
智能轨道快运列车电池系统监控方案设计
2022-06-24 03:04李朝阳
山西电子技术 2022年3期
李朝阳
(湖南高速铁路职业技术学院,湖南 衡阳 421002)
0 引言
智能轨道快运列车(ART)是一种创新型现代城市低地板电车,与现代有轨电车相比,该车采用胶轮承载,取代了传统的钢轮钢轨,因此不需要铺设专用的物理轨道,通过轨迹跟随控制技术,控制车辆在虚拟轨道上智能导向,同时依靠特定的信号控制技术对列车在虚拟轨道行进进行约束,提高安全性[1]。ART在行车、充电模式下,通过BMS实时监控电池系统状态,根据当前电池系统电压、电流、温度、绝缘情况,判断电池系统安全性。当ART由行车或者充电模式进入到静置状态时(ART低压电源断开后),列车各设备均处于无电状态,而此时单体电芯的化学反应在短时间内仍持续进行,由于BMS无法对电池状态进行监测,所以,单体电芯从活跃状态到平静状态的这段时间内可能引发电池过温故障、漏液导致的绝缘故障等,造成重大安全隐患[2]。
为解决此问题,本文针对ART设计了一种电池系统全天候在线监控方案,该方案通过电池系统配置24 h监控DC/DC模块,由DC/DC模块定时自唤醒,向BMS定时输出低压电源、唤醒BMS,实现BMS定时监控电池系统状态,上报后台监控平台,后台根据电池状态进行分析、处理,实现车辆静置状态下电池故障预警[3]。
1 监控系统电气方案设计
监控系统主要由BMS、DC/DC、火灾烟雾探测报警器、云智通监控模块(TBOX)、后台监控系统组成。各部件通过CAN网络实现通信及交互指令,智能轨道快运列车在静置状态下,由DC/DC给BMS和火灾烟雾探测报警器提供24 V电源,电气连接关系如图1所示。
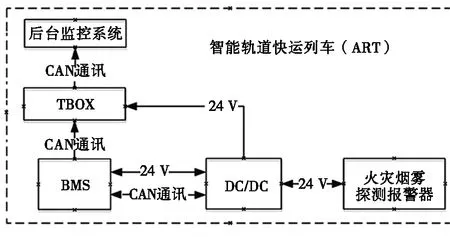
图1 ART电池系统监控原理图
ART插枪充电时,BMS与充电桩握手成功后,通过CAN网络与DC/DC模块进行通信,充电桩输出A+信号使能DC/DC,DC/DC输出24 V使能BMS,BMS发送相应报文指令输出锁止信号,保持DC/DC24 V持续输出,充电下电时设置DC/DC模块唤醒模式以及唤醒时间间隔,DC/DC停止输出24 V。
行车时,DC/DC模块处于休眠模式,行车下电后激活DC/DC模块,设置唤醒模式以及唤醒时间间隔。
充电下电及行车下电时(车辆静置),DC/DC进入唤醒模式,将自行根据设定逻辑进行自唤醒,当达到唤醒间隔时间时,DC/DC开始工作,同时输出24 V给BMS、TBOX、火灾烟雾探测报警器。BMS对电池系统进行监测,并同步将监测及报警信息上传至TBOX,TBOX将电池系统信息及时反馈至后台监控系统进行实时显示,以便工作人员能及时掌握电池系统信息,若电池系统出现故障,也能及时安排工作人员前往现场对ART进行维护。
2 监控系统软件控制设计
监控系统软件控制为BMS与DC/DC协同交互控制,软件控制由唤醒逻辑和休眠逻辑组成。
2.1 唤醒逻辑
DC/DC模块低压控制端引脚定义如表1所示。

表1 DC/DC模块控制端引脚定义
其中,控制信号Aux1、Aux2、Disable高电平为有效,低电平为无效,CAN报文DC/DC控制指令==0为“无效”,即“禁止输出24 V无效”,1为“有效”,即“禁止输出24 V有效”;接收BMS唤醒时间设定后以BMS所设定时间唤醒,未接收BMS唤醒时间设定时以BMS前一次设定时间唤醒。唤醒时间设定超出范围时视作无效操作,唤醒时间采用前一次设定时间唤醒;Keyon信号消失时,BMS可通过Aux2信号唤醒DC/DC控制电路,并通过CAN通讯重新设置唤醒时间;Aux2为BMS端所发送给DC/DC的控制信号;Loss即未收到CAN报文,持续5 s未收到CAN报文判定为Loss;本方案自唤醒流程如图2所示。

图2 监控唤醒流程
2.2 休眠逻辑
当CAN通信指令正常,若此时BMS并未给DC/DC发送Aux2指令,DC/DC不进入自唤醒模式,即关闭休眠模式;当BMS与DC/DC之间无通讯时(列车下电),下电时刻,BMS发送Aux2指令给DC/DC,则DC/DC不进入休眠(等待自唤醒),休眠逻辑如表2所示。
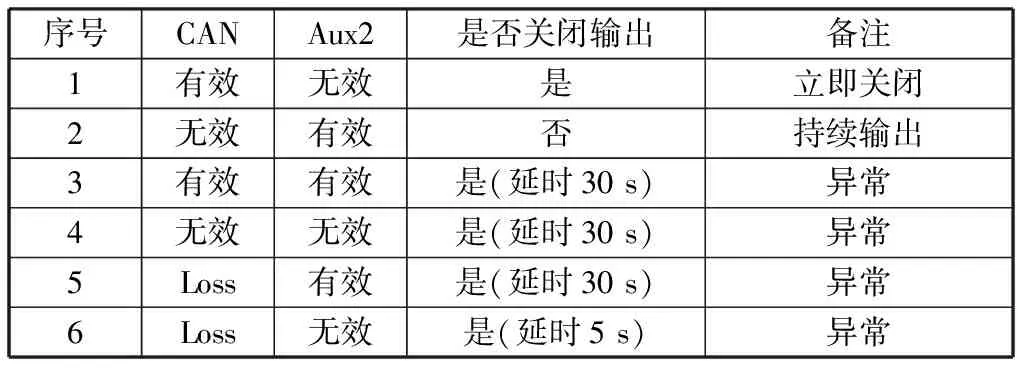
表2 休眠逻辑
CAN报文DC/DC控制指令==0为“无效”,即“禁止输出24 V无效”,1为“有效”,即“禁止输出24 V有效”;控制信号Aux1(A+)、Aux2、Disable(keyon)高电平为有效,低电平为无效;Aux2为BMS端所发送给DC/DC的控制信号;Loss即未收到CAN报文,持续5 s未收到CAN报文判定为Loss。
3 总结
本文提出了ART列车电池系统全天候在线监控方案,通过BMS与DC/DC之间的CAN交互,让DC/DC分别进入自唤醒模式和休眠模式,有效解决了ART在下电后电池系统处于无监控的盲区状态,提高了ART列车的可靠性与安全性。
猜你喜欢
汽车电器(2022年9期)2022-11-07
法律方法(2022年2期)2022-10-20
中学生百科·大语文(2021年11期)2021-12-05
纺织科学研究(2021年7期)2021-08-14
小哥白尼(趣味科学)(2021年4期)2021-07-28
云南画报(2021年4期)2021-07-22
空间科学学报(2021年6期)2021-03-09
铁道通信信号(2020年4期)2020-09-21
中国外汇(2019年11期)2019-08-27
小学生学习指导(低年级)(2019年6期)2019-07-22
