CINRAD/CC-D双偏振天气雷达双通道一致性研究
2022-06-25 01:59:42姜方达曲绍君赵雪明巩力源裴建勋
长春工业大学学报 2022年1期
姜方达, 曲绍君, 赵雪明, 巩力源, 裴建勋
(吉林省气象探测保障中心,吉林 长春 130000)
0 引 言
天气雷达作为天气探测和预报的重要技术装备已经历了三个发展阶段:常规模拟天气雷达阶段、数字化天气雷达阶段和多普勒天气雷达阶段[1]。前两者只能探测气象目标的位置和强度等静态信息,由于缺乏获取目标动态信息的能力,很难做出准确的天气预报,而多普勒天气雷达不仅能探测气象目标的静态信息,还能够探测目标的动态信息,如速度、谱宽等,从而得到大气风场和湍流等信息,以提高预报准确度。
2000年开始,美国将布网天气雷达升级为具有偏振功能的雷达,标志着偏振探测技术的成熟[2]。随后,单偏振多普勒天气雷达逐渐发展为双偏振和多偏振,其中双偏振天气雷达技术趋于成熟并得到广泛应用,因此,对双偏振标定方法、精度和稳定性提出了更高的要求。使用双偏振标定技术可以全面检查雷达系统的状态,实时在线校正雷达系统偏差,提高了双偏振雷达数据质量[3]。
文献[4]指出造成双偏振雷达差分反射率因子Zdr误差的主要原因包括双通道隔离度和天线增益等。文献[5]分析了天线系统、接收机和数据处理系统,提出了两通道隔离度对偏振数据的影响,并利用金属球法和微雨滴法对天线两通道的增益进行标定,使用以上方法,文献[6-7]中以提高雷达双通道探测性能为目标对雷达系统差分反射率Zdr进行了测试和标定的研究工作。文献[8]在模拟研究的基础上给出了共极化和交叉极化通道隔离度的求法。文献[9-11]通过对不同极化方式的测量数据分析,得出通道增益是导致差分反射率误差因子产生的主要原因。文献[12-14]通过C波段双偏振天气雷达机内信号源的连续波输出对雷达旋转关节进行检测,结果表明,旋转关节造成的误差由于信号进出的方向不同,对双通道造成的影响也不相同,但对双通道一致性的影响较为固定,可以通过后期处理进行修正。目前,通过硬件工艺可以有效改善双通道增益和隔离度对差分反射率因子的影响,通过以上尝试和探索得出在造成差分反射率测量误差的因素中,双通道的一致性成为最主要原因之一。文中结合长春市气象局CC-D雷达阐述了雷达的工作原理和系统结构,分析了接收、发射和天线通路对双通道一致性的影响,提出双通道一致性校准的原理和方法,检验了双偏振雷达双通道的一致性,对各级台站双偏振雷达技术保障工作具有良好的借鉴意义。
1 影响双通道一致性的因素
CC-D雷达由天馈线分系统、发射分系统、接收分系统、信号处理分系统等9部分组成。接收分系统产生可变频C波段射频激励信号,经发射分系统整形功放送入速调管,输出峰值功率大于250 kW的射频脉冲信号,最后经过功分的水平(H)、垂直(V)两路电磁波信号经天馈系统由天线向空间定向辐射出去;由散射粒子返回的微弱射频回波,经过馈线送往接收分系统做功放和下变频处理得到60 MHz的中频回波信号,经采样处理后的I/Q正交信号送往信号处理分系统;在信号处理分系统中,对I/Q正交信号进行平方律检波、地物杂波对消处理得到反射率数值;通过脉冲对处理(Pulse Pair Processing,PPP)或傅里叶变换处理(Fast Fourier Transform,FFT),从而得到散射粒子的动态信息如差分反射率因子等。通过上述工作过程可见,影响双偏振雷达双通道一致性的因素主要包括天线、接收机、旋转铰链和馈线[15]。
天线对双通道一致性的影响主要取决于方向图的一致性和通道增益的一致性,这些由雷达口径和发射波长及波导长度等出厂设计产生的误差是随机的,在实际测量检测中,无法通过系统配置来订正校准。目前常见的是依靠相控阵天线硬件来实现期望目标,以减小差分反射率误差。信号经过旋转关节时,由于信号进出的方向不同,对双通道造成的影响也不相同,且旋转关节对雷达双通道一致性的影响较为随机,无法通过后期修正补偿。接收机分为H、V两路,要求其拥有一致的灵敏度和相同的动态范围。但实际上由于微波器件插入产生功率损耗、噪声系数不同和连接波导长度不完全匹配,使测得信号和相移长度都会存在差异,进而影响动态曲线的斜率和截距,但这种误差可通过系统订正补偿进行消除。
2 双通道一致性校准方法
CC-D雷达双通道一致性校准主要是对Zdr进行数值校准,采用相对值进行校准,排除由波导和微波器件连接产生的误差及测试过程中信号源、传输电缆等测试设备带来的不可预见误差[16]。可通过遮挡馈源处实现收发通路的一体化标校,但链路越长,产生的不确定误差越多,实际中可分为接收通路一致性校准(Receive Consistency Calibration,RCC);发射通路一致性校准(Transmit Consistency Calibration,TCC);天线支路一致性校准(Antenna Consistency Calibration,ACC)。
系统总误差可表示为
ESYS=ERCC+ETCC+EACC。
(1)
2.1 收发通路一致性校准
接收通道测量框图如图1所示。
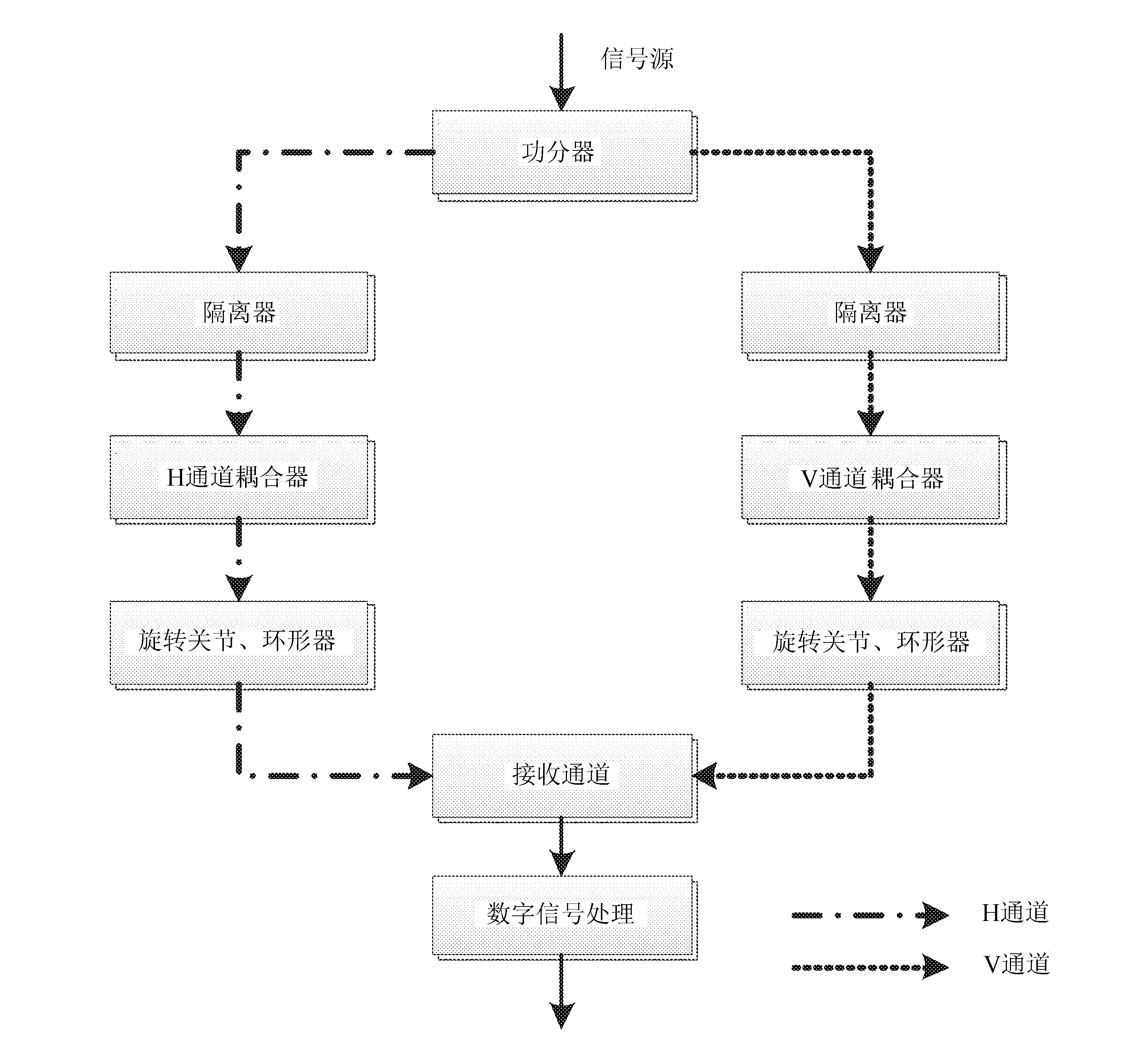
图1 接收通道测量框图
图1中,使用信号源注入幅度适当信号Si,信号幅度可通过估算损耗尽量选取在动态区间范围内输入。测试信号经过功分器、隔离器、定向耦合器、旋转关节和环形器后,由接收支路返回中频数字信号处理,得出H、V两通道的幅度值PRH、PRV,则接收通路一致性误差可表示为
ERCC=(PRH-PRV)+(SRH-SRV)+
(CH-CV),
(2)
式中:PRH、PRV——终端显示功率数值;
SRH、SRV——信号源经过功分后进入H、V通道的信号;
CH、CV——对应耦合度。
发射通路一致性校准过程与接收通路类似,经测量可得发射通路一致性误差为
ETCC=(PTH-PTV)+(STH-STV)+
(CH-CV),
(3)
式中:PTH、PTV——终端显示功率数值;
STH、STV——信号源经过功分后进入H、V通道的信号;
CH、CV——对应耦合度。
2.2 天线支路一致性校准
天线支路测量框图如图2所示。
图2中,由馈源接收射频信号源发出的信号Si,信号源按照雷达工作参数设置频率和幅度,经过相移器、耦合器、旋转关节和环形器后进入接收机或恒温接收机中,经数字中频信号处理后在终端显示,得出两个支路的幅度值分别记为PAH、PAV,也可使用太阳法进行测量比较,则天线支路一致性误差可表示为
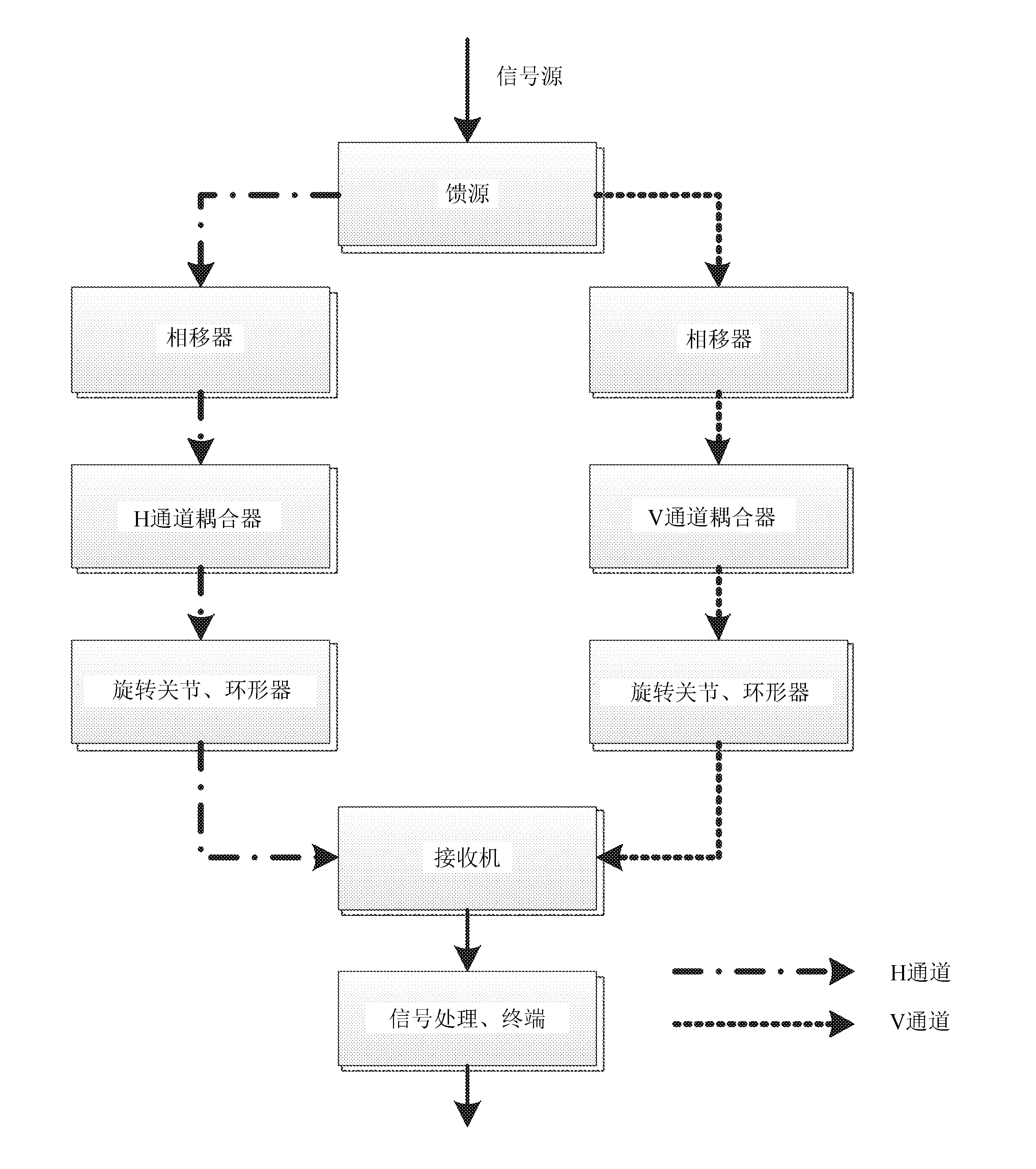
图2 天线支路测量框图
EACC=(PAH-PAV)+(SAH-SAV)+
(CH-CV),
(4)
式中:PAH、PAV——终端显示功率数值;
SAH、SAV——H、V通道中的信号;
CH、CV——对应耦合度。
综上所述,系统一致性误差主要产生在收发通路和天线支路。由于差分发射率因子Zdr是电磁波信号由散射粒子返回的动态信息量求得的差分量,因此接收通道一致性的检测尤为重要,在实际中,我们要求双通道幅度差≤0.2 dB,即Zdr的误差应≤0.2 dB[17]。
3 双通道一致性检验
CC-D雷达是新一代天气雷达CINRAD/CC升级换代产品,主要布设在吉林、黑龙江、云南、新疆等省区,CC-D雷达在CC雷达基础上,在关键点参数采集、自动标校、接收数据处理、状态信息上传等方面做了全面技术升级,最重要的是增加双线偏振功能,可对降水粒子的物理相态做准确判断,适用于冰雹、冰晶、雪片等回波识别。
采用文中方法对长春市CC-D雷达双通道一致性进行检验,使用仪器见表1。

表1 仪器及型号
在窄脉宽条件下,利用机外信号源和机内信号源注入测试信号的H、V通道机外和机内特性曲线如图3所示。

(a)H通道机外运动曲线
由图3可以看出,H和V通道的下拐点分别为107.8 dB和107.9 dB,即最小可测功率信号,双通道特性曲线斜率均为1.004,动态范围均≥85,在动态范围内任取测试点外接信号源进行测量,可得信号源注入相同功率对应H和V通道接收机输出功差值,即双通道幅度差≤0.2 dB,符合技术指标要求。
4 结 语
提出CC-D天气雷达双通道一致性校准方法,采用内外相对测量检验双通道一致性,有效排除了信号源、测试电缆和转接头等设备和元件产生的不确定干扰,辅之以天线和全链路一致性校准,提升了检验的准确率和可信度。经检验双通道动态曲线和动态范围基本一致,双通道幅度差≤0.2 dB,具有良好的校准效果。
猜你喜欢
昆明医科大学学报(2021年4期)2021-07-23 01:21:56
电子制作(2019年12期)2019-07-16 08:45:20
测控技术(2018年6期)2018-11-25 09:50:24
家庭影院技术(2017年9期)2017-09-26 03:41:22
山西大同大学学报(自然科学版)(2016年2期)2016-12-12 03:19:15
电测与仪表(2016年8期)2016-04-15 00:30:16
西部广播电视(2015年5期)2016-01-16 03:45:08
电测与仪表(2015年8期)2015-04-09 11:50:18
电子设计工程(2015年16期)2015-02-27 12:07:56
教育与职业(2014年31期)2014-01-19 01:48:18