
电动护理床升降机构的模糊PID自动化控制方法
2022-06-24 13:59:06姚伟伟王昭林惠闻巍徐明月
机械制造与自动化 2022年3期
姚伟伟,王昭,林惠,闻巍,徐明月
(1. 解放军总医院 海南医院,海南 三亚 572013; 2. 三亚学院,海南 三亚 572022)
0 引言
目前全国人口总数中残疾人和病人数量所占比例较高,我国的人口老龄化问题越来越严重,照顾病人、助老助残的电动护理床的发展潜力巨大[1]。这些特殊群体大部分时间都是在床上度过,在长期卧床的状态下,患者的身体机能会逐渐下降,同时也会引发大小便失禁、褥疮等病症。经调查发现,褥疮会严重影响患者的身心健康,在卧床期间,患者几乎没有户外活动,容易出现妄想症等心理障碍,对患者的痊愈产生不利的影响。利用电动护理床帮助患者进行康复训练,可通过运动提高患者肢体机能,加快康复速度。连杆机构中的连架杆是目前电动护理床常用的主动件,可以帮病人完成屈腿、侧翻、抬背等动作[2]。通过电动护理床的升降功能帮助病人进行相关运动时,病人的背部会出现挤压感和拉拖感,出现这种现象的主要原因是在运动过程中升降机构和人的转动质心存在误差。为了提高病人的舒适性,需要对电动护理床升降机构进行控制。
黄振东等[3]提出基于Ansys软件的电动护理床升降机构控制方法。该方法在电动护理床升降机构的基础上,通过Ansys软件对升降机构的稳定性、振动和应力进行分析,根据振动特性对电动护理床的升降机构进行控制。该方法没有构建电动护理床升降机构的动力学模型,导致方法的跟踪误差较大。徐春博等[4]提出基于视觉的电动护理床升降控制方法。该方法首先对电动护理床升降机构的运动学进行分析,建立升降机构的系统模型,并通过微分反馈复合控制算法实现电动护理床的升降控制。该方法在电动护理床上升控制过程中的位移误差较大,无法满足控制要求。SENTHIL M L等[5]提出了一种基于混合观测器的电动护理床升降机构控制方法。利用fuzzy-PID方法,从低速到高速对电动护理床升降机构控制进行了仿真,并对估计的位置和速度误差进行了优化,在此基础上实现电动护理床升降机构的控制,但该方法在电动护理床下降控制过程中,获得的速度控制曲线与速度期望曲线之间存在差距,导致控制效果差。
为了解决上述方法中存在的问题,本文提出电动护理床升降机构的模糊PID自动化控制方法。
1 相关模型
1.1 动力学建模
电动护理床升降机在升降过程中的升降缸转角较小,为了方便分析可简化电动护理床升降机的运动学建模过程,用直线运动描述电动护理床升降机中的升降缸活塞杆,而不考虑升降缸的转动[6]。
设Fe为电动护理床升降系统等效力,其计算公式如下:
(1)
式中:q代表广义坐标;Ep代表电动护理床升降系统总势能;Ek代表电动护理床升降系统总动能。
可将式(1)转变为式(2):
(2)

(3)
设mi为运动构件在电动护理床升降机构中的质量;vi为运动构件在质心处对应的运动速度;ωi为运动构件在质心处对应的角速度;Ji为在电动护理床升降过程中构件产生的惯量;Ekj为模块对应的动能,可通过动能定理计算得到式(4):
(4)
式中l为构件在模块中的数量。
通过上述分析,获得电动护理床升降机构的总动能Ek:
(5)
液压缸活塞杆遵循动能定理作直线运动[7],因此可通过式(6)计算电动护理床升降机构的动能Ekj:
(6)
式中Mej为第j个模块在电动护理床升降机构中的等效质量。
结合式(4)-式(6),获得等效构件在电动护理床升降机构中的等效质量如式(7)所示。
(7)

(8)
结合式(3)和式(8),获得式(9):
(9)
设Gi、M分别为构件在电动护理床升降机构中对应的重力和重力矩;θi为质心速度与重力之间存在的夹角。通过式(10)计算等效构件在系统中对应的重力:
(10)
通过上述过程,构建电动护理床升降机构的等效动力学模型如式(11)所示。
(11)
1.2 摩擦模型
电动护理床在升降过程中存在低速非连续工况和重载工况,电动护理床升降机构的模糊PID自动化控制方法用外部干扰代替电动护理床升降过程中产生的摩擦力Ff,结合Viscous模型和Coulomb模型计算摩擦力Ff[8]:
Ff=Fcsign(v)+Bv
(12)
式中:v为液压缸活塞在电动护理床升降过程中的速度;B为电动护理床升降机构的等效黏性系数;Fc为库仑摩擦力。在式(12)的基础上获得如图1所示的电动护理床升降机构的摩擦力-速度曲线。

图1 摩擦力-速度曲线
2 模糊PID自动化控制
电动护理床升降机构的模糊PID自动控制方法结合模糊控制方法和PID控制方法,实现电动护理床升降机构的模糊PID自动化控制,具体过程如下所述。
1)将升降控制偏差e以及升降控制偏差变化率ec作为模糊PID自动化控制器的输入,设定输出为u。
2)比例因子与量化因子
用e=[-emax,emax]描述升降控制偏差e相应的基本论域;用ec=[-Δemax,Δemax]描述升降控制偏差变化率ec相应的基本论域;用u=[-umax,umax]描述电动护理床升降控制量u的基本论域。
用E={-na,-na+1,…-1,0,1,…,na-1,na},EC={-nb,-nb+1,…-1,0,1,…,nb-1,nb},U={-nc,-nc+1,…-1,0,1,…,nc-1,nc}分别描述升降控制偏差E、升降控制偏差变化率EC和升降控制量U对应的模糊论域,其中a、b、c均为电动护理床升降控制偏差变化率。
设Ka为电动护理床升降偏差对应的量化因子,其计算公式如式(13)所示。
(13)
可通过式(14)计算得到偏差变化率对应的量化因子Kb:
(14)
设Kc为控制量对应的比例因子,其表达式如式(15)所示。
(15)
比例因子和量化因子的大小在电动护理床升降机构控制过程中的影响较大,比例因子和量化因子在电动护理床升降控制过程中存在相互影响关系,电动护理床升降的控制要求可以通过不同数值得以满足。针对电动护理床升降的控制,仅仅通过一组因子进行控制,难以保证控制效果,因此构建模糊PID自动化控制器时,需要对比例因子和量化因子的大小进行调整。
3)模糊化清晰量
基本论域即为模糊PID自动化控制器输出变量和输入变量在升降控制过程中的实际变化范围。
论域中存在的数值无法直接被模糊PID自动化控制器识别,需要离散化处理实际论域,将其转化为模糊论域:

(16)
式中:PB为正大;NB为负大;PM为正中;NM为负中;PS为正小;NS为负小;ZO为零。
4)根据电动护理床升降控制经验和控制理论建立电动护理床升降模糊控制规则,如表1所示。
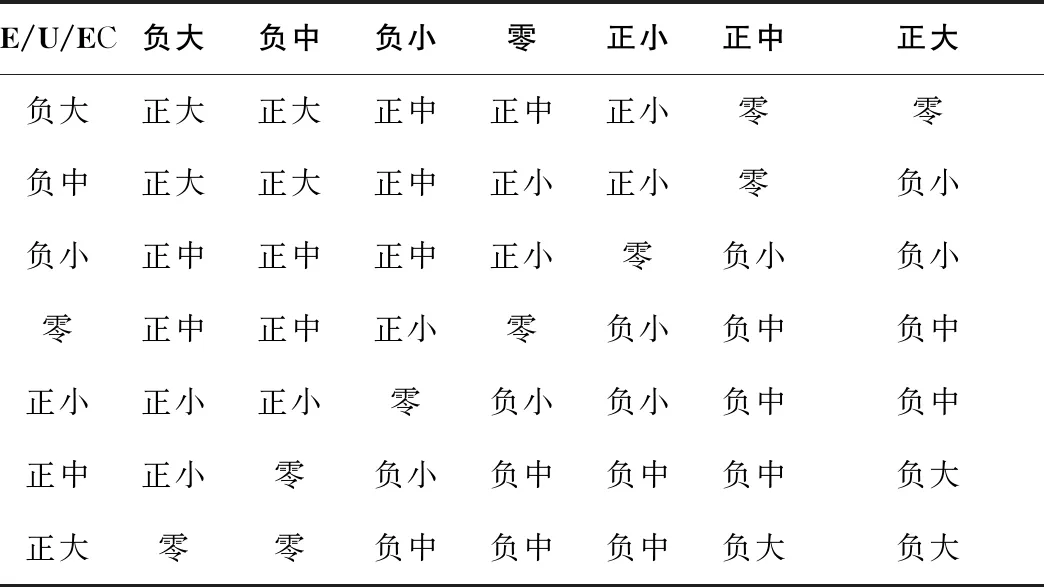
表1 模糊控制规则表
5)根据模糊控制表,获得模糊PID自动化控制器的输出量u,完成电动护理床升降机构的自动化控制。
3 实验与结果
为了验证电动护理床升降机构的模糊PID自动化控制方法的整体有效性,需要对电动护理床升降机构的模糊PID自动化控制方法进行测试。具体的仿真实验方案为:利用传感器采集升降系统的位移值并作为控制器的反馈量;在Simotion Scout软件中编写并运行控制算法程序;通过ET200S上的AO模块传递控制器的输出值到控制阀上,实现电动护理床升降机构实时状态监控和数据的记录与采集。
1)电动护理床上升控制测试
衡量控制系统的主要性能指标是电动护理床上升过程中的运行平稳性和定位精度。采用电动护理床升降机构的模糊PID自动化控制方法(本文方法)、基于Ansys软件的电动护理床升降机构控制方法(文献[3]方法)和基于视觉的电动护理床升降控制方法(文献[4]方法)进行上升运动控制,测试结果如图2所示。
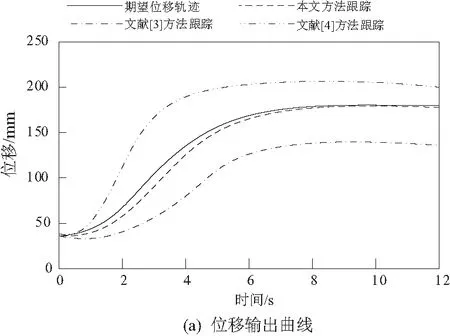
图2 上升运动时不同方法的控制结果
根据图2可知,在电动护理床上升运动过程中,文献[3]方法和文献[4]方法的定位精度低且稳态误差大,本文方法的电动护理床控制性能明显优于上述两种方法,定位的精度高、运行平稳,且控制跟踪误差小,可以满足电动护理床在上升过程中平稳运行和精确定位的控制要求。
2)电动护理床下降控制测试
根据图3可知,在电动护理床下降过程中,由于受到重力的影响,3种方法的控制性能明显低于电动护理床上升控制时的控制性能。电动护理床在下降过程中的系统死区通常高于电动护理床在上升时的死区。文献[3]方法和文献[4]方法在此情况下的控制过程中容易出现时滞现象,位移跟踪误差变大,控制性能降低,无法满足电动护理床升降控制要求。
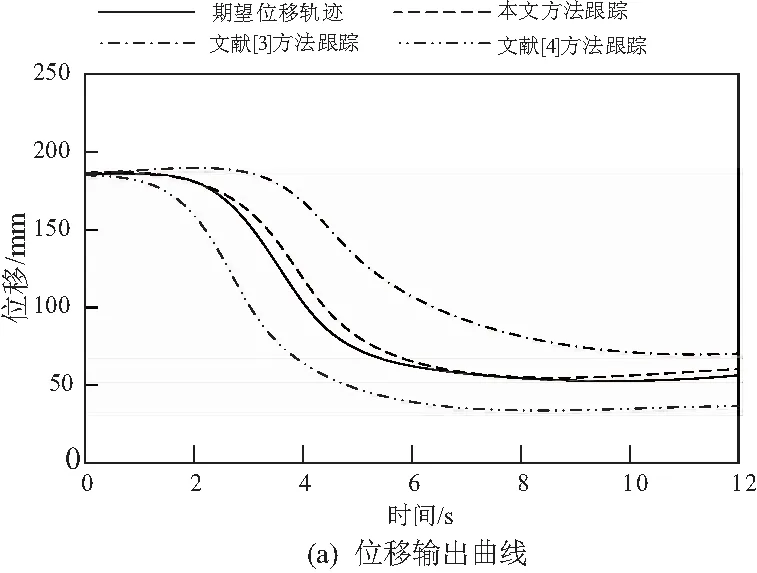
图3 下降运动时不同方法的控制结果
本文方法控制的电动护理床升降机构,建立了电动护理床的动力学模型,在动力学模型的基础上结合模糊控制方法和PID控制方法设计模糊PID自动化控制器,实现电动护理床的升降控制,降低了位移跟踪误差,补偿了模型的不确定性和系统的非线性。通过上述测试,验证了本文方法满足电动护理床升降机构的控制要求。
4 结语
针对目前电动护理床升降机构控制方法无法满足控制要求的问题,提出了电动护理床升降机构的模糊PID自动化控制方法,通过设计模糊PID自动化控制器实现电动护理床升降机构的控制,解决了目前方法中存在的问题,为患者的康复训练提供了良好的条件。
猜你喜欢
小读者(2021年2期)2021-03-29 05:03:20
成都信息工程大学学报(2021年6期)2021-02-12 03:00:52
学生天地(2020年6期)2020-08-25 09:10:50
数学年刊A辑(中文版)(2020年2期)2020-07-25 02:04:36
测控技术(2018年10期)2018-11-25 09:35:52
汽车观察(2018年10期)2018-11-06 07:05:28
车迷(2017年10期)2018-01-18 02:10:46
北京汽车(2017年3期)2017-10-14 02:15:52
广东石油化工学院学报(2016年3期)2016-05-17 05:17:10
电源技术(2016年2期)2016-02-27 09:04:56
