
光纤捷联航姿误差分析及应用的研究
2022-07-01 10:42:52何欣周磊
装备维修技术 2022年7期
何欣 周磊
摘 要:本文主要介绍了光纤捷联航姿常见的误差分析,并对误差修正的方法进行简单的论述,重点阐述了机载姿态航向系统上光纤捷联航姿的应用。
关键词:光纤捷联航姿、光纤陀螺、误差分析、温度补偿、滤波方法
1.引言
光纤陀螺与传统的机械陀螺相比,具有结构简单、性能稳定、动态范围宽、瞬时响应、可承受较大过载、价格相对较低、寿命长等优点,受到世界各国厂家和用户的普遍关注,发展迅速。近年来,我国的光纤陀螺技术快速发展,越来越多的姿态设备选用新的光纤陀螺作为主要的姿态部件。目前,中低精度水平上的光纤陀螺已实现了工程化应用。随着光纤陀螺技术的飞速发展,除了更高的精度要求,产品的制作难度及制作成本也越来越低,适用性也愈来愈高,使得基于光纤陀螺的捷联惯性系统的实际应用价值越来越高。
本文针对光纤捷联航姿的内部与外部可能会导致误差的因素进行研究,着力于紧密结合飞机实际应用的需求,对可以提高机载姿态航向系统的精度及稳定性的方法进行阐述。
2.光纤捷联航姿
2.1.光纤捷联航姿的特点
光纤捷联航姿与其他惯性系统相比,具有以下优点:
a.由于光纤捷联航姿的核心部件光纤惯性测量组件,是由三个单轴光纤陀螺和加速度计构成,内部没有运动部件,因此具有寿命长、可靠性高、重量轻等优点;
b.启动时间短,对机械环境的适应性高,动态范围宽,且平均无故障时间长;
c.系统构成和制作工艺相对简单,成本相对较低;
d.光纤捷联航姿因光纤陀螺对环境温度敏感的特性在使用时也存在其特殊之处,例如特意的提高或者降低光纤陀螺对环境的灵敏度可使其用在完全不同的领域。
2.2.机载姿态航向系统的组成及工作原理
姿态航向系统由光纤捷联航姿组件和磁传感器组成,采用光纤速率陀螺和挠性摆式加速度计来感测飞机飞行过程中沿机体三个轴向上的运动角速率和线加速度信号,接收磁传感器感测的两个水平轴向上的地磁信号,经电子线路量化、修正后传输给航姿解算板,进行磁航向、姿态解算。将解算结果、工作状态字、故障字等数字信号通过HB6096、ARINC407接口发送至机上交联设备。
3.误差分析
3.1.姿态航向系统内部产生的误差
為保证姿态航向系统的导航精度,必须减小系统的测量误差,而影响测量误差的原因有很多,就误差本身而言,则可分为非随机误差和随机误差。
3.1.1.详细分析
设W为光纤陀螺组件的输出信号,A为加速度计组件的输出信号,关于误差的计算可以建立两者的关系如下:
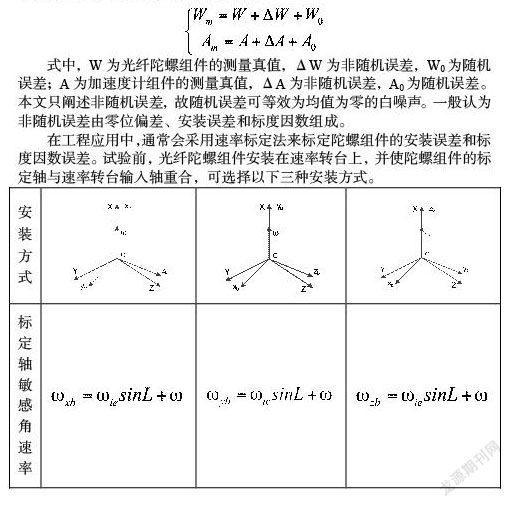
式中,W为光纤陀螺组件的测量真值,ΔW为非随机误差,W为随机误差;A为加速度计组件的测量真值,ΔA为非随机误差,A为随机误差。本文只阐述非随机误差,故随机误差可等效为均值为零的白噪声。一般认为非随机误差由零位偏差、安装误差和标度因数组成。
在工程应用中,通常会采用速率标定法来标定陀螺组件的安装误差和标度因数误差。试验前,光纤陀螺组件安装在速率转台上,并使陀螺组件的标定轴与速率转台输入轴重合,可选择以下三种安装方式。
其中,Oxyz表示机体坐标系,OXYZ表示速率转台坐标系,OX为速率转台输入轴,图像分别为地球自转角速度和转台输入角速率,L为当地纬度。
通过相关计算公式即可算出安装误差和标定误差。对于光纤陀螺机构,零位偏差具有特殊性,具体表现为,温度会引起光纤陀螺组件零偏的变化。
3.1.2.分析结果及措施
通过对光纤系统内部产生的误差进行分析可得到以下结论:
a.光纤陀螺的精度首先取决于硬件的制造水平,包含材料、工艺及原理上的改进;
b.在目前的硬件及制造工艺的限制下,误差补偿是提高光纤陀螺精度的最有效的途径,为误差补偿的关键必须准确的取得误差的参数值,所以试验台的好坏及试验流程的规范度,严重的影响了产品出厂前的精度保持;
c.误差补偿的核心为软件算法,通过更全面数学模型、最优化的计算方法来得到更精准的误差补偿,例如在发现温度对光纤陀螺有影响后,除了通过对光纤陀螺进行全状态温度补偿的同时,又加入了对加速度计的温度补偿,对软件算法的进一步优化,使得光纤陀螺的精度进一步提高;
d.及时装订正确的纬度信息也可降低系统误差。
3.2.姿态航向系统外部产生的误差
姿态航向系统在机上的安装,与机上其他设备的交联及机上的标定工作,都直接影响了姿态航向系统的精度和稳定性。
3.2.1.详细分析
3.2.1.1.姿态航向系统在机上的安装误差
根据机上的安装位置不同,安装精度参差不齐,例如在机身中部设备舱中安装,在机身架水平的情况下,正常安装只能保证大致的航向,较准的俯仰角,较准的横滚角。而安装在驾驶舱中,在机身架水平的情况下,通过激光跟踪仪,正常安装就能保证较准的航向,较准的俯仰角,较准的横滚角。
3.2.1.2.姿态航向系统与机上交联设备之间产生的误差
a.交联信号受到干扰
干扰来源可分为两类:
① 设备本身受到机上电磁环境的影响
② 通过机上线缆引入的噪声干扰
b.系统配套的磁传感器安装误差及传感器本身的误差所带来的误差
光纤捷联航姿组件工作在磁航向模式时,通过磁传感器感应的地磁方向来修正陀螺航向,将修正后的信号作为光纤捷联航姿组件输出的磁航向,因此,当引入磁传感器安装误差时,会导致姿态航向系统输出的磁航向存在误差。
3.2.2.分析结果及措施
通过对姿态航向系统与机上交联设备之间产生的误差进行分析可得到以下结论:
a.针对在机上安装所产生的误差是不可避免的,一般工程应用中都可以通过飞机架水平时,对姿态航向系统进行初始的安装误差装订,利用外部基准使陀螺部件给出自己的安装误差,既降低了工作难度,又提高了工作效率及安装误差标定的准确度。
b.针对机上高密度的电磁环境对光纤陀螺及线缆的影响,使得数据采集及信号输出时都会伴随大的干扰,导致信号不稳,精度降低,一般对应的处理方法则是使用滤波电路及滤波算法,合理的增加滤波电路及滤波算法可有效的解决外部带来的干扰噪声问题。一般机上电缆的处置为使用屏蔽线缆、屏蔽电连接器以及电缆收头处进行屏蔽处理。
c.针对机上磁传感器的本身误差、安装误差,通过罗差校正的方法去修正误差。
d.针对飞机在飞行过程中因纬度变化产生的误差,一般可通过手动或自动的方式及时装订纬度信息来修正误差,因为姿态航向系统为独立的系统,所以只能通过手动的方式来装订即时纬度信息,具体为通过飞行前纬度修正及飞行中纬度修正。
4.总结及展望
随着光纤陀螺的实用化技术走向成熟,由光纤陀螺构成的捷联惯性系统在军用和民用领域都得到了广泛应用,本文简述了光纤陀螺的特点及发展前景,并结合机载姿态航向系统对光纤陀螺在使用中的误差进行分析讨论,并找出合理可行的减少误差的方法。
总之,本文的工程实践特色较为明显,算法研究与实际应用相结合,为今后以光纤陀螺作为主要姿态导航部件的使用提供了重要的参考价值,同时为今后实际应用中遇到的误差问题提供了合理可行的排除方法。
猜你喜欢
物联网技术(2016年12期)2017-01-21 21:37:11
物联网技术(2016年11期)2017-01-12 19:27:09
现代商贸工业(2016年9期)2017-01-07 11:32:00
科学家(2016年3期)2016-12-30 00:09:18
物理教学探讨(2016年11期)2016-12-19 21:55:19
中国科技博览(2016年21期)2016-11-14 10:20:27
科学与财富(2016年28期)2016-10-14 18:47:08
中国科技博览(2016年15期)2016-08-23 20:16:20
中国科技博览(2016年13期)2016-07-13 02:48:41
中国科技博览(2016年11期)2016-05-06 20:41:12
