
基于数字微镜器件的高时空分辨选择性光刺激系统
2022-06-28 09:25唐诗瑶闫军帅谢家俊沈炳林余文慧李艳萍胡睿屈军乐刘丽炜
光子学报 2022年5期
唐诗瑶,闫军帅,谢家俊,沈炳林,余文慧,李艳萍,胡睿,屈军乐,刘丽炜
(深圳大学物理与光电工程学院,教育部/广东省光电子器件与系统重点实验室,广东 深圳 518060)
0 引言
光是调控细胞活动的重要工具,相比电刺激[1,2]、药物递送[3]等传统的微观调控方法,光调控具有侵入性小、靶向性好以及易与多种成像手段结合的优点,目前已广泛应用于生物医学领域[4,5]。光刺激系统是进行光调控的重要工具,通过对光波进行调制以对目标区域实现稳定的光刺激[6]。为了能够以细胞尺度对生命活动进行精准调控,科学家们发展了各种高分辨光刺激系统[7-10]。
BOYDEN ES 最初使用宽场照明的方式对神经元进行光刺激,但这种方式空间靶向性较差,只能对体外细胞进行大面积刺激[11]。随后,ZHANG Feng 等开发了基于光纤的光刺激系统,并对开颅小鼠的神经元进行光刺激,将光遗传拓展到了活体层面[12],但由于光纤模式单一、位置固定,难以对特定区域的神经元进行选择性刺激。为了能够对特定区域的细胞进行精准的靶向刺激,科学家们结合不同扫描器件发展了多种高分辨空间选择性光刺激系统。扫描振镜能够将分辨率仅受衍射限制的光斑对准视场范围内的目标区域,结合其进行光刺激具有光利用率高以及空间分辨率高的优势,但由于其扫描方式固定,无法对更加复杂的单个或多个感兴趣区域(Region of interest,ROI)进行选择性光刺激。利用数字微镜器件(Digital Micromirror Device,DMD)进行投影式光刺激(即扫描面和DMD 共轭)能够实现更为复杂的选择性光刺激,DMD 由上百万个可独立控制的微反射镜组成,单个反射镜仅具有“开”“关”两种模式,打开微镜的数量与其在阵列中位置决定了光刺激图案在视场内的大小与位置[13-15]。由于每次照明只利用到了处于“开”状态的少数微镜所反射的光,因此其光能利用率较低,使用过少的微镜提高投影图案的空间分辨率可能会使到达样品面的光功率不够,难以实现有效的光刺激[14]。利用DMD 或液晶空间光调制器(Liquid Crystal Spatial Light Modulator,LC-SLM)将光进行全息投射,将光的能量重新分布,在实现空间选择性与高空间分辨率光刺激的同时,大大提升了光能利用率,使科学家能够将需要高激发功率的光刺激技术——例如双光子激发——运用在神经环路的研究中[16,17]。以全息投射为照明方式的光刺激主要分为两种:加载静态图像对视场进行区域性光刺激和加载高分辨光斑对视场进行动态扫描光刺激。前者利用G-S 算法[18]等优化迭代算法获得视场中目标区域的全息图并将其加载到空间光调制器上[19,20],光依次经过空间光调制器与物镜对视场内目标区域进行光刺激,但反馈算法用时较长导致这种方法时间分辨率较低。在区域性光刺激的基础上,逐点扫描光刺激进一步将目标区域划分为像素点,提高了光刺激的空间分辨率,无需复杂的迭代算法使光能够以任何时序对目标区域进行刺激。
本文构建了一种基于DMD 的选择性光刺激系统,利用DMD 加载由计算全息得到的二维达曼光栅,使光通过达曼光栅与物镜后能够对视场内二维样品面进行选择性逐点光刺激。实验证明,系统不仅能够以不同轨迹(如方形点阵、圆、螺旋线等)对全视场进行逐点的二维扫描,还能够选取ROI 以自定义路径进行逐点扫描。该系统最大的扫描视场为400 μm,最小的扫描步长为0.204 μm,单个光斑峰值半高宽最小为1.5 μm,扫描速度高达10 kHz。该系统适合运用于需要对样品的ROI 进行实时并精准光刺激的实验当中。
1 工作原理
在所构建的光刺激系统中,为了对感兴趣区域进行选择性逐点光刺激,在DMD 上加载通过计算全息生成的结构变化的二维达曼光栅,光通过DMD 可在二维方向上对目标区域进行逐点光刺激。
1.1 达曼光栅的扫描原理
达曼光栅是一种能够使入射光在其远场傅里叶变换面高效地转换成均匀光强点阵的二值相位光栅,主要分为奇数型达曼光栅和偶数型达曼光栅[21-23]。系统采用的达曼光栅结构为2×2 的偶数型结构,选择其频谱面4 个一级衍射光中的一个作为扫描点,通过改变达曼光栅的转折点位置和周期来控制-1 级和0 级衍射之间的分离距离(或角度),实现二维方向的选择性逐点扫描。其中每一张达曼光栅图对应一个扫描点,将结构变化的达曼光栅加载到DMD 上,实现基于DMD 的选择性逐点扫描。由达曼光栅原理以及光栅方程可知,一级衍射光位置为

式中,f为达曼光栅后透镜的焦距,λ为光源波长,dDamm为光栅周期,θ为各个分数级次的发散角。当透镜焦距、光源波长固定时,可通过更换光栅周期实现一级衍射光位置的变化。系统中二维方向上选择性逐点扫描的实现的基本流程是:通过计算机获取感兴趣区域对应的位置信息,由计算全息的方法生成感兴趣位置对应的达曼光栅结构,并通过计算机编码来制作不同的全息图,最后通过DMD 实现对目标区域的选择性逐点光刺激。
1.2 系统设计
基于DMD 的时空分辨率选择性逐点光刺激系统原理如图1(f)所示,卤素灯光源通过650/40 nm 带通滤光片发出红光,在加入环形光照明装置后进行环形光照明以实现暗场成像。该高时空分辨率选择性点刺激系统生成扫描点的流程如图1(a),由LabView 完成同步控制及用户界面显示。计算机首先将sCMOS 相机获取的暗场成像进行阈值处理后,计算机生成并储存值为1 的像素坐标,用于计算需要加载在DMD 上的达曼光栅相位图。由于DMD 的工作特性,准直后的473 nm 的激光以24°入射在DMD 芯片表面。DMD 位于傅里叶变换透镜(f=200 mm)的前焦面,其加载的达曼光栅在透镜后焦面产生衍射光斑,然后将孔径可调的方形光阑置于该傅里叶面,滤除零级斑及其余衍射斑,仅保留一个1 级衍射斑作为扫描刺激点(图1(f))。后置的管镜(f=200 mm)与显微物镜(M=20×)组成4f系统,将上述扫描点共轭成像到样品面上用于扫描光刺激,实验证明光刺激的扫描视场最大可达400 μm×400 μm,扫描速度取决于DMD 的更新速度,最大可达10 kHz。

图1 基于DMD 的高时空分辨率逐点光刺激系统的实现原理Fig.1 The principle of selective optical stimulation system with high spatiotemporal resolution based on DMD
2 实验步骤
2.1 系统硬件及搭建步骤
1)光源
为了获得高质量的高斯光束,系统使用购自长春新产业473 nm 的单模光纤耦合的固体激光器,输出的最高功率为40 mW。
2)光路准直
为了对从单模光纤输出的473 nm 激光进行准直和控制,需要在空间滤波器(匠星光电,SF-1T)上安装4 倍(OLYMPUS,NA=0.1)的物镜,以及用于单模光纤耦合的耦合组合件:FC 接口(Thorlabs,SM1FC)及连接FC 接口和空间滤波器的转接环(图1(b))。该光纤耦合方式相比于常规的三轴位移台或光纤耦合方式,在不影响耦合后光斑的质量前提下,成本更低,除了用于光纤耦合时的三维方向的调节,自身底部还带有二维方向的调节器用于垂直于水平面的二维方向的调节。并且可通过更换耦合物镜倍数来改变出射光斑的大小。
3)入射光阑
在准直光进入DMD 前加入圆形光阑,控制圆形孔径光阑大小使入射光斑与DMD 芯片表面正好相切(图1(c))。
4)DMD 入射光调节
由于DMD 在切换镜片状态时是以微反射镜对角线为旋转轴旋转+12°或-12°,为使出射光路垂直于DMD 芯片出射,除了满足入射光路与DMD 芯片表面垂法线夹角24°外,还需要求入射光沿着与单个微反射镜旋转轴垂直的方向入射。
如图1(d),为了满足上述的入射条件,定制了将DMD 转动45°的外部八边形固定装置。利用该固定装置,仅需使入射光与DMD 芯片表面的垂轴夹角24°,出射光线便垂直于DMD 射出,为了使光斑打在DMD 芯片中心上,还需将其底部固定在纳米精度的三轴位移台上(Thorlabs,MBT616D)。
5)DMD 出射光准直
固定DMD 的外部结构并不能保证DMD 芯片表面完全垂直于光学平台,为了让通过DMD 后的调制光的光轴平行于光学平台,在DMD 后加入如图1(d)所示的双反射镜结构,使选择的一级衍射光的中心光轴不仅平行于光学平台,还与光学平台上的其中一排螺孔完全平行。
6)傅里叶变换透镜调节
在准直好一级衍射光斑后,去掉近端光阑,保留远端光阑,加入透镜,使DMD 位于其前焦面以得到达曼光栅的频谱,由于DMD 和扫描透镜中间有两个反射镜,无法直接测量DMD 和透镜之间的距离。可在透镜后引入平行光反向照射,前后移动透镜保证DMD 位于其前焦面。在调节XY方向位置前,应提前确定好轴向距离(光斑尺寸最小处),再慢调透镜XY方向位置,使通过透镜的零级衍射光正好位于远端光阑中心。
7)方形可变光阑
在使用DMD 作为二维光栅对光进行调制时,0 级光斑附近的X轴方向和Y轴方向共有4 个1 级光斑(图1(f)),需要在扫描透镜的后焦面加一个可调节的方形光阑(大恒光电,GCM-5711M)进行滤波,只留下其中一个光斑作为扫描点,利用光功率计测得,所选的光斑相较于入射光斑的能量利用率为1.36%。由于DMD 芯片外部加有旋转45°的装置,从DMD 出射的整体调制光也会旋转45°,因此方形光阑的底部也需要装配将其旋转45°的底座(图1(e))。
8)套筒透镜调节
套筒透镜和方形光阑距离为套筒透镜的焦距,调节套筒透镜轴向位置,使出射的光束为平行光。
9)物镜调节
由于生物实验需要在培养品中进行,故选采用倒置的显微镜结构。将物镜倒置安装在直角镜架(匠星,CM-26-01)上,首先调节直角支架的轴向位置,为保证套筒透镜和物镜形成4f系统,在套筒透镜前引入平行激光沿光轴入射,前后移动直角支架,使物镜后的光束为平行光束,确定好直角支架轴向位置。然后在直角支架上安装两根短的笼式系统支杆,并在支杆上放置荧光对准板(Thorlabs,VRC6SCPT),荧光对准板应贴近直角镜架入光口,调节直角支架XY方向位置,使光斑中心正好置于荧光对准板中心,轻微旋转直角支架上旋钮,使光斑垂直于光学平台射出。
2.2 扫描视场和扫描步长的控制
系统中,经DMD 调制的光束在成像面扫描视场的大小可通过改变光栅周期fx,扫描透镜焦距fscan,套筒透镜焦距ftube,及物镜的焦距fobj来控制。在x轴方向的最大扫描视场可以表示为

式中,Δθ为调制光束通过DMD 后的一阶衍射角,fscan为扫描透镜焦距,fobj为物镜焦距,ftube为套筒透镜焦距,fx为光栅的空间频率且,NTx为在x轴方向上每个光栅周期内所占的DMD 像素数,d为DMD 像素点的尺寸7.6 μm,由于DMD 入射角度为45°,因此实际有效的d的大小为10.75 μm。NTx,min为x轴方向上每个光栅周期内所占的DMD 像素数的最少数,实际上DMD 上相邻像素点一个为“开态”,一个为“关态”,此时每个光栅周期内所占DMD 像素点数最少,即2 个像素点;NTx,max为x轴方向上每个光栅周期内所占的DMD 的最大像素数,默认为∞。y轴方向的最大扫描视场与x轴方向相同。假设扫描透镜焦距fscan=200 mm,套筒透镜焦距ftube=200 mm,物镜焦距fobj=10 mm,波长λ=473 nm,基于DMD 的选择性扫描系统的最大扫描视场为220 μm。
基于DMD 的选择性扫描系统最小扫描间隔由光斑内所占DMD 像素数等参数表示,即

式中,Δfx,min为最小空间频率变化,,n为光斑内所占DMD 的像素数,这里取n=1 080,NTx,min=2,计算出最小步长为0.204 μm。
2.3 扫描视场与成像视场的空间匹配
为了能够对感兴趣区域进行精准光刺激,需要使滤波后的调制光衍射面和显微成像系统视场空间匹配,通过探测器可以实现任意选择空间光刺激模式以满足实际需求。图2 表示在进行刺激视场与成像视场的空间匹配前,通过相机获得的成像视场与刺激光场的空间关系,白色区域代表成像视场,红色虚线范围为扫描视场,两者在空间尺寸,空间位置及角度上均不匹配。

图2 成像视场和扫描视场的空间不匹配示意图Fig.2 Schematic diagram of the spatial mismatch between the imaging field of view and the scanning field of view.
当光路确定后,成像视场的大小和位置也确定了,通过改变扫描光路中一些参数来进行视场匹配。首先确定系统的成像视场大小为400 μm×400 μm,在向程序输入ROI 坐标以及尺寸参数后,通过图像处理可获对应的全息图,使用DMD 加载全息图并在物镜后得到图2 红色虚线中的目标光场。为了使扫描视场也为400 μm×400 μm,将扫描透镜大小更换为300 μm ,套筒透镜大小更换为100 μm,并改变操作数xd,实现400 μm×400 μm 的扫描视场。成像视场大小和扫描视场大小尺寸匹配后,还需使成像视场中心和扫描视场中心重合。在刺激光场经过套筒透镜ftube后和进入物镜前,通过一组双反射镜来准直ftube后的出射光。最后调节相机靶面偏转角,使扫描视场和成像视场完全共定位。
2.4 系统的同步控制
系统中所有的操作由自定义开发的LabVIEW 程序完成。系统的暗场成像主要通过LabVIEW 实时改变成像时相机的参数,显示成像结果及对图像进行保存等。包括改变相机在成像时的分辨率、曝光时间、对比度等,以及保存图片的格式、路径等等。用于图像处理及生成全息图的MATLAB 脚本可嵌入LabVIEW 程序中,实现对图像的像素化处理,边缘检测/阈值处理,ROI 坐标信息转化和全息图生成。LabVIEW 还可控制电动旋转色轮进行自动滤光片切换,以及控制DMD 加载全息图的时序,实现对ROI 的选择性逐点光刺激。
2.5 算法生成达曼光栅
图像处理由MATLAB 实现,为了获取ROI 坐标,首先对图像进行不同程度的像素化处理,一定程度的像素缩放在不影响还原度的情况下减少ROI 的像素点,极大地提高了系统对视场内目标区域的扫描速度。然后对像素化处理后的图像进行二值化处理或边缘检测,最后获取图像处理后ROI 的坐标。
使用MATLAB 生成偶数型二维达曼光栅图,并将其作为全息图加载到DMD 上以得到扫描光斑。偶数点阵达曼光栅结构排除了零级衍射光对制作误差的敏感性,照明均匀性好于奇数阵列照明。在生成全息图时,算法采用了周常河求解2×2 偶数型达曼光栅时的最优数值解0.5[24]。为了在扫描透镜后焦面产生沿x和y轴方向扫描的点,需要通过改变物光场x轴和y轴的相对坐标值(分别表示为xd和yd),从而改变-1 级和0 级衍射光斑之间的分离距离(或角度)来实现。实验中应避免选择过高的xd或yd,因为它们会导致不同级次的衍射光束重叠。
由于DMD 上的反射镜只有“0”和“1”两种状态,只能加载二值全息图,因此需要对获得的相位型光栅进行二值化处理,以获得“0”“1”结构的数字光栅[25]。通过以上步骤获得的达曼光栅是一个二维的方形矩阵,而DMD 上的像素点数是1 920×1 080,为充分利用DMD 像素点数并且使达曼光栅以正常状态加载到DMD(若加载到DMD 上的图片像素点数不是1 920×1 080,DMD 会对图片进行默认缩放)上,在制作达曼光栅时选择的像素点数为1 080×1 080,并在其两边分别加上1 080×420“关态”矩阵,最终生成的DMD 上加载的达曼光栅结构如图3。

图3 加载到DMD 上的全息图Fig.3 The Hologram loaded on DMD
3 实验结果
3.1 扫描视场和单点分辨率
实验使用罗丹明A 指示剂,对扫描路径进行成像,将电动旋转色轮内的滤光片切换为495 nm 长通滤光片。获得的扫描视场大小为400 μm×400 μm(图4(a))。使用光束质量分析仪对单个扫描点的光强进行测量,并对光强采样值进行高斯拟合,获得的单个扫描点的光强峰值半高全宽对应于相机的4 个像素点,每个像素点在实际视场中对应的尺寸为0.325 μm,因此单个光斑的峰值半高宽为1.5 μm。使用不同焦距的扫描透镜,套筒透镜以及物镜可以获得不同范围的扫描视场。
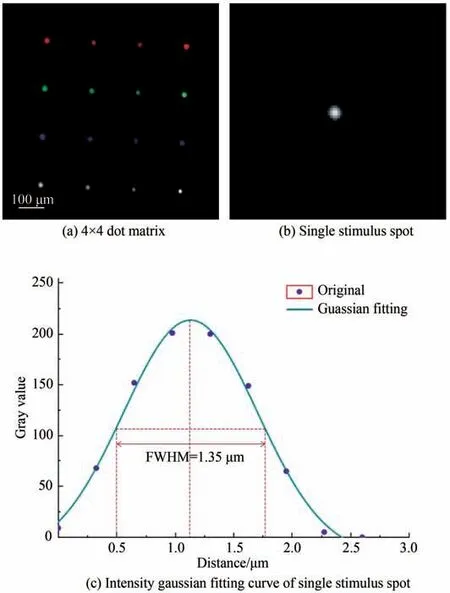
图4 光刺激系统获得最大扫描视场以及单个光斑的分辨率Fig.4 The maximum scanning field of view obtained by the optical stimulation system and the intensity Gaussian fitting curve of single stimulus spot
3.2 不同扫描路径的实现
3.2.1 达曼光栅的固定步长逐点扫描
2×2 偶数型达曼光栅下,利用其x轴-1 和y轴的-1 级的衍射光斑,通过改变光栅周期和相位拐点,可实现固定步长的逐点扫描,包括2×2,4×4 的方形点阵。当特定形状图形的路径坐标代入到物光的坐标信息中时,光通过顺序加载的达曼光栅后可实现对应的路径扫描,如圆、螺旋线、椭圆等(图5)。

图5 不同路径的扫描成像图Fig.5 Scanning imaging diagrams of different paths
3.2.2 达曼光栅的选择性扫描
为验证系统的选择性扫描,将深圳大学的英文缩写“SZU”进行图像处理,全息图生成和加载后,实现了一级衍射光斑沿着“SZU”路径进行扫描。选择的DMD 开态时间为100 μs,相机的曝光时间为100 ms。在相机曝光时间内,相机可捕捉DMD 加载700 张全息图下光的扫描路径(图6(a))。分别手动选取首尾“S”“U”以及“S”“Z”两个字母,在进行阈值化处理和坐标获取后,进行全息图生成和加载,完成了对手动选取ROI 选择性光刺激的验证(图6(e)和(f))。

图6 手动选择ROI 模式下的扫描图Fig.6 Scanning schematic diagram under manual selection of ROI mode
3.3 复杂图案的选择性逐点光刺激
为验证系统对复杂图案的选择性逐点光刺激能力,将深圳大学校徽进行像素化与阈值化处理,坐标获取后,将其转换所得的全息图序列依次加载到DMD 上(图7(c)),设置单个扫描点的驻留时间与相机曝光时间分别设置为100 μs 和1 s,以获取所有光刺激点在曝光时间内的组合图,获得的扫描结果如图7(d)。将电动旋转色轮内的滤光片切换为525 nm 长通滤光片,以相同的步骤在10 倍物镜下,对被荧光素钠染色的卵巢癌细胞进行了复杂图案的跨细胞扫描,结果如图7(e),可以看出在被均匀染色的细胞密集的区域能够成功激发出目标图案。
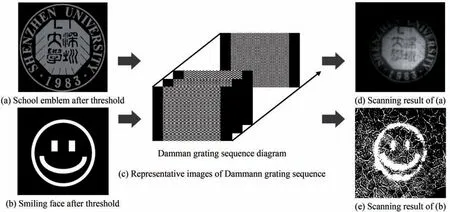
图7 复杂图案的DMD 扫描流程Fig.7 Scanning schematic of complex pattern with DMD
4 结论
本文从计算全息和达曼光栅原理出发,提出了一种基于DMD 的高时空分辨率选择性逐点光刺激方法。在DMD 上加载结构快速变换的达曼光栅,使经过DMD 的刺激光能够在物镜后焦面形成分辨率仅受衍射限制的扫描点,将成像视场与扫描视场进行匹配之后,结合图像处理对成像视场的感兴趣区域进行选择性逐点光刺激。为验证方法的可行性,设计并搭建了基于DMD 的高时空分辨率选择性逐点光刺激系统,完成了该系统功能的实验验证:1)能够对视场以任意扫描方式进行光刺激;2)能够对ROI 区域进行选择性逐点光刺激;3)能够逐点扫描出复杂图案。系统的最大扫描视场为400 μm,最小扫描步长为0.204 μm,单点的扫描速度为10 kHz。本系统适用于需要对样品进行高分辨光刺激或需要对感兴趣区域进行实时刺激的光遗传研究中。例如在线虫和斑马鱼等生物的神经环路研究中,该系统能够对单神经元进行精准光刺激,研究单神经元在整个神经环路中的作用。在本系统的基础上加入电动位移台实时控制生物体的位置还可实现其在自由运动状态下的光遗传研究。在全息投射方面,可在该系统基础上加入G-S 迭代等反馈算法,实现区域性光刺激模式和选择性逐点光刺激的一体化。此外,结合钙成像、双光子成像等技术,还能实时获取更微观的神经元活动信息,将其与动物行为相关联能够对神经环路进行更有效地分析与研究。
猜你喜欢
现代电子技术(2022年9期)2022-05-12
科技视界(2020年8期)2020-05-18
阅读(高年级)(2019年9期)2019-11-15
VOGUE服饰与美容(2019年8期)2019-11-12
阅读与作文(小学高年级版)(2019年8期)2019-10-16
小资CHIC!ELEGANCE(2019年28期)2019-09-12
现代电子技术(2018年18期)2018-09-12
软件导刊(2018年4期)2018-05-15
电脑知识与技术(2018年35期)2018-02-27
科学家(2017年12期)2017-08-10
