舰载平面相控阵天线安装倾角的设计方法*
2022-06-28 06:53梁宇宏何海丹侯禄平
电讯技术 2022年6期
梁宇宏,何海丹,张 云,温 剑,侯禄平
(中国西南电子技术研究所,成都 610036)
0 引 言
相控阵天线具有波束灵活可控以及快速捷变的能力,并且便于多功能集成,在通信、雷达等领域已经获得了广泛的应用[1-2]。对于舰载平台,将一体化的射频系统与舰上层建筑(或桅杆)综合集成共外形于一体,能解决水面舰艇天线拥挤、隐身性和电磁兼容性差的问题,从而可有效提升舰艇的作战能力。射频一体化的核心是天线集成技术,平面相控阵天线是射频一体化系统的最佳选择[3-4]。相控阵天线通常与舰船桅杆共形安装、一体化设计[5]。为了实现方位360°范围内的扫描覆盖,通常需要3个以上的天线阵面[6]。同时,为了使相控阵天线具备更好的空域覆盖特性,每个天线阵面均有一定的安装倾角。一般地,相控阵天线的电气性能随着扫描角度的增大而恶化,天线主波束偏离阵面法向的扫描角越大,则增益下降越大。因此,在满足覆盖空域的前提下,尽可能减小相控阵天线的最大扫描角度就变得尤为重要。为降低因扫描角增大而导致的天线性能下降,使相控阵天线最大扫描角最小是阵面安装倾角设计目标之一。舰载相控阵天线依据不同的功能需求,有不同的空域覆盖范围。当相控阵天线的安装平台处于运动姿态条件下,如舰船在航行过程中遇到航向改变、纵摇和横摇,对于相控阵天线特定的覆盖空域,不同的安装倾角就会导致最大扫描角的变化。同时由于舰船自身的船体特性与航行区域均有区别,其摇摆的程度也不相同。
目前,多篇文献对相控阵天线处于静止平台条件下的安装倾角开展了研究。文献[7]报道了半球空域覆盖条件下的最佳阵面安装倾角的计算方法。此时,各天线阵面最大扫描角相等,同时数值也最小,但该文献仅对半球空域覆盖条件下的静止平台的安装倾角进行了分析。文献[8-9]报道了相控阵天线对覆盖空域的最佳安装倾角的设计方法,但也仅对相控阵天线处于静止平台条件下的安装倾角进行了分析。
当相控阵天线的安装平台处于运动姿态条件下,就需要通过调整扫描角对相控阵天线的波束指向进行修正。利用舰载惯导系统提供的纵摇和横摇信号,电子稳定平台通过计算相控阵天线波束指向角来补偿由于舰船姿态变化产生的波束指向偏差。目前已有多篇文献讨论了电子稳定平台的补偿方法[10-12],推导出了舰船电子稳定补偿公式及天线波束指向对应的方位角与俯仰角。现有文献均集中于描述相控阵天线舰船电子稳定补偿方法,未能对运动姿态条件下的相控阵天线阵面的安装倾角进行分析。
本文对处于静态和动态姿态下的舰载平面相控阵天线的波束指向变换进行了分析,得到了平面相控阵天线的扫描角。在此基础上,以相控阵天线最大扫描角度最小为目标,给出了天线随舰载安装平台处于运动姿态条件时的最佳安装倾角的设计方法。
1 舰载相控阵天线指向变换分析
1.1 坐标系定义
令O-XYZ为舰船地理坐标系,OX轴平行于水平面指向正东,OY轴平行于水平面指向正北,OZ轴垂直于OXY平面,铅锤向上为正。
令O-XbYbZb为舰船甲板坐标系,OYb轴平行于艏艉线指向舰艏为正,OXb轴与OYb轴平行于甲板平面指向右舷为正,OZb轴与OXb、OYb构成右手直角坐标系。
令O-XdYdZd为相控阵天线阵面坐标系,OXd轴为阵面法向,OYd轴平行于阵面垂直于OXd轴,向右为正,OZd轴与OXd、OYd构成右手直角坐标系。
1.2 舰船地理坐标系至天线阵面坐标系的变换
舰载相控阵天线一般采用俯仰角θ和方位角φ来控制波束指向,而俯仰角和方位角是针对平面相控阵天线阵面坐标系而言的。同时舰船航行也会引起舰船的摇摆,因此需要计算得到相控阵天线在阵面坐标系的波束指向控制角,使得天线波束指向目标。
为了实现方位360°范围内的扫描覆盖,将至少需要3个天线阵面。典型的舰载相控阵天线阵面的数量为4个,其安装布局俯视示意图如图1所示,其中斜线覆盖区域为相控阵天线,A0为1号阵面起始角。

图1 典型舰载4面相控阵天线安装布局俯视图
(1)
选取一面相控阵天线进行分析,其安装于舰船桅面上的示意图如图2所示,斜线覆盖区域为相控阵天线阵面,天线阵面安装倾角为θ0。

图2 安装于桅面上的平面相控阵天线
将O-XbYbZb坐标系绕OYb轴旋转角度θ0,旋转为O-X′Y′Z′坐标系,把平面相控阵天线布置在Y′OZ′面上,得到天线阵面安装倾角变换矩阵Ma为
(2)
水面舰船在海上航行中,受风浪影响而产生摇摆,包括纵摇、横摇、垂荡及航向改变,其中纵摇、横摇和航向改变对相控阵天线的影响最大。
舰船航向变换如图3所示,O-XYZ坐标系绕OZ轴旋转角度H后的坐标系为O-XhYhZh。
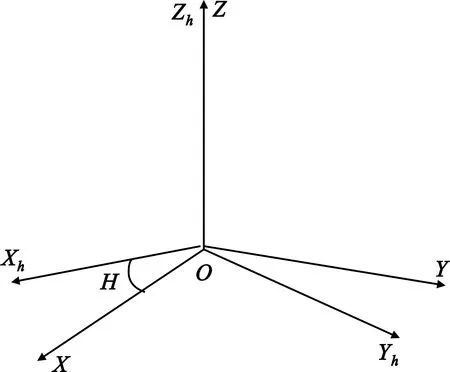
图3 航向变换示意图
航向变换矩阵Mh为
(3)
舰船纵摇变换如图4所示,O-XYZ坐标系绕OX轴旋转角度P后的坐标系为O-XpYpZp。

图4 纵摇变换示意图
纵摇变换矩阵Mp可以表示为
(4)
舰船横摇变换如图5所示,O-XYZ坐标系绕OY轴旋转角度R后的坐标系为O-XrYrZr。
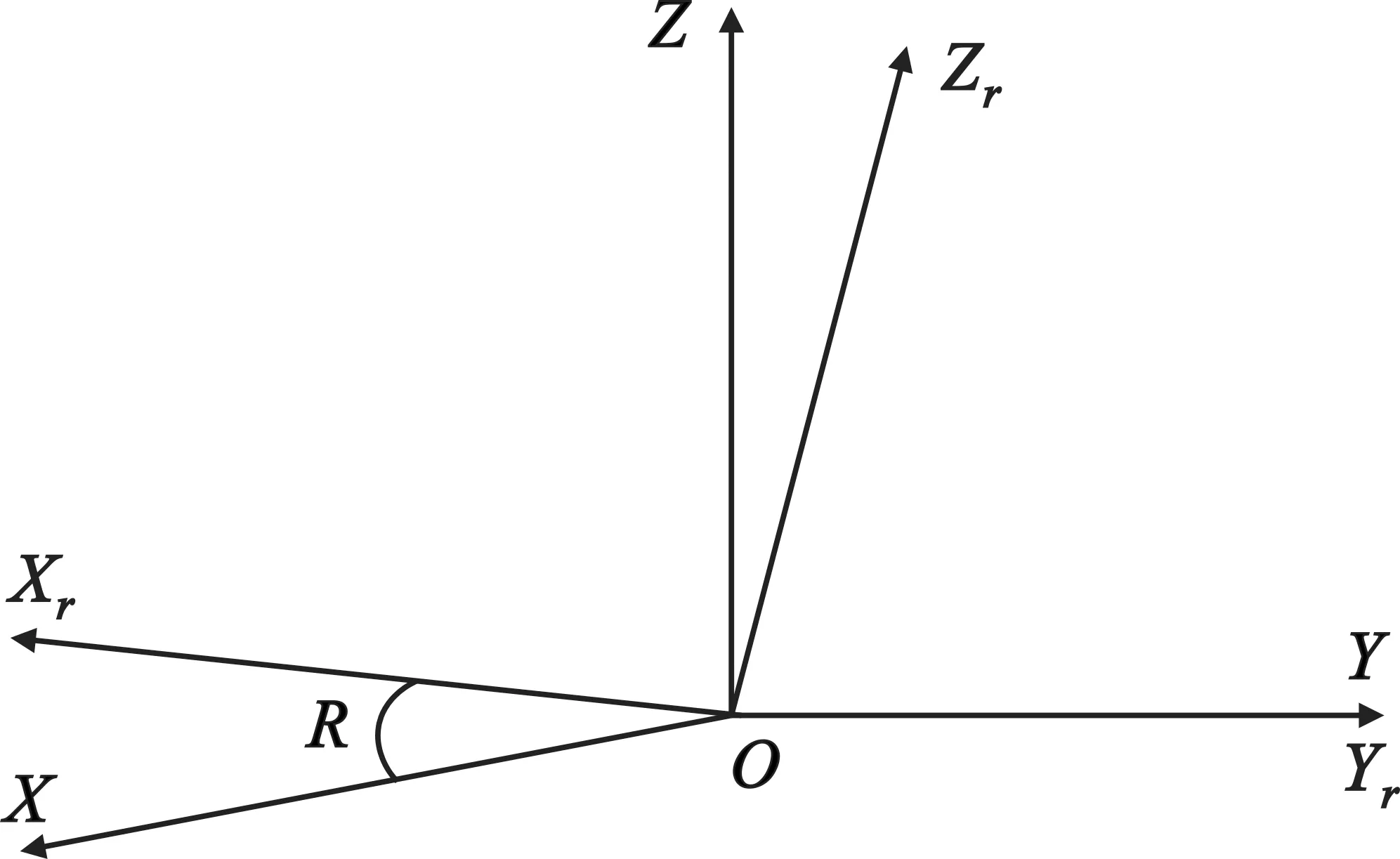
图5 横摇变换示意图
横摇变换矩阵Mr可以表示为
(5)
考虑天线在舰船上的旋转布阵以及天线的倾斜安装后,当舰船发生航向变化、纵摇、横摇时,第i面相控阵天线的变换矩阵Md_i表示为
Md_i=Mr·Mp·Mh·Ma·Mh_i。
(6)
1.3 相控阵天线波束指向变换分析
目标在舰船地理坐标系O-XYZ中可以用俯仰角θ和方位角φ来表示。令俯仰角θ的取值范围为[θL,θH],方位角φ的取值范围为[φL,φH],由此计算得到方位面覆盖范围C=φH-φL。
目标A在舰船地理坐标系中的示意图如图6所示。
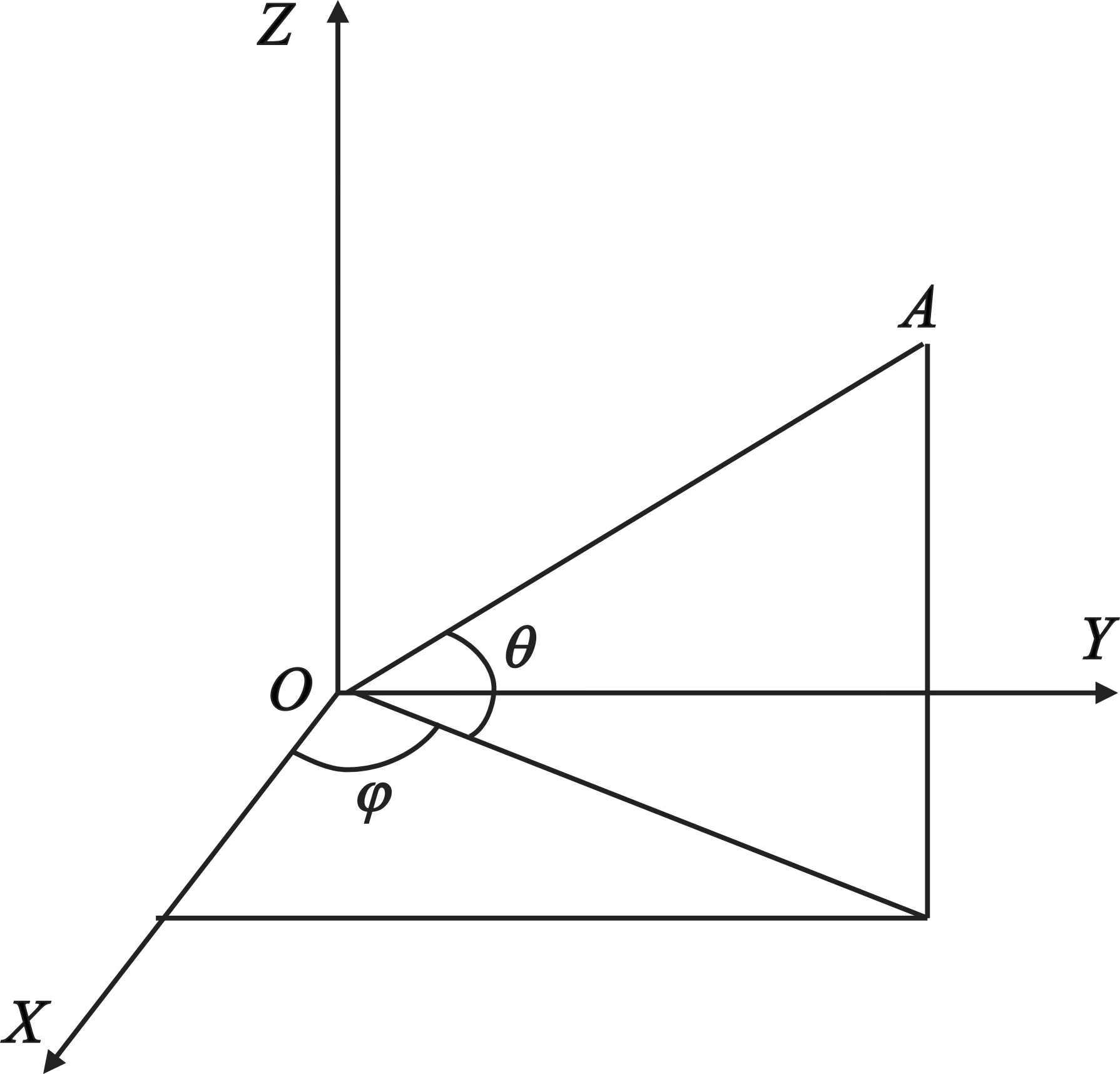
图6 目标在O-XYZ坐标系中的示意图
目标A在舰船地理坐标系中的单位向量坐标(x,y,z)可表示为
(7)
目标A在相控阵天线阵面坐标系中的示意图如图7所示。

图7 目标在O-XdYdZd坐标系中的示意图
将计算得到的目标A转换至平面相控阵天线阵面坐标系O-XdYdZd的坐标(xd,yd,zd):
(8)
令目标A在天线阵面坐标系中的俯仰角为θd,在天线阵面坐标系中的方位角为φd,根据几何关系可以得到
(9)
由式(9)可以分别计算得到目标A在天线阵面坐标系下的俯仰角θd和方位角φd。
2 舰载相控阵天线安装倾角的分析与设计
2.1 平面相控阵天线安装倾角的分析
如图8所示,在天线阵面坐标系O-XdYdZd中,将平面相控阵天线布置在YdOZd面上,矩形覆盖区域为平面相控阵天线阵面,平面相控阵天线的法向波束指向为+Xd轴,天线波束为圆锥扫描,则平面相控阵天线扫描角α可以表示为
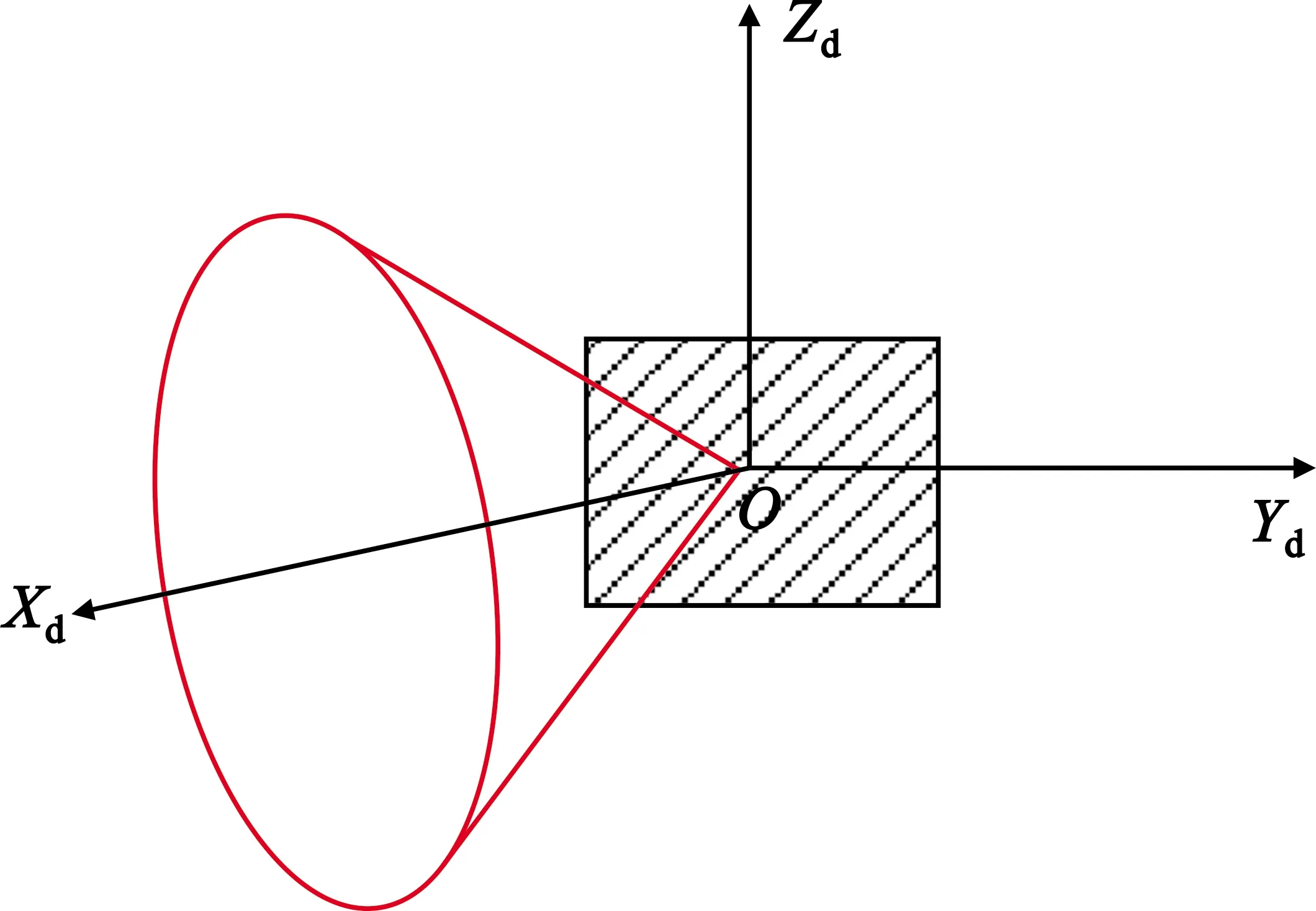
图8 平面相控阵天线扫描区域示意图
α=arccos(cos(θd)·cos(φd)) 。
(10)
因此只要计算出θd和φd的值就能得到天线的扫描角α。αm为平面相控阵天线在扫描区域内最大的扫描角。对于平面相控阵天线,天线的最大扫描角αm越小,天线性能越好。
已知天线数目为N,方位面覆盖范围C,阵面起始角为A0,据此可以计算相控阵天线阵面在舰船甲板坐标系O-XbYbZb中的方位面的旋转角H1_i。根据舰船自身的船体特性与航行区域,可以得到纵摇与横摇的角度范围,令纵摇角P的取值范围为[PL,PH],横摇角R的取值范围为[RL,RH]。相控阵天线需求的俯仰角θ的取值范围为[θL,θH],方位角φ的取值范围为[φL,φH]。平面相控阵天线安装倾角θ0的取值范围为[0,θ0H]
根据上面的分析,对于任一安装倾角θ0,当已知相控阵天线阵面在舰船甲板坐标系O-XbYbZb中的方位面的旋转角H1_i、横摇角R、纵摇角P、航向角H、目标在舰船地理坐标系下的俯仰角θ和方位角φ后,可以得到相控阵天线的扫描控制角(θd,φd),从而根据式(10)得到平面相控阵天线的扫描角α,即平面相控阵天线的扫描角α能够由甲板坐标系下的天线阵面安装倾角θ0、天线布阵旋转角H1_i、横摇角R、纵摇角P、航向角H、目标在舰船地理坐标系下的俯仰角θ和方位角φ唯一确定。由此平面相控阵天线的扫描角α可表示为天线阵面安装倾角θ0、天线布阵旋转角H1_i、横摇角R、纵摇角P、航向角H、目标在舰船地理坐标系下的俯仰角θ和方位角φ的函数,其对应法则记为f,即
α=f(θ0,H1_i,R,P,H,θ,φ) 。
(11)
在确定天线布阵旋转角H1_i,以及横摇角R、纵摇角P、航向角H、目标在舰船地理坐标系下的俯仰角θ和方位角φ的取值范围后,对于特定的θ0,平面相控阵的最大扫描角αm(θ0)可以表示为
αm(θ0)=max(f(θ0,H1_i,R,P,H,θ,φ)) 。
(12)
平面相控阵天线安装倾角θ0在[0,θ0H]的取值范围内,当使得θ0=θ0m时,有αm(θ0m)=min(αm(θ0))。此时,即当天线阵面在舰船上的安装倾角为θ0m时,对于需求的空域覆盖范围和运动姿态条件,平面相控阵天线有最小的最大扫描角。
2.2 设计实例
2.2.1 静止姿态状态的安装倾角设计
当纵摇角P、横摇角R和航向角H均为0时,舰船处于静止状态。因此,舰船的静止状态仅是运动状态的一个特例,此状态等同于天线安装于地面平台的状态。
以典型的四面相控阵天线为例对静止姿态状态的安装倾角进行设计说明。若需要若相控阵天线扫描波束能够覆盖从水平面仰角5°以上的整个上半空域,即θ取值范围为[5°,90°],φ取值范围为[-180°,180°],此时C=360°。令1号阵面起始角A0=0°,四面平面相控阵在方位向均匀旋转布阵,则天线布阵旋转角分别为0°、90°、180°、270°。由于θ和φ的范围值已知,对于不同的安装倾角θ0,当使得相控阵天线的最大扫描角αm最小时,此时θ0为最佳安装的倾角。
令相控阵天线阵面安装倾角θ0的取值范围为[0°,80°],倾角θ0的计算步进角度为0.5°,依据式(12)进行计算,不同安装倾角θ0与最大扫描角αm的对应关系如图9所示。

图9 静止姿态状态下扫描角αm与安装倾角θ0的关系
从图9可见,当阵面安装倾角θ0=37.5°,对应的相控阵天线的最大扫描角αm最小。此时,最佳安装倾角θ0=37.5°,相控阵天线的法向与天顶方向夹角为52.5°,最大扫描角αm=52.5°。
图10给出了平面相控阵天线在舰船桅杆的安装布局侧视示意图,其中斜线覆盖区域为相控阵天线阵面。

图10 平面相控阵天线的安装布局侧视图
四个平面相控阵天线将上半球空域分成4个球面三角形区域,每个天线覆盖一个球面三角形区域。图11给出了其中一个相控阵天线对的覆盖空域的情况,即图中的红色粗线所包围的区域。
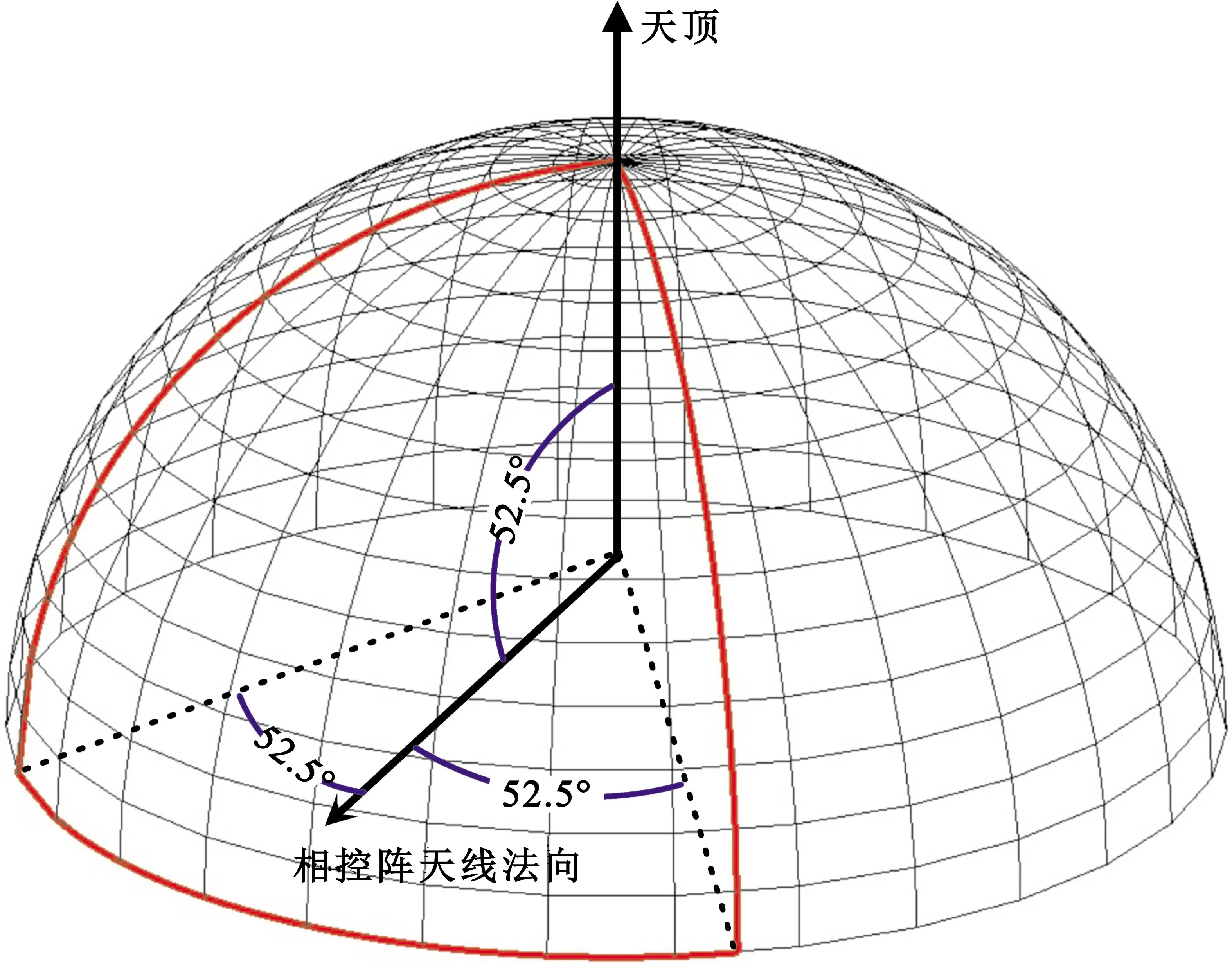
图11 相控阵天线空域扫描覆盖示意图
2.2.2 运动姿态状态的安装倾角设计
舰船在航行过程中不可避免地遇到航向改变、纵摇和横摇等姿态改变的情况。同样,以典型的四面舰载相控阵天线为例对运动姿态状态的安装倾角进行设计说明。若需要扫描波束能够覆盖从水平面仰角5°~50°的空域,即θ取值范围为[5°,50°],φ取值范围为[-180°,180°],此时C=360°。考虑舰船纵摇角P取值范围为[-10°,10°],舰船横摇角R取值范围为[-10°,10°]。由于四面天线共同覆盖方位面360°,因此航向改变不会对天线的最大扫描角产生影响,设置航向角H=0°。
令1号阵面起始角A0=0°,四面平面相控阵在方位向均匀旋转布阵,则天线布阵旋转角分别为0°、90°、180°、270°。由于θ和φ的范围值已知,对于不同的安装倾角θ0,当使得相控阵天线的最大扫描角αm最小时,此时θ0为最佳安装的倾角。
令相控阵天线阵面安装倾角θ0的取值范围为[0°,50°],倾角θ0的计算步进角度为0.5°,依据式(12)进行计算,不同安装倾角θ0与最大扫描角αm的对应关系如图12所示。
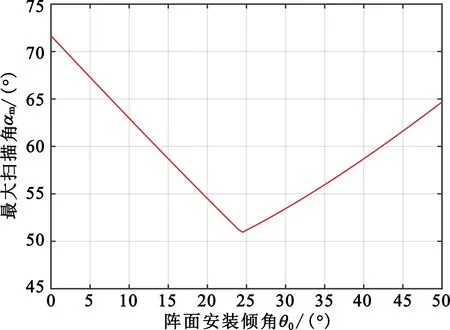
图12 运动姿态状态下扫描角αm与安装倾角θ0的关系
从图12可见,在给定的运动姿态条件下,当阵面安装倾角θ0=24.5°,对应的相控阵天线的最大扫描角αm最小。此时,最佳安装倾角θ0=24.5°,每个相控阵天线的最大扫描角αm=51°。
3 结束语
本文对处于静态和动态姿态下的任意多面旋转布阵的舰载平面相控阵天线指向做了变换分析。以相控阵天线最大扫描角度最小为目标,在给定的舰船纵摇和横摇范围内,针对相控阵天线需求的空域扫描覆盖范围,给出了对舰载平面相控阵天线安装倾角的设计和计算方法。由该方法计算得到的天线安装倾角能够使平面相控阵天线有最小的最大扫描角,从而提高相控阵天线的电气性能。最后以典型的四面旋转布阵安装的舰载平面相控阵天线为例,在需求的空域扫描覆盖范围内对处于静态姿态(等同于地面安装平台)和运动姿态条件下的阵面倾角进行了分析和计算。当然,阵面的安装倾角除了考虑相控阵天线本身的性能外,还需考虑舰载平台的适装性和相控阵天线的隐身性等因素。本文的分析和计算方法对舰载平台平面相控阵天线的安装倾角的分析和确定具有理论指导意义。
猜你喜欢
舰船电子对抗(2022年5期)2022-11-25
电子机械工程(2022年2期)2022-04-25
无线电工程(2022年2期)2022-02-24
煤气与热力(2021年3期)2021-06-09
化工管理(2021年7期)2021-05-13
科技研究·理论版(2021年20期)2021-04-20
舰船电子对抗(2021年1期)2021-04-15
舰船电子对抗(2019年5期)2019-12-04
电子制作(2019年24期)2019-02-23
现代防御技术(2016年1期)2016-06-01