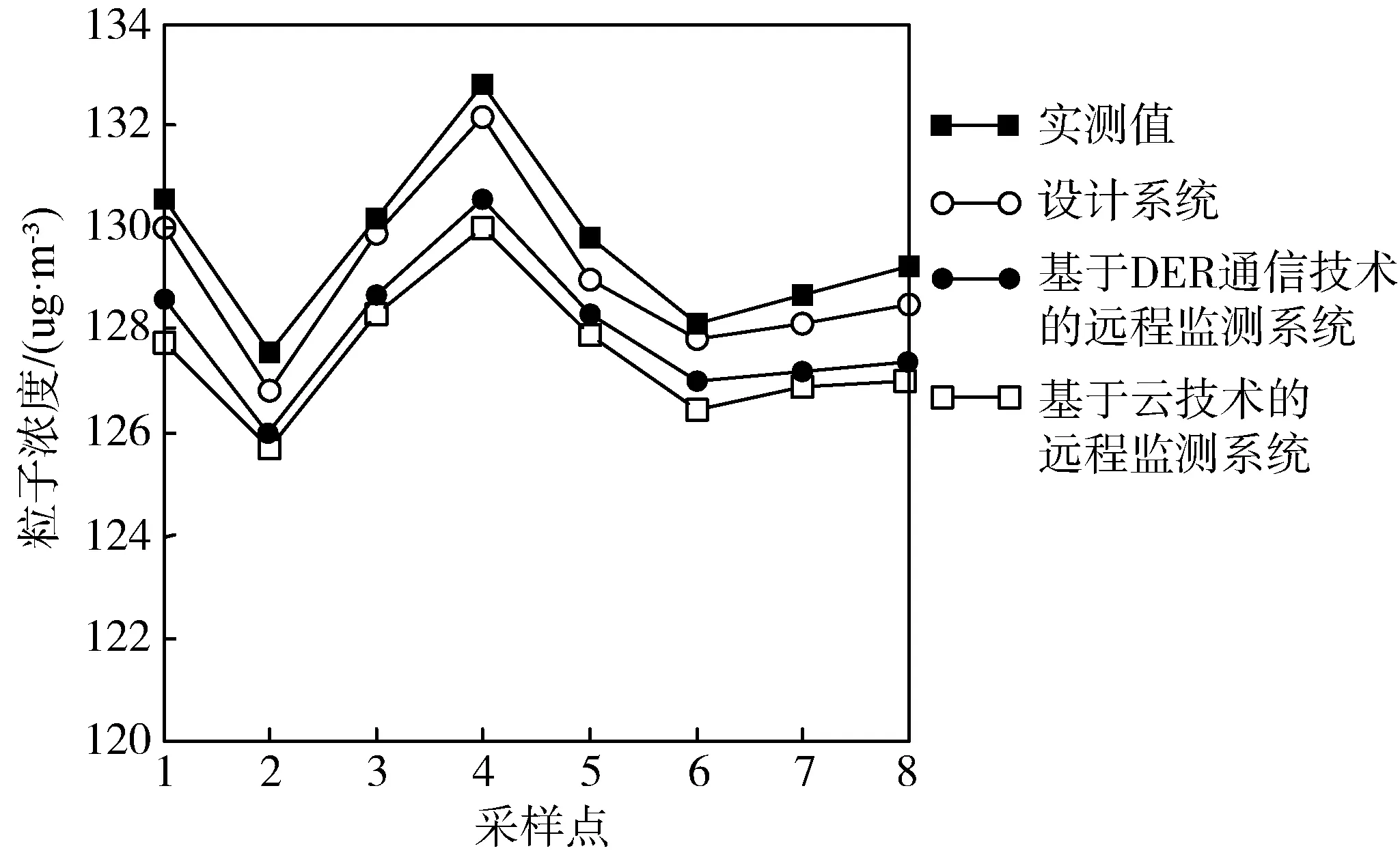
图6 粒子浓度监测值和实测值
计算粒子浓度监测值和实测值的均方根误差J,公式为:
(9)
3 结束语
此次研究应用LoRa无线通信,设计了一种厂房洁净度远程监测系统,减小了丢包率和监测数据误差,提高了系统的远程无线通信性能和数据监测性能.但此次设计系统仍存在一定不足,在今后的研究中,会把LoRa网关和LoRa收发器集合到一块子板上,降低信息采集设备成本,同时编写神经网络程序,预测未来时刻的悬浮颗粒粒子浓度.
猜你喜欢
建材发展导向(2021年11期)2021-07-28
建材发展导向(2021年6期)2021-06-09
华人时刊(2020年23期)2020-04-13
网络安全和信息化(2019年5期)2019-12-23
中国煤炭地质(2019年1期)2019-02-15
现代园艺(2017年22期)2018-01-19
现代电子技术(2017年14期)2017-07-25
科技视界(2016年27期)2017-03-14
现代商贸工业(2016年11期)2016-12-26
科技与创新(2015年20期)2015-10-29