
储能液压缸协同驱动重型机械臂系统研究与优化
2022-06-22 02:52夏连鹏
中国机械工程 2022年11期
晋 超 权 龙 夏连鹏,2 葛 磊 赵 斌
1.太原理工大学新型传感器与智能控制教育部重点实验室,太原,0300242.三一重机有限公司,昆山,215300
0 引言
工程机械以内燃机驱动液压泵为集中动力源,经多路阀分配和传递动力,驱动液压执行器动作,存在能效低[1]、排放差的致命不足,极大地增加了整机燃油消耗和温室气体排放,工程机械已成为仅次于汽车领域的第二大燃油消耗及污染排放大户。重型机械臂作为大多数工程机械的工作装置,工作过程中常伴随着大量重力势能的损失。以工程机械的标志性产品液压挖掘机为例,其动臂具有自重大、升降频次高、运行周期短的特点,而传统液压挖掘机采用多路阀控制,造成动臂下放时巨大的重力势能经控制阀阀口节流作用转化为热能耗散,且系统需另增冷却装置来降低油液温度,进一步造成了能量浪费,降低了液压挖掘机的能效[2]。这也使得实现重型机械臂重力势能高效回收和利用成为国内外学者研究的热点方向之一。
目前,液压挖掘机动臂重力势能的回收利用方式有电气式和液压式[3]。电气方式回收利用一般需要在原动臂液压系统中增设液压马达、发电机、电动机、超级电容及蓄电池等能量储存和转换元件,工作过程中,动臂势能先经液压缸转换为压力能,再利用液压马达将液压能转换为机械能,驱动发电机发电,最终以电能的形式存储在超级电容或蓄电池中[4]。林添良等[5-6]设计了带有节流调速的液压马达-发电机单元电气式回收系统,动臂下放时采用节流调速与容积调速相结合的控制策略,势能回收率约为39%;进一步,他们针对此系统提出在回收单元中加入蓄能器辅助回收势能,以降低回收元件的所需功率,并结合两级压力阈值控制策略,使势能回收率提高至45%。关澈等[7]、李洁等[8]将电气式回收单元应用于6 t纯电驱液压挖掘机进行动臂势能回收再利用,仿真结果表明,新系统的势能回收率可达到60%。张克军等[9-10]提出了一种基于发电机和超级电容的电动叉车势能回收方案,结合电机转速模糊PI控制系统,势能回收率可达约50%。电气式回收势能方案利用了电池组等电气元件能量密度大的优点,但能量转换次数多、回收速度慢,节能效果会受到一定的限制[11]。
液压方式回收利用动臂势能可根据是否有平衡结构分为蓄能器直接储能方式和动臂自重液气储能平衡方式。蓄能器直接储能方式是指蓄能器与驱动缸的无杆腔通过节流阀相连,节流阀起控制动臂下降速度的作用。动臂下放时,液压缸无杆腔压力升高,势能转化为液压能存储在蓄能器中[12]。当对存储的能量再利用时,束世辰等[13]将蓄能器中的高压油液引入液压泵进油口,通过降低液压泵进出油口压差来降低液压泵的输入功率;XIAO等[14]将蓄能器中的油液引入泵排油口,通过降低液压泵的输出流量来降低液压泵功率,但只有当蓄能器压力大于泵出口压力时才能运行;CASOLI等[15]将蓄能器中存储的液压能经液压马达转换为机械能,辅助动力源驱动液压泵,通过降低电动机输出功率来实现节能效果。蓄能器直接储能方式对动臂重力势能的再利用过程需通过节流阀控制,引起节流损失,因此节能效果不佳。
动臂自重液气储能平衡方式是指蓄能器与平衡液压缸或独立储能腔相连构成平衡单元,动臂下放时,势能经平衡单元转化为液压能储存在蓄能器中;动臂举升时,平衡单元协同驱动液压缸驱动动臂上升,可实现势能的回收和利用一体化[16]。许多学者已对动臂驱动系统添加平衡缸-蓄能器单元的方案开展了研究[17-19],但现有研究中驱动液压缸多采用原机型液压缸参数,未针对液压挖掘机多种工况对该方案中各液压缸参数进行优化。
针对以上不足,本文首先分析了储能缸协同驱动动臂系统的工作原理,在建立系统数学模型的基础上构建了76 t液压挖掘机整机联合仿真模型,并通过试验研究验证了仿真模型的准确性。根据储能缸与驱动缸无杆腔面积比对液压挖掘机空载和带载工况下液压泵输出能量的影响,优化了驱动缸和储能缸参数,分析了优化后系统的节能效果。
1 系统工作原理
图1所示为驱动液压缸与储能液压缸协同驱动重型机械臂回路原理,系统可分为驱动回路和储能回路两部分。图1中,A表示驱动缸无杆腔,B表示驱动缸有杆腔,C表示储能缸无杆腔。
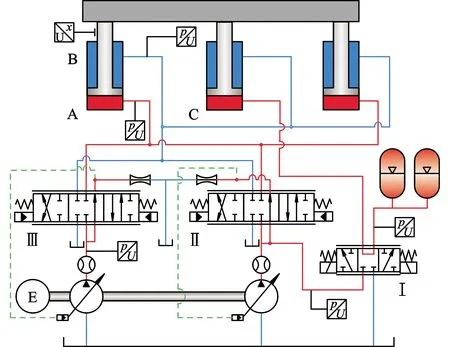
图1 驱动液压缸与储能液压缸协同驱动机械臂回路原理
新系统的特点是增设一个与原机动臂液压缸并联的储能液压缸,储能液压缸的无杆腔经控制阀中位与蓄能器直接连通。
动臂上升阶段,液压泵输出的油液进入驱动液压缸的无杆腔,蓄能器中储存的液压能经储能液压缸转化为机械能,二者协同驱动动臂上升,存储在蓄能器中的液压能转化为动臂的重力势能,实现了能量的再利用。
动臂下降阶段,液压泵输出的高压油进入驱动液压缸和储能液压缸的有杆腔,工作装置重力及有杆腔压力共同作用使动臂下降,工作装置的重力势能经储能液压缸转换为液压能,并直接储存在蓄能器中,实现了动臂重力势能的回收。
系统中设置有蓄能器补油控制阀Ⅰ,当蓄能器压力处于正常范围时,控制阀Ⅰ处于中位;当蓄能器压力不足需要充压时,控制阀Ⅰ处于右位,主系统向蓄能器补充油液;当动臂需要参与挖掘作业时,控制阀Ⅰ处于左位,储能液压缸无杆腔与油箱连通。
2 储能缸协同驱动动臂系统建模
储能缸协同驱动动臂系统相较常规系统,其运行特性发生了较大改变,为充分认识和了解其工作特性,首先建立系统数学模型,在此基础上使用Simulation X搭建76 t液压挖掘机多学科联合仿真模型,然后改造76 t试验样机,并对样机动臂运行特性的仿真和试验结果进行对比,以验证仿真模型的准确性。
2.1 系统数学模型
液压驱动回路由负流量液压泵、驱动液压缸与储能液压缸及开中心液压阀等构成,各部分数学模型如下。
2.1.1负流量液压泵数学模型
在不考虑油液压缩性和管路泄漏的前提下,设定液压泵出口压力为pp,则多路阀中位节流口的流量-压力方程为
(1)
式中,qT为阀中位节流口流量;Cd为流量系数;AT为中位节流口过流面积;pi为负流量反馈检测压力;ρ为油液密度。
反馈回油节流口的流量-压力方程为
(2)
式中,qm为反馈回油节流口流量;Am为反馈回油节流口通流面积;pb为回油背压。
由于通过阀中位的流量与通过反馈回油节流口的流量相等,故由式(1)、式(2)可得
(3)
变量控制阀阀芯运动方程为
(4)
式中,As为变量控制阀的控制腔面积;Fs为控制柱塞弹簧力;xs为阀芯位移;ms为阀芯组件质量;Bs为阀芯阻尼系数;ks为阀芯控制腔弹簧系数。
变量活塞流量连续性方程为
(5)
式中,qpi为变量活塞大腔输入流量;Api为变量活塞大腔有效作用面积;xpi为变量活塞位移;Vpi为变量活塞大腔有效容积;E为油液弹性模量;ppi为变量活塞大腔压力;Cpi为变量活塞泄漏系数。
变量活塞受力方程为
(6)
式中,Api1为控制活塞小腔有效作用面积;mpi为控制活塞质量;Bpi为控制活塞阻尼系数。
液压泵排量为
D=kDxpi
(7)
式中,kD为泵排量系数。
液压泵输出流量为
qp=npD
(8)
式中,np为液压泵转速。
2.1.2液压缸数学模型
液压缸数学模型包括液压缸的受力方程和与其容腔有关的流量连续性方程,根据这两类方程,在Simulation X软件中以容腔为核心即可建立整个液压系统的仿真模型。
储能缸受力平衡方程为
(9)
储能缸无杆腔流量连续方程为
(10)
储能缸有杆腔流量连续方程为
(11)
驱动缸无杆腔流量连续方程为
(12)
式中,FC为负载力;BC为储能缸活塞阻尼系数;mC为储能缸活塞质量;Ff为摩擦阻力;x、v、t分别为液压缸运动的位移、速度和时间;AC、pC、qC分别为储能缸无杆腔的作用面积、压力和流量;AB1、qB1分别为储能缸有杆腔的作用面积和流量;pB为驱动缸有杆腔的压力,由于储能缸有杆腔与驱动缸有杆腔相连,故储能缸有杆腔压力也为pB;AA、pA、qA分别为驱动缸无杆腔的作用面积、压力和流量;CEA、CEB1、CEC分别为驱动缸无杆腔、储能缸有杆腔和储能缸无杆腔的外泄漏系数;CB1C为储能缸内泄漏系数;CAB为驱动缸内泄漏系数。
2.1.3开中心液压阀数学模型
负流量系统的核心是排量与控制压力成反比的负流量泵,所以多路阀为开中心方式,即阀芯位于中位时液压泵输出的液压油可经过多路阀流回油箱。
液压阀阀芯动力学方程为
(13)
式中,Av为阀芯端面作用面积;pv1、pv2分别为阀芯两端压力;kv为阀芯弹簧刚度;xv为阀芯位移;mv为阀芯质量;Fflow为液动力;tv为阀芯运动时间。
阀口流量为
(14)
式中,Δp为阀口两端压差;AE为阀口通流面积。
2.2 建立联合仿真模型
根据储能缸协同驱动动臂系统原理及系统数学模型,首先将Pro/E中构建的液压挖掘机三维模型与初始状态下各构件的质心坐标和相对于铰接点的转动惯量导入Simulation X仿真软件中,然后将液压缸的两个铰接点与液压系统进行机液耦合,液压缸的驱动力输出到铰接点,三维模型通过所推导的数学公式计算出位移与速度再反馈到液压缸,通过仿真软件中机械与液压数字化接口的实时转换,实现机械与液压数据交互,最后添加控制系统模型,构成图2所示的整机的机、电、液多学科联合仿真模型。

图 2 76 t液压挖掘机联合仿真模型
模型中,两个主液压泵为负流量控制液压泵,排量均为260 mL/r, 动臂液压缸行程为1730 mm,液压缸活塞直径为190 mm,活塞杆直径为125 mm。动臂质量约为7500 kg,斗杆质量约为4500 kg,铲斗质量约为2000 kg。
2.3 试验样机改造及仿真模型验证
由于大型液压挖掘机不方便安装位移传感器,故试验仅在液压泵出油口安装压力和流量传感器,在液压缸各油口安装压力传感器,用于检测液压缸两腔以及泵出口的压力和流量,使用Parker Service Master Plus采集数据,构建图3所示的试验样机,本试验中使用到的传感器如表1所示。

图3 76 t液压挖掘机样机

表1 传感器型号列表
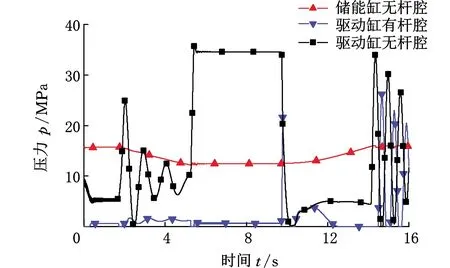
为验证仿真模型的准确性,对原机型动臂驱动系统的运行特性进行了试验和仿真研究。试验和仿真对比曲线见图4。
对比图4曲线可知,在动臂上升过程中,液压泵出口压力的仿真值较试验测试值略大(约为1.5 MPa),波动次数相同但仿真幅值略大,说明容腔仿真模型的阻尼比实际系统的阻尼略小,由于影响系统阻尼的因素较复杂且阻尼略小对系统影响不大,故可认为液压泵出口容腔参数设置基本吻合。液压缸无杆腔压力的仿真与试验波动幅值相当,波动次数也大致吻合,说明仿真参数设置合理。在动臂下降过程中,液压泵输出压力的试验值与仿真值基本吻合,液压缸无杆腔压力的仿真值略大于试验值,变化趋势吻合。

(a)液压泵输出压力
综合上述分析,整个过程中仿真与试验的响应时间基本吻合,说明所构建的仿真模型比较准确,能够反映真实的工作特性,可以用来指导整机设计和预测机器的运行特性。
3 优化仿真研究
3.1 原系统仿真
原系统储能缸与驱动缸的参数配置一致,因此将多学科联合仿真模型中驱动缸和储能缸的无杆腔直径设置为190 mm,液压缸杆径设置为125 mm,匹配蓄能器参数后,将液压蓄能器充气压力设为15.6 MPa,蓄能器体积设为240 L,系统仿真结果如图5所示。
由图5仿真结果可得,动臂上升时两液压泵输出能量为623.9 kJ,液压缸输出能量为482.8 kJ,不考虑摩擦损失,节流损失为141.1kJ,蓄能器输出能量为464.3 kJ,计算可得蓄能器供能占比约为42.7%。动臂下降时只有泵1供油,液压泵输出能量为361.9 kJ,根据位移变化可计算得到重力势能变化了801.9 kJ,蓄能器存储能量为458.2 kJ,能量回收率约为39.4%。动臂一次举升和下降过程中,液压泵共计输出能量为985.8 kJ,相比无液气储能单元的机型,节省能量369.2 kJ,节能率为27.2%。
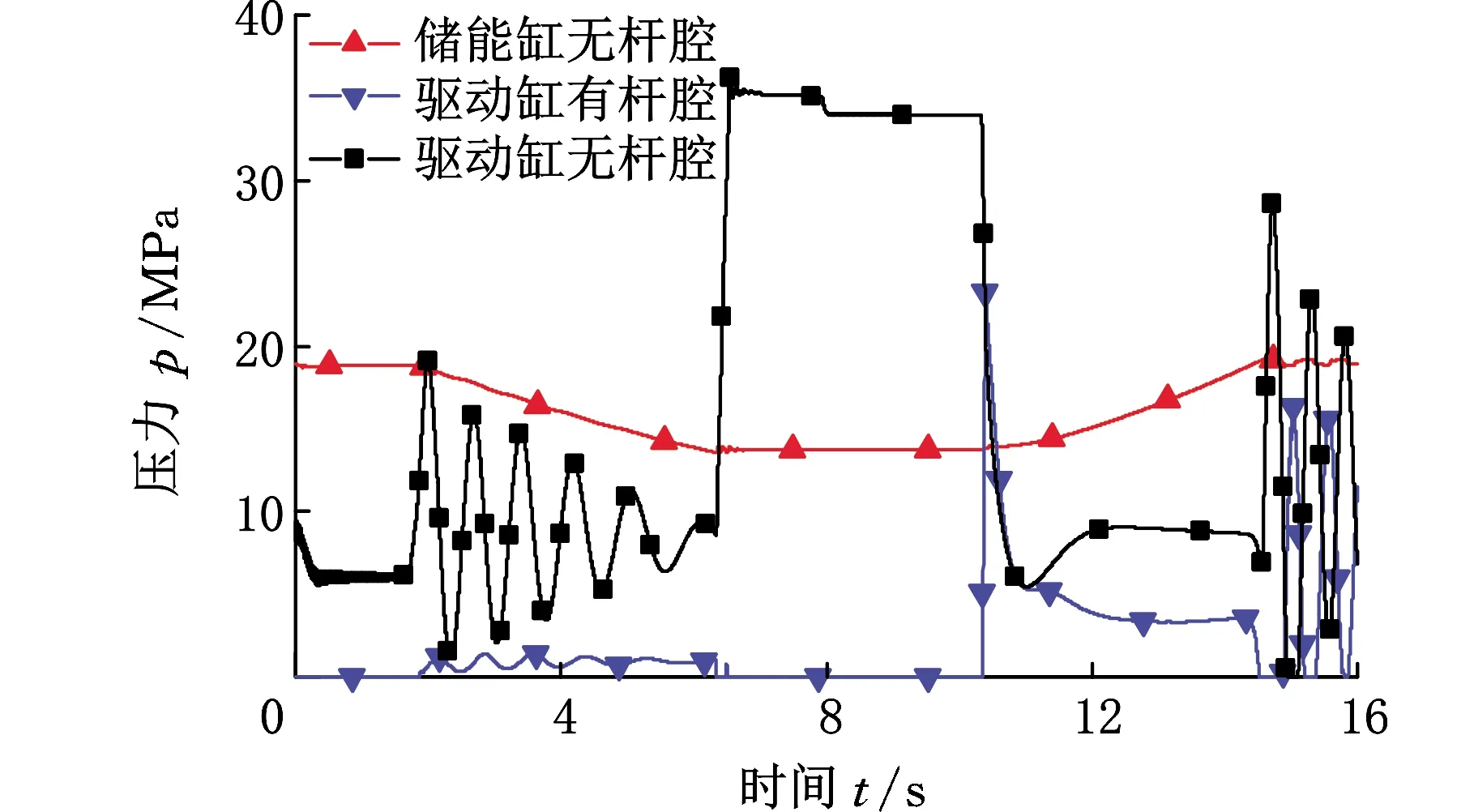
(a)液压缸各腔压力
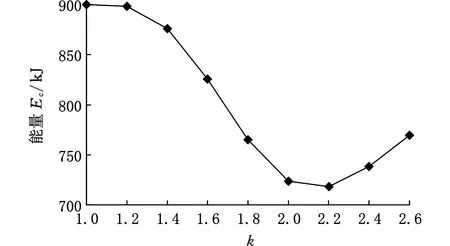
图 6 空载工况下不同k值时液压泵输出能量仿真结果
3.2 各缸无杆腔面积比优化仿真研究
与无势能回收利用单元的机型相比,新系统驱动动臂上升过程中,储能液压缸分担了大部分负载,驱动液压缸若采用原机型尺寸将引起部分驱动能浪费,同时在动臂下降过程中造成更大的回油阀损(即驱动缸无杆腔油液流回油箱时在多路阀处造成的能量损失),故应减小驱动液压缸无杆腔面积。同时相应增大储能缸无杆腔面积,使驱动缸无杆腔与储能缸无杆腔总面积保持不变,以确保系统整体驱动能力不变。
现取k为储能缸无杆腔面积与单个驱动缸无杆腔面积的比值,对k取不同值时在动臂系统空载工况和带载工况下分别进行仿真,并分析k值的变化对动臂工作过程中液压泵输出能量的影响。
图6为液压挖掘机工作装置直臂空载工况下,一个升降循环液压泵的输出能量随k值变化的仿真曲线。图7为液压挖掘机工作装置卷臂带载工况下,一个升降循环液压泵的输出能量随k值变化的仿真曲线。
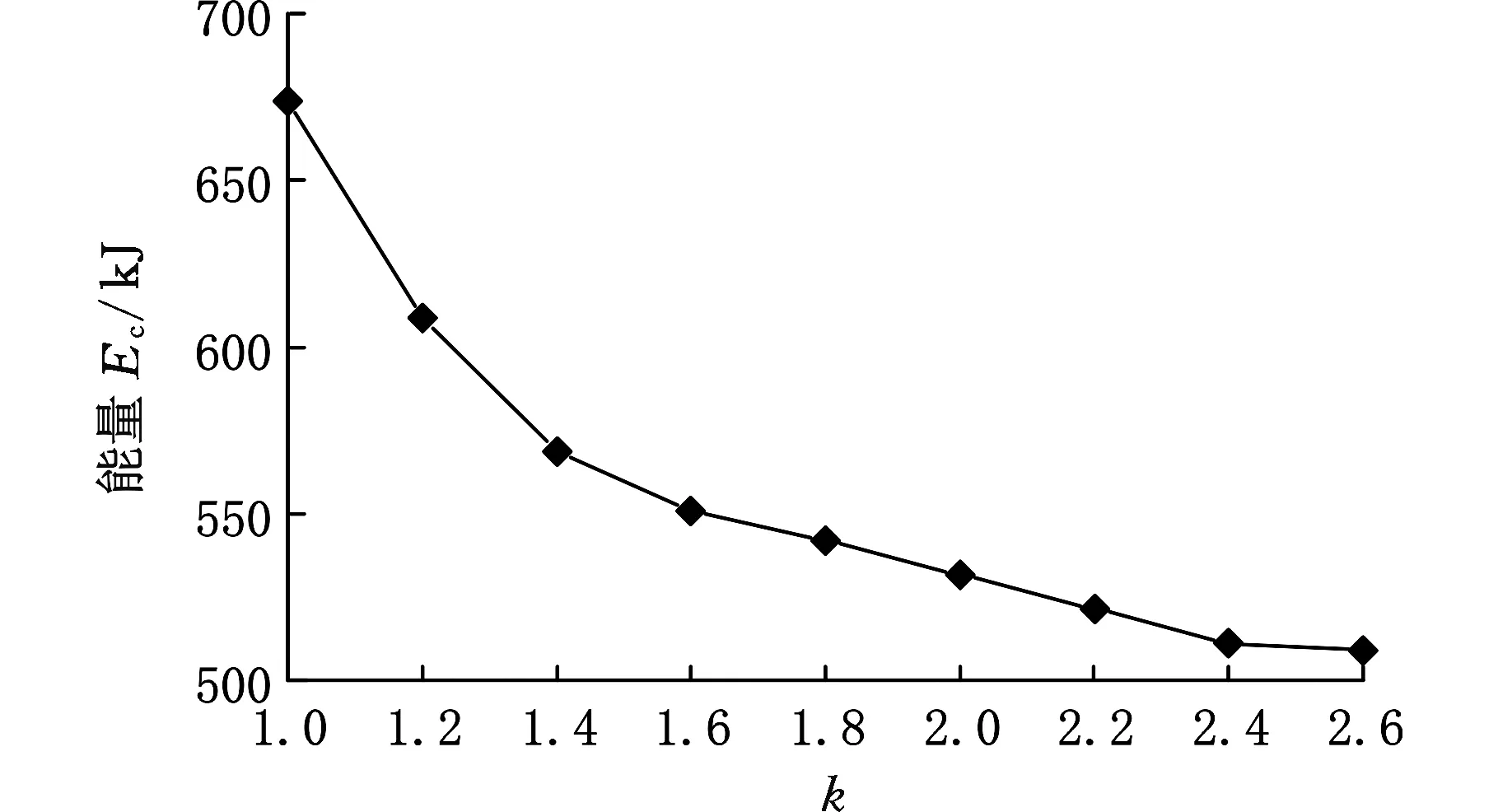
图7 带载工况下不同k值时液压泵输出能量仿真结果
由图6曲线可知,同一工作周期中,当k值增大时,液压泵输出能量呈先减小后增大的趋势。k值取2.2附近时泵输出能量最小,即节能效果最好。由图7曲线可知,随着k值的增大,一个升降过程中液压泵的输出能量呈减小趋势,且速度逐渐变慢。综合考虑空载和带载工况下的能耗情况,k值取2.2时节能效果最好。但由于k值取2.2相较k值取2时,节能效果提高并不明显,且k值越大,相同行程下储能缸容积将增大,与其匹配的蓄能器体积也将增大,综合考虑安装空间和节能效果,取k值为2,即储能缸无杆腔面积为驱动缸无杆腔面积的2倍。
3.3 优化系统仿真
当k值取2时,将多学科联合仿真模型中两个驱动缸无杆腔直径设置为164.5 mm,储能缸无杆腔直径设置为232.7 mm,匹配蓄能器参数后,将液压蓄能器充气压力设为10.2 MPa,蓄能器体积设为400 L,仿真结果如图8所示。
由图8曲线可知,动臂上升过程中两液压泵输出能量为492.7 kJ,液压缸输出能量为382.0 kJ,不考虑摩擦损失,节流损失为110.7 kJ,蓄能器输出能量为608.6 kJ,计算可得蓄能器供能占比约为55.3%。动臂下降时只有泵1供油,液压泵输出能量为239.3 kJ,根据位移变化可计算得到重力势能变化了801.9 kJ,蓄能器存储能量为619.3 kJ,能量回收率约为59.5%。动臂一次举升和下降过程中,液压泵共计输出能量为732.0 kJ,与优化前液气储能系统相比,进一步节省能量253.8 kJ,节能率提高至约46.0%。
(a)液压缸各腔压力
对比优化前后液气储能系统的仿真结果可知,优化后动臂上升阶段系统的节流损失降低21.5%,蓄能器回收能量提高35.2%,相同工作循环系统的节能率由优化前的27.2%提高至46.0%。
4 结论
(1)为提高液压挖掘机动臂势能回收利用效率,研究了储能缸和驱动缸无杆腔面积比不同时,储能缸协同驱动动臂系统在空载和带载工况下的能耗情况。优化面积配比后,实现了动臂势能的高效利用,节能效果显著提高。
(2)以76 t液压挖掘机为例,仿真结果表明:相同工作周期,随着储能液压缸与驱动液压缸无杆腔面积比k的增大,空载工况下液压泵输出能量呈先减小后增大的趋势;带载工况下液压泵输出能量呈减小趋势,减小的速度逐渐变缓。当k值取2左右时液压泵输出能量最小,即节能效果最好。
(3)将储能缸无杆腔面积设计为驱动缸无杆腔面积的两倍时,动臂上升阶段蓄能器供能占比由42.7%提高至55.3%,动臂下降阶段蓄能器能量回收率由39.4%提高至59.5%。相同工作周期系统的节能率由优化前的27.2%提高至46.0%,提升了节能效果。
猜你喜欢
低温与特气(2022年2期)2022-11-26
汽车与驾驶维修(维修版)(2022年8期)2022-09-20
鞍钢技术(2022年3期)2022-06-12
中国金属通报(2021年17期)2021-12-23
中国军转民(2021年11期)2021-12-13
新疆钢铁(2021年4期)2021-03-23
兰州理工大学学报(2021年1期)2021-03-09
科技风(2018年6期)2018-10-21
汽车零部件(2018年4期)2018-05-16
专用汽车(2014年1期)2014-12-10
