
半主动空气悬架BP-PID控制器设计及其随机路面验证
2022-06-24 13:37:20班小强覃桂全
机械制造与自动化 2022年3期
班小强,覃桂全
(1. 广东南方职业学院 智能制造学院,广东 江门 529000; 2. 迈博自动化机械有限公司,广东 江门 529000)
0 引言
半主动悬架作为一种广泛应用于控制汽车行驶平稳性的悬架结构,其控制机理为只调整悬架阻尼特性参数,而悬架刚度保持恒定,因此这种结构并不能提供动力源,只包含所需的阻尼部件[1-2]。半主动悬架的整体结构较简单,具备高可行性,在实际工作阶段不会造成车辆动力的损耗,对于优化汽车产品控制性能发挥了重要作用,有效保障汽车行驶过程的舒适性、操控稳定性、安全性[3-4]。针对道路表面不平整的情况,有研究人员将油气悬架加入汽车中并对其进行了使用测试,实现了车辆行驶控制特性的显著提升。为油气悬架设置主动控制结构后,可以同时发挥油气悬架自身优势以及根据车辆路况特点实现悬架性能的调控,确保车辆达到理想的行驶稳定性[5]。
相关方面的研究吸引了很多的研究学者。陈登攀等[6]开发了一种可以对主动悬架进行优化控制的算法,同时利用Matlab/Simulink构建得到包含4自由度的模型并对上述悬架开展仿真测试。根据仿真结果发现,采用GA优化处理得到的LQG控制算法可以显著提升主动悬架系统的运行平顺性,同时乘坐舒适性也明显获得改善。武柏安等[7]则根据遗传算法开发得到了半主动悬架的优化控制技术,经仿真测试发现,通过遗传算法设置控制器加权系数时,有助于车辆达到更加平顺的控制性能。李以农等[8]通过模型仿真的方法构建得到主动悬架自适应滑模控制器,之后以自适应模糊神经网络算法完成路面等级的识别功能,并为控制器设置了合适的目标系数,最终实现主动悬架在舒适与安全间的相互协调。
相比较目前的学习算法,传统的PID控制精度不高。目前研究几乎放弃了传统的PID控制,这在一定程度上有些不切实际。本文综合考虑算法精度与效率的条件下设计了一种新的BP-PID控制模型,弥补了传统PID控制的不足,在该算法中融合了神经网络控制器的鲁棒特性。通过神经网络完成PID参数的在线整定功能,通过神经网络来达到对非线性函数进行快速逼近与自主学习的过程,充分克服非线性悬架系统存在表述偏差的缺陷。根据测试结果可知,以BP-PID控制器设置的悬架具备更优平顺性与适应能力,同时鲁棒性也获得显著改善。
1 悬架模型
图1显示了针对汽车悬架构建的二自由度1/4模型,将其表示成以下的运动方程:

图1 汽车悬架力学模型
(1)
(2)
式中:mw表示非簧载质量;mb表示簧载质量;Zr表示路面位移;Zw表示车轮位移;U表示主动控制力;Ks表示油气弹簧刚度;Zb表示车身位移;Kt表示轮胎等效刚度。
图2给出了主动悬架系统的状态变量图,其中V表示车辆行驶速度,G0表示道路的不平度系数。
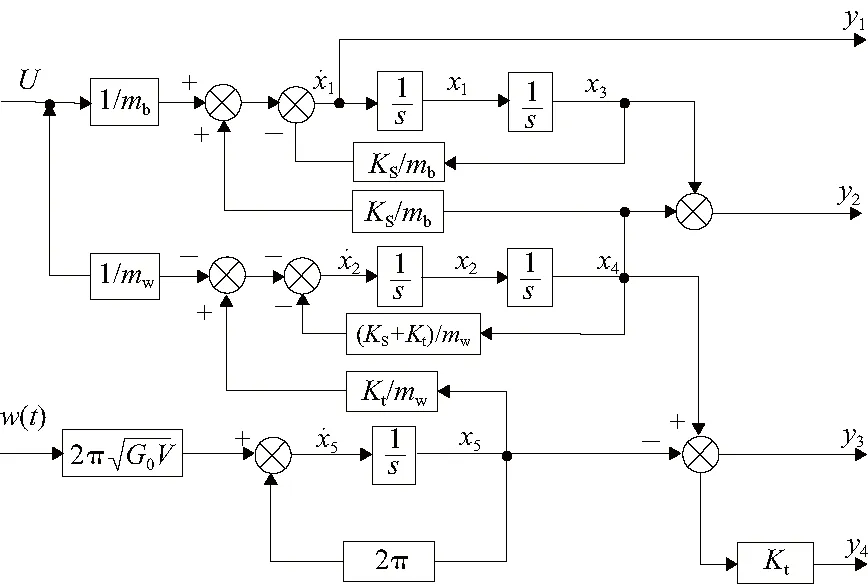
图2 主动悬架系统的状态变量图
2 BP-PID控制器设计
增量型数字PID控制算法表达式[9]为
u(k)=u(k-1)+KP[e(k)-e(k-1)]+KIe(k)+
KD[e(k)-2e(k-1)+e(k-2)]
(3)
式中:u表示控制器输出;e表示系统真实输出(y)相对设计输出(r)的差值;k、k-1、k-2分别对应相应次数迭代后的控制量。
选择4-5-3的三层结构的神将网络进行处理,[r(k),y(k),e(k), 1]表示神经网络的输入。
网络输入格式为
(4)
同时将隐含层输入、输出表示成
(5)
(6)

采用正负对称结构的sigmoid函数设置隐含层神经元活化函数:
(7)
输出层中包含的3个输出接点依次为PID控制器的调节参数KP、KI、KD,各参数取值都为正值,由此可以判断输出层神经元活化函数属于一种非负sigmoid函数,将其表示成以下的形式:
(8)
性能指标函数E(k)计算式为
(9)
利用梯度下降法对网络权系数进行修正,同时新增一惯性项使搜索结果完成快速收敛过程。
(10)
式中:η表示学习速率;α表示惯性系数。
根据上述分析可以得到网络输出层权的以下学习算法:
(11)
(12)
同时得到以下的隐含层加权系数算法:
(13)
(14)
3 随机路面验证
3.1 路面模型
利用高斯白噪声以及成形滤波器来随机调控路面轮廓的不平度。随机面Zr(t)输入为
(15)
式中w(t)表示高斯白噪声信号。
3.2 结果分析
利用Matlab/Simulink构建图3中的1/4车辆悬架动力模型和控制器模型[10]。为了对实际控制效果进行验证分析,对悬架结构开展了仿真测试。将路面模拟信号输入系统中,同时根据汽车设置以下仿真参数:

图3 BP-PID悬架Matlab仿真模型
mb=360 kg,ms=40 kg,Cs=1 000 kg,Ks=20 000 N/m,Kt=200 000 N/m,G0=5.0×10-5m3,V=20 m/s,滤波器截止频率f0=0.01 Hz。
以下是对BP-PID控制器进行仿真测试的具体步骤。
2)实时采集车身的加速度y(k)。
3)根据神经网络的内部计算结果获得Kp、KI、KD参数,再将其传输至PID控制器中。
4)利用式(4)计算PID控制器的输出u(k)。
5)通过式(8)与式(9)调节神经网络隐含层的加权系数,由此完成PID参数的自整定过程。
6)计算k=k+1,重新跳转至步骤2)。
关于主要参数:车身加速度,悬架动挠度轮胎动挠度的仿真测试得到图4-图6所示的结果,结果见表1。根据表1可以发现,BP-PID悬架可以显著减小车身加速度,通过计算标准差发现相对LQG主动控制悬架降低了近80%,从而获得更舒适的乘坐性能。经过上述处理后,悬架动行程的标准差减小,但并未达到LQG悬架的优化性能。
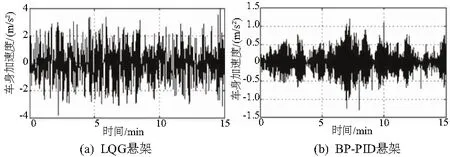
图4 车身加速度响应结果

图5 悬架动挠度响应结果

图6 轮胎动挠度响应结果

表1 仿真结果比较
LQG控制悬架可以实现车身加速度的均匀降低,并使悬架和轮胎的动挠度也显著减小。这是由于可以利用LQG控制器提取上述状态量,并通过设置合适加权系数来实现均衡控制的性能。不过也需注意LQG控制器属于一种线性控制结构,无法满足优异鲁棒性,特别是在处理具有非线性刚度的悬架结构时,建立的仿真模型存在明显偏差,因此使用LQG控制器并不能达到跟仿真过程同样的控制性能。
BP-PID控制悬架对于控制车身加速度存在显著优势,而悬架动挠度控制性能相对LQG控制器更差。这是因为BP-PID控制器只提取车身加速度参数来实现悬架的控制,而没有充分考虑其他因素造成的干扰,因此只是单纯关注车身加速度的提升[11]。根据以上分析可知车身加速度和悬架动挠度存在相互矛盾的缺陷,为降低路面噪声引起的车身结构变化以达到良好平顺性,从而需要选择较 “软”的悬架,由此增大了悬架的动行程,引起轮胎动载荷的明显改变,降低了车辆的操控稳定性。
从能源消耗角度分析,LQG控制悬架可以达到±1 000 N的控制力变化幅值,BP-PID控制悬架则达到±1 500 N幅值,由此可以判断BP-PID控制悬架更满足节能环保的控制要求,并且LQG控制器具备更简化的结构,不需要使用很高要求的控制系统硬件。
4 结语
BP-PID悬架可以显著减小车身加速度,获得更舒适的乘坐性能。BP-PID控制悬架对于控制车身加速度存在显著优势,BP-PID控制悬架则达到±1 500 N幅值,由此可以判断BP-PID控制悬架更满足节能环保的控制要求;并且LQG控制器具备更简化的结构,不需要使用很高要求的控制系统硬件。BP-PID控制器表现出了更优的鲁棒性能与非线性特性,能够更明显降低车身加速度,具备良好的未来应用前景。
猜你喜欢
世界汽车(2022年11期)2023-01-17 09:30:50
World Journal of Clinical Cases(2020年16期)2020-09-16 13:35:08
北京汽车(2016年6期)2016-10-13 17:07:50
现代制造技术与装备(2015年4期)2015-12-23 10:20:18
汽车维修与保养(2015年7期)2015-04-17 02:12:44
汽车维护与修理(2015年6期)2015-02-28 12:17:31
汽车维护与修理(2015年2期)2015-02-28 12:15:51
吉林地质(2014年4期)2014-03-11 16:47:56
汽车维护与修理(2014年10期)2014-02-28 12:15:00
机械与电子(2014年2期)2014-02-28 02:07:44
