真空比对系统高精度转台设计与分析*
2022-06-23 10:57王钰玮王凯贾瑞栋叶新
机电工程技术 2022年5期
王钰玮,王凯,贾瑞栋,叶新
(中国科学院长春光学精密机械与物理研究所,长春 130033)
0 引言
真空共光路比对装置[1]是一种可溯源至太阳总辐照度的定标装置,可以模拟在轨工作时的真空环境,矫正空间光学遥感仪器辐射标度。真空比对转台是搭载高精密仪器、增加系统的自由度,实现高精度重复定位,决定真空共光路比对装置光路入射角度准确性的重要装置。因此,提高转台的定位精度对提高空间光学遥感仪器的定标精度具有重要意义。
目前,转台按驱动方式分类可分为:电机主轴直驱[2-4]、齿轮齿圈或者其他类似带、齿轮改造的接触元件间接驱动[5-7]。电机主轴直接驱动是旋转设备最常见的驱动方式,可实现转台的高精度重复定位,但对于大负载的转台而言,直驱需要较大的力矩电机且对控制要求较高,很难准确地停留在理想位置;齿轮齿条或者其他类似带、齿轮改造的接触元件间接驱动解决了力矩电机的大力矩要求和准确停留的问题,但高精度齿条造价较高,且通常过定位安装,有装调困难,很难保证精度要求。
丝杠直驱的转台设计是一种利用四连杆衍生机构将丝杠直线运动转变成转台转动的驱动方式。转台设计采用成型、易于生产的产品,解决了齿轮齿条间接驱动的造价和装调问题,同时对电机力矩和控制要求较低,具有装调简单、转动精度高、负载大、可靠性高、成本低的特点。目前关于丝杠直驱的转台设计的研究很少,因此,本文提出一种使用丝杠直驱的转台设计方案,计算转动精度,并仿真证明负载的可行性。
1 转台结构设计
1.1 指标要求
真空比对系统高精度转台的结构设计要求结构具有较高的角度定位精度,主要实现转台顺、逆时针15°高重复定位精度的转动。同时在负载作用下,轴系精度和结构尺寸都能够保持稳定,研究重点是其结构设计、精度计算和承载能力有限元分析。具体转台设计要求的性能参数如表1所示。

表1 转台设计要求参数
1.2 结构设计
如图1所示,转台结构主要由支撑组件、转动平台、转台传动滑块、支撑导轨连接组件、丝杠连接组件、丝杠动力组件和支撑导轨组成。支撑组件、丝杠动力组件、支撑导轨与光学平台固定连接。支撑组件、丝杠连接组件、支撑导轨连接组件均为轴系系统,均可实现一维转动。其中丝杠连接组件与转动平台、丝杠动力组件可实现相对滑动;支撑导轨连接组件与转动平台、支撑导轨也可实现相对滑动。

图1 转台结构
真空比对系统高精度转台是由电机带动丝杠提供动力,经过丝杠连接组件将丝杠直线运动变为转台转动运动,带动整个转台转动。支撑组件和两组支撑导轨连接组件组成转台的三点支撑,并通过支撑组件的编码器与丝杠动力组件的电机组成闭环系统。
图1 中转台传动滑块、丝杠连接组件和丝杠动力组件组成直线运动变转动的动力部分;如图2 所示,转台丝杠连接组件是由轴、深沟球轴承、轴承座、端盖和弹性挡圈组成的轴系系统。端盖与轴承间存在间隙。

图2 丝杠连接组件轴系结构
图3所示为转台三点支撑组件,包括转台支撑组件、两套支撑导轨连接组件两部分。如图3(a)所示,转台支撑组件是由轴、推力球轴承、深沟球轴承、轴承、弹性挡圈和编码器组成的轴系系统;如图1、图3(b)所示,滑块机构、转台支撑导轨连接组件和转台支撑导轨组成直线运动变转动的支撑部分。转台导轨连接组件是由轴、推力球轴承、深沟球轴承、轴承座和弹性挡圈组成的轴系系统。
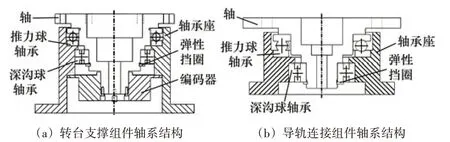
图3 支撑轴系结构
1.3 自由度计算
如图1、图2、图3(b)所示,直线运动变转动机构动力部分和支撑部分都可以简化成图4 所示的双滑块机构。其中,动力部分滑块A与转台丝杠动力组件间滑动连接,支撑部分滑块A与支撑导轨间滑动连接,滑块B 与转台底板间滑动连接,滑块A 与滑块B 间转动连接。滑块A、B 的滑动均为低副,滑块A、B 间的转动连接也为低副。

图4 直线运动变转动机构简化图
转台整机可以简化成图5 所示。转台与光学平台于点P转动连接,滑块A1、A2和A3与光学平台相对滑动,滑块B1、B2和B3与转台相对滑动,滑块A1、A2和A3与滑块B1、B2和B3分别转动连接。其中,活动部件共7个,分别为滑块A1、A2、A3、B1、B2、B3和转台。

图5 转台整机简化图
滑块A1、A2、A3、B1、B2、B3的滑动连接均为低副,滑块A1、A2、A3和滑块B1、B2、B3之间的转动连接均为低副,转台与光学平台间的转动为低副。
综上可知,转台整机拥有7 个活动部件,6 个滑动副,4个转动副。因此,转台整机自由度S为:

2 运动精度计算
真空比对转台运动精度包括转动精度和重复定位精度两部分[8-9]。转动精度是指电机带动丝杠促使转台转动的分辨率,转台重复定位精度是指转台在多次大幅转动后相对于初始位置的角度偏差。
2.1 转动精度计算
整个转台可简化成图6 所示的示意图,转台支撑组件距丝杠距离d,当丝杠带动转台移动距离h时,转台会产生大小为α的转角。转台的转动精度是两次电机单步带动转台运动的转动角度转动偏差,即两次转角α的差值。

图6 丝杠精度转换转台转动精度原理
丝杠导轨采用普通精度级别,丝杠导程为z2,重复定位精度为s1;电机步距角为θ1,减速器减速比为f,电机减速器组合回程误差为σ1;绝对编码器位数为k,编码器重复定位精度为σ2。具体参数大小如表2所示。

表2 转台运动精度参数
真空比对转台是闭环系统,由电机经过减速器,带动丝杠进行传递,转动精度是由编码器分辨率和丝杠推动精度两部分决定。根据表2 所示参数,对编码器分辨率和丝杠的推动精度分别计算。
转台编码器采用绝对式编码器,编码器的分辨率σ3为:

无细分条件下,电机转动一步可驱动丝杠的传动距离h2为:

在丝杠的传动距离h2的作用下,转台的转动角度β3优于:

因此,对比对编码器分辨率和丝杠的推动精度可知:转台的转动精度β3远优于编码器分辨率σ3,即转台转动精度优于编码器分辨率0.000 343°。
2.2 重复定位精度计算
同样,转台的重复定位精度也是由编码器重复转动定位精度和丝杠传动重复转动定位精度两部分决定。根据表2 所示参数,对编码器重复转动定位精度和丝杠传动重复转动定位精度分别计算。
转台编码器的重复转动定位精度σ2为:

丝杠传动的重复定位精度包括电机回程误差、轴承座间隙误差和丝杠重复定位误差3部分。
电机回程误差对驱动丝杠的最大传动精度h3影响为:

轴承座与主轴间最大间隙h4=0.012 mm,丝杠导轨重复定位精度h5=0.01 mm,因此丝杠导轨驱动组件传动重复定位精度h6为:

在丝杠的重复定位精度h6的作用下,丝杠导轨驱动组件对转台转动重复定位精度β4优于:

因此,对比编码器重复转动定位精度和丝杠传动重复转动定位精度可知:转台的重复定位精度β4远优于编码器定位精度σ2,则有转台的转动重复定位精度为0.004 2°
综上,丝杠转台的转动分辨率和重复定位精度优于编码器的分辨率和定位精度。采用普通级别的编码器即可实现优于0.000 5°的转台转动精度,优于0.005°重复定位精度。
3 负载仿真分析
真空比对装置是地面定标设备,转台整机采用标准件,其中轴承、导轨许用负载均在1 t以上,且转台无需高速转动,因此对高精度丝杠直驱转台的负载仿真主要对转台台面进行有限元静力学分析[10-12],分为面形变化和应力分析两部分。
如图7 所示,比对转台安装底板上方矩形位置和圆形位置将分别放置质量为m1的低温真空罐和质量为m2的常温真空罐。底板下方为三点支撑的3 个安装接触面。底板采用304 不锈钢材,总长为1.1 m,总厚度20 mm,底板下方为若干深度10 mm减重槽。

图7 有负载大板子有限元图
具体仿真参数如表3所示。

表3 转台仿真参数
本文通过有限元分析的方法,将转台安装底板实体模型导入软件进行网格划分,网格划分采用四面体网格划分,划分精度为默认值。划分完的转台安装底板的有限元模型如图7所示。有限元分析时,输入表3参数进行材料模型建立,并根据上述三点支撑位置,对转台支撑、传动导轨与转台接触面添加3 处位移约束。与此同时,根据实际低温真空罐和常温真空罐质量和受力面面积大小对矩形面和圆面的受力面分别施加垂直于板面大小分别为542 3.1N∕m2、3 571.4 N∕m2的均布载荷,并进行静力学分析。
在上述均布载荷的作用下,经静力学分析求解,可得如图8(a)所示的转台底板Y方向的位移云图。从图上可以看出转台底板3 点支撑部分,面形变量很小,两侧变形量逐渐递增,其中红色部分为转台在负载作用下面形变化最大的区域,最大变动量为0.084 9 mm;图8(b)为转台底板应力云图,在转台底板矩形和圆形负载的中心都出现了较大应力,其中圆形负载面中心存在最大应力,最大应力为3.04×107Pa。

图8 有限元求解结果
对转台底板进行复核计算,由图8 可知,最大变动量0.084 9 mm、最大应力3.04×107Pa 满足设计面形变化量小于0.1 mm、材料许用应力1.37×108Pa的要求。
4 结束语
本文根据真空比对装置的任务要求和技术指标,设计了一种应用于真空比对装置的新转台结构形式,计算了转台自由度、转台精度,分析了转台最大负载作用下的面形变化量和最大应力,所得的主要结论如下:
(1)所设计的转台的无过定位,易于装调;
(2)所设计的转台可实现优于0.000 5°的转台转动精度、优于0.005°的高精度重复定位;
(3)所设计的转台面形变化量0.084 9 mm、最大应力3.04×107Pa 均在设计面形变化许用范围和材料许用应力范围,转台可实现200 kg负载要求。
猜你喜欢
机床与液压(2022年8期)2022-09-19
中学生数理化(高中版.高考理化)(2022年3期)2022-04-26
中学生理科应试(2021年10期)2021-12-07
商品与质量(2020年48期)2020-11-26
汽车实用技术(2020年4期)2020-04-10
轻兵器(2019年8期)2019-08-30
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
船舶标准化工程师(2018年3期)2018-09-12
雷达学报(2017年1期)2017-05-17