
喷射流浸没深度对喷水推进尾迹场的影响分析
2022-07-02 05:50王仁智蔡佑林于存银
船舶 2022年3期
张 恒 王仁智 蔡佑林 于存银
(中国船舶及海洋工程设计研究院 上海 200011)
0 引 言
喷水推进利用推进泵喷出的高速水流的反作用力来推动船舶航行,是与中高速舰船相匹配的一种新型高效推进方式,具有广阔的应用前景。喷水推进舰船在高速航行时,其喷口处于水面之上,产生的高速喷射流冲击水面,造成复杂的气液两相流,破坏船体的船行波并产生飞溅,如下页图1 所示。此尾迹包含形、声、光、电磁和热等多种物理特征,暴露舰船的航行轨迹,在现代海战中不利于隐身。

图1 喷水推进喷射流
舰船尾迹的相关研究大多基于军事用途,因此国外有关文献鲜有发表。从一些现有的报道和文献可知,国外从二战以来就对尾迹包含的诸多特征着手研究,主要包括尾迹的几何特性、声学特性、光学特性、温度场、气泡的形成与溃灭等。近年来,国内也出现了一些船舶尾迹的相关研究。万鹏程等运用Fluent 软件,引入空气卷吸模型,模拟了气泡尾迹,得出结果:航速对气泡尾迹的几何分布影响不大,但航速提高后,水下相应点气体体积分数会增大。樊书宏等进行了实验室模拟尾迹的气幕声散射特性研究,并对舰船尾迹进行了侧向声散射检测试验,该方法可以持续、有效地检测到目标舰船的尾迹。吴云岗采用黏性流体理论分析法,对有限深流体中的船行波和船行窄尾迹形成进行了较深入的研究,消除了黏性流体中船行波临界边的奇性。针对喷水推进喷射流尾迹的研究,国内外均未见报道。在飞机、火箭等装备的强烈需求下,科研人员开展了大量空气喷射流噪声的理论和试验研究,但对于喷水推进喷射流噪声方面的研究与试验相对较少。现有的试验研究方法集中于水下淹没射流方面(即在相同介质中的射流),预报方法主要集中于声比拟理论、Kirchhoff理论和涡声理论等方法。
本文基于CFD 技术,研究系泊状态下多浸没深度喷水推进船泵一体化的流场,分析并比较喷射流尾迹场流场及其噪声特性,不仅发展了喷水推进技术,更能为提升船舶尾迹隐身及声隐身性能服务。
1 研究对象
本文研究对象为某喷水推进高速艇。艇长约5 m 配备有单台混流泵,喷口直径为130 mm,如图2 所示。为考察喷口浸没状态对喷射流尾迹场及其噪声的影响,在系泊状态下分析了4 种吃水深度,水线高度分别为0.15 m、0.2 m、0.3 m 和0.35 m,使喷口分别处于水面之上、半浸没在水中以及完全浸没在水面以下。其中水线高度0.2 m 时,喷口一半浸没在水中,如图3 所示。各状态下推进器转速固定为500 r/min。
图2 计算对象
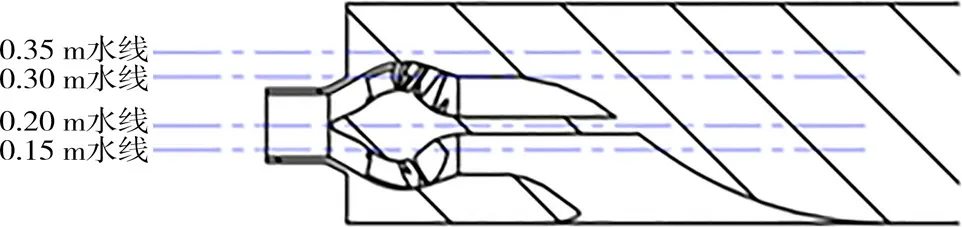
图3 不同吃水深度示意图
2 数值模拟方法
2.1 控制方程
本文采用RANS 方法来求解不可压缩黏性流体流动,控制方程为雷诺平均连续性方程和N-S 方程:

式中:v、 v为时均速度分量;为时均压力;为流体密度;为流体的运动黏性系数。
本文采用两方程SST-湍流模型来封闭该控制方程,近壁面运用全+壁面处理方式。采用流体体积(Volume of Fluid,VOF)法来处理自由液面,即引入流体体积函数来跟踪自由面的变化。
对连续性方程求偏导、对动量方程求散度,同时联立可得
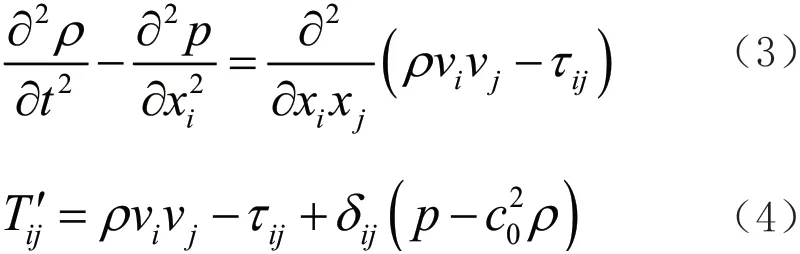
式中:为Kronecker 乘法运算符;为声速,m/s。
远方未受扰动的流体密度 0可设为常数,带入流体的切应力 τ,得到关于密度的波动方程:
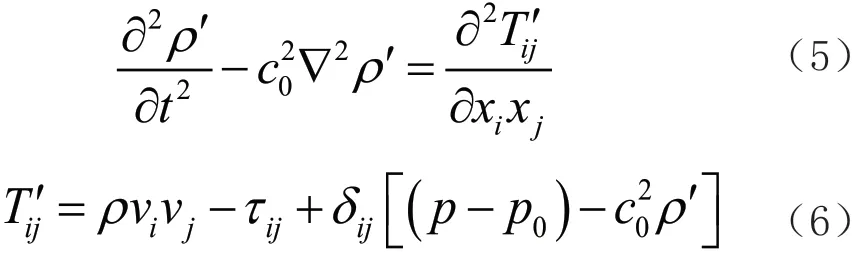

Lighthill声类比方程左端是声波传播项,右端是例如外部激励或流动变化等的声源项。该方程从连续性方程和N-S 方程中分离出声源项,并可将流场结果作为已知条件对声传播项进行求解。
2.2 计算域及边界条件
本文采用商用软件STAR-CCM+进行数值求解。计算域所在坐标系、各尺度和边界条件如图4所示。其中入口和计算域上下表面均为速度入口,由于计算系泊工况,故速度为0;出口为压力出口;计算两侧均为周期面。船尾至出口面为5 倍船长,以让尾迹充分发展。自由液面为静水面,进出口以及侧面边界加入VOF 波阻尼条件,以消除来自边界的波反射。该计算域被分为3 个部分,其中叶轮部分为旋转域,导叶体和船体部分为静止域,采用滑移网格方法来模拟叶轮旋转。

图4 计算域
2.3 网格划分及收敛性验证
网格划分仍基于STAR-CCM+进行,由于叶轮和导叶体区域几何形状复杂,故采用适应性较好的多面体网格来划分;而流场外域几何较为规整,故采用经济性更好的切割体网格来划分。船体和推进器壁面周围均生成边界层网格,自由液面附近、船尾部以及喷口网格局部加密,加密区域随船舶吃水变化而变化,计算域网格及喷泵表面网格如下页图5 所示。

图5 网格示意图

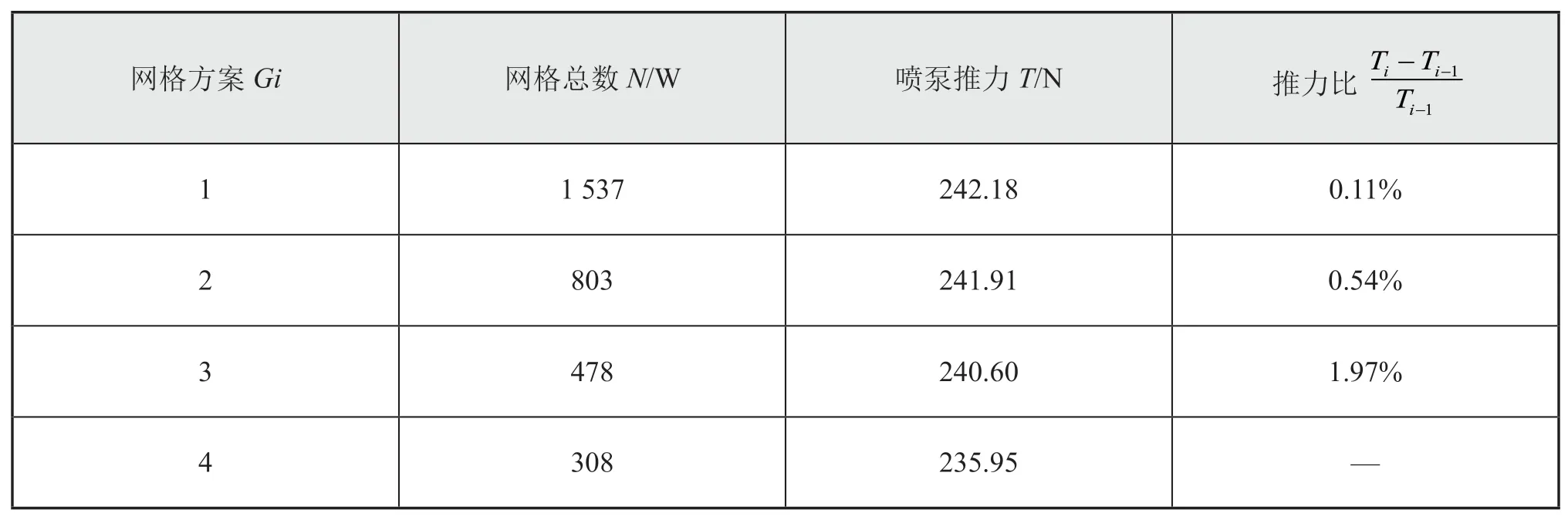
表1 网格收敛性计算结果
3 数值计算结果分析
3.1 喷水推进水动力性能
表2 给出了数值分析得到的不同吃水下深度下喷水推进器的水动力性能参数。由表2 可知,随着浸没深度增加,喷泵流量逐渐变大,而扬程略微变小,总的喷泵效率有所提升,完全浸没喷射时效率比完全水面喷射效率提高约1%。而比较0.3 m 和0.35 m 水线高度可知,当喷口完全浸没在水下时,其效率几乎无变化,即与浸没深度无关。推进泵效率提升的原因在于推进泵运行工况点的改变,即浸没深度增加时,工况点往大流量偏移,较大流量处效率稍高。
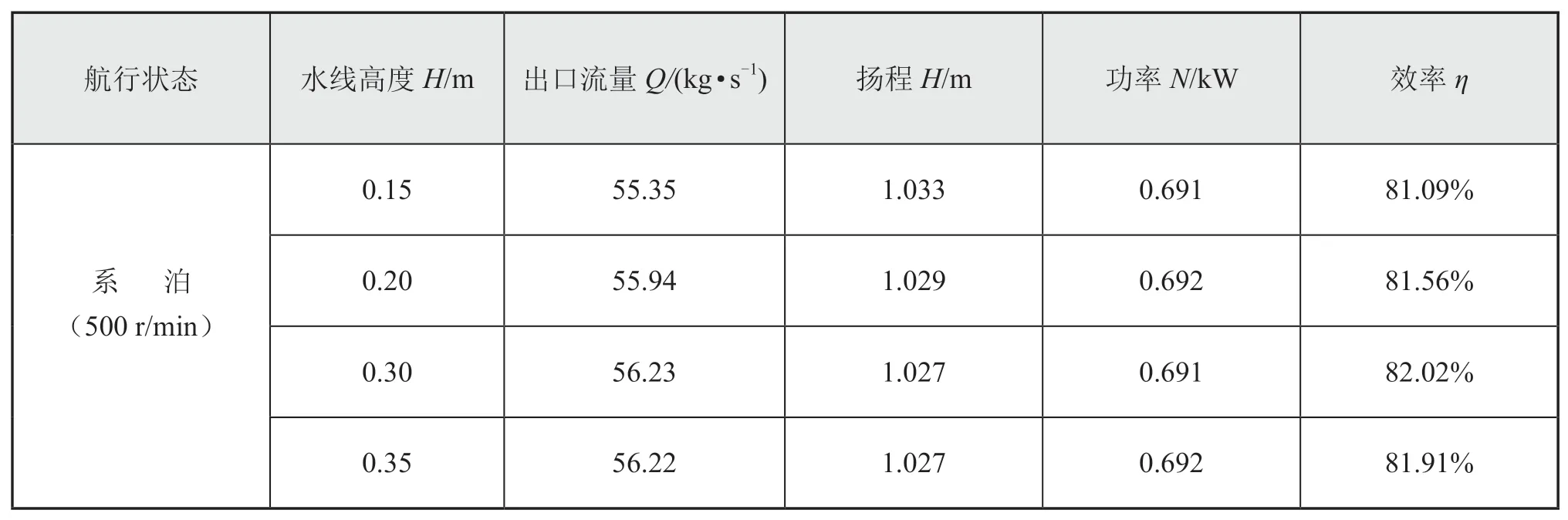
表2 不同吃水状态喷水推进器性能
3.2 喷射流尾迹流场分析
流场中任意一点的速度在湍流状态下是脉动的,因此,这里引入脉动速度相关参数湍动能来表征尾迹场特性,各水线下喷口后湍动能云图如图6 所示。从图6 可以看到,水面喷射时,船后湍动能强度以及影响水体的范围都要大于水下喷射,而流体的湍动能越高,意味着其湍动程度越大,水体因此扰动越剧烈,其能量耗散也越大。同样,比较0.3 m水线和0.35 m水线,其尾迹场中湍动能变化区别不大,即完全浸没时,能量耗散与浸没深度关系不大。

图6 不同吃水状态尾迹场湍动能云图
下页图7 为计算得到的波高等值线图,从中可较清楚地观察到尾迹波系形态。本文算例为系泊工况,船体保持静止,因此无船体开尔文波系,只有喷水推进喷射流产生的尾迹。可以看到,喷水推进器高速旋转产生了巨大冲击力的水柱,在远方一定距离,由于水体张力扩散而呈现与船体兴波尾迹相反的“V 字形”,并且浸没深度越深、扩散距离越远。该扩散的喷射流尾迹应该能够在一定程度上抵消船体本身的尾迹,这也是后续研究的重点,极具科学理论与工程应用价值。比较分析各工况尾迹场可见:随着喷口浸没深度增加,船尾后产生的射流波形明显减弱;至0.35 m 水线时,船后约1 倍船长内已无明显尾迹,说明水下喷射能有效弱化尾迹。
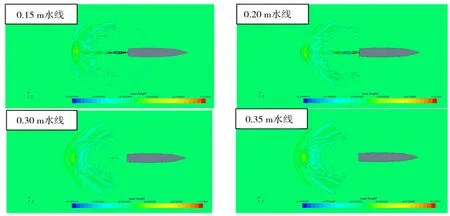
图7 不同吃水状态自由液面波形
为了更加细致比较不同工况的喷射流尾迹波幅,提取船宽方向3 个典型截面=0 m(船体中纵剖面:推进器轴线)、=1 m 和=3 m 处的波高,如下页图8 所示。在中纵剖面处,水面喷射时的尾迹波幅远大于水下喷射,而在离船身较远处则区别不大且波幅很小,=1 m 和=3 m 处不同深度的波幅相近。由此也说明喷射流主要影响喷口后方的流场,而对船两侧远处的流场影响较小。

图8 纵向截面波高对比
3.3 喷射流尾迹噪声研究
在不同浸没状态下流场计算的基础上,开展噪声分析,划定船后方包裹尾迹的半圆柱体为体声源,相同形状、略大于体声源的半圆柱体为传播域,如下页图9 所示,其中噪声计算域坐标系与2.2节中数值计算域相同。传播域向水下和艇后方的表面为无限元表面,根据算法模拟在远场的船舶噪声以保证精度的前提下减少计算量。在船中纵剖面(=0)以及尾迹后方距离液面3 m、5 m、7 m、9 m、11 m、13 m、15 m,-90°~0°之间每15°为1 个相位,布置噪声监测点。声学网格采用不同于流场网格的划分方式,对体声源和传播域采用四面体网格划分,单位网格长度小于所需预报频率上限对应波长的1/6 即可。
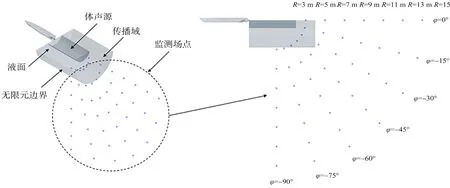
图9 船后尾迹噪声预报计算域和监测点示意图
本文对喷射流尾迹噪声研究关注于0~1 000 Hz频段内每个工况=11 m 处观测点的噪声,如下页图10 所示。在预报频段内,喷射流尾迹噪声频谱曲线未见明显衰减,各工况噪声频谱曲线低谷对应频率相近。观察各工况沿着=-45°方向上的观察点,噪声声源级随着距离增加而降低,且降低速度随着距离增加而减缓。对比=11 m 处各方向上噪声总声级,沿着水平液面方向的噪声强度小于沿着深度方向的噪声强度,表明噪声沿水平液面方向上衰减更快。较低水线工况(0.15 m、0.2 m)噪声总声级小于较高水线工况(0.3 m、0.35 m),和水面喷射耗散较多能量的现象相符。对比两个较高水线工况,0.35 m 水线工况总声级略小于0.3 m 水线工况,表明在水下喷射时,增加浸没深度可以减弱射流噪声。

图10 不同吃水状态R=11 m 处各观测点的噪声声级
4 结 论
本文基于STAR-CCM+软件,结合RANS 方法,针对配置一台混流式推进泵的某高速艇,并通过改变吃水来调节喷水推进喷口浸没深度,研究喷口浸没状态对喷泵性能、喷射流尾迹及其噪声的影响,在国内首次建立了系泊状态下船泵一体数值模拟方法,得到如下结论:
(1)随着浸没深度的增加,推进泵运行工况往大流量偏移,完全浸没后,泵工况点不受浸没深度影响。
(2)水下喷射能够有效地弱化喷口后的尾迹形态,减小波幅,有力于提升船舶的综合隐身性能。
(3)喷水推进形成的喷射流尾迹有可能与船体自身的开尔文波系形成有利干涉,从而降低喷水推进船舶的尾迹特征,具有重要的科学研究与工程应用价值。
(4)不全浸没时,喷射能量部分耗散在空气中,故相较于全浸没喷射,其水下辐射噪声较小;全浸没时,喷射流水下辐射随浸没深度增加而减小。
猜你喜欢
汽车工程学报(2022年5期)2022-10-12
电脑报(2022年24期)2022-07-01
煤气与热力(2022年4期)2022-05-23
科学与财富(2021年33期)2021-05-10
大自然探索(2020年6期)2020-06-19
汽车实用技术(2020年10期)2020-06-11
绿色包装(2019年6期)2019-09-10
饮食科学(2016年7期)2016-07-27
家庭科学·新健康(2014年10期)2014-10-24
现代电子技术(2009年13期)2009-08-31
