基于混合式磁浮平台的解耦及控制分析
2022-06-22 10:47邹圣楠邓舒同陈鹏荣
西南交通大学学报 2022年3期
邹圣楠 ,刘 畅 ,邓舒同 ,刘 英 ,2,陈鹏荣
(1.中国科学院海西研究院泉州装备制造研究中心,福建 晋江 362200;2.福州大学先进制造学院,福建 福州350108)
磁悬浮系统具有无机械接触、无摩擦、无磨损和兼容真空环境等优点,在现代交通、航天航空、精密制造等领域发挥着举足轻重的作用,例如结合真空管道技术的超导磁悬浮列车有望突破1 000 km/h,国内西南交通大学已经完成0~50 km/h的实际动态运行试验[1-5].特别是在当今精密制造领域中,磁悬浮平台能够避免摩擦、产热、生成污染物等问题,可满足精密制造的苛刻要求,因而受到国内外学术界和工业界的广泛关注[6].国内外针对磁悬浮平台技术的研究取得一系列重要进展:文献[7]针对光刻机中的移动平台,设计了一种高精度六自由度磁悬浮平台,其关键的驱动元件是空心线圈,它能够同时提供垂直力和横向平移力; 文献[8]提出了一种新型平面磁悬浮定位结构,其工作原理是分别利用三个悬浮单元和三个推进单元实现平台的悬浮和较大范围的推进,并对系统运行中引起的参数漂移进行了分析;文献[9-10]中研究人员设计一种上小紧凑结构的平面磁悬浮平台系统,其关键单元为两组无铁芯致动器,分别提供悬浮力和驱动力,其优点是减少空间尺寸,并设计了高效的控制器; 除了利用制动线圈提供主动受力,文献[11]针对高精度定位平台,利用永磁体互斥的原理设计了重力补偿结构,极大程度上减小了磁浮平台垂直方向上的线圈损耗和发热问题.在磁悬浮平台运动的研究中,往往需要同时实现悬浮和移动两种动作,因而涉及复杂的解耦问题,若处理不当则直接影响系统的鲁棒性和精度,如何处理解耦问题是磁悬浮系统研究中的重难点.因此,除了磁浮平台本体结构的设计研究,研究人员针对如何更好地解决磁悬浮系统中多自由度耦合的问题进行了多种不同控制算法以及控制规律的研究[12-16].
本文针对磁悬浮定位平台系统中固有的耦合问题,提出了一种利用永磁体之间的被动受力来减少垂直方向上主动控制的设计思路,以此来简化磁浮平台的受力解耦以及多变量控制,避免需要使用多个线圈导致的产热与功耗问题.首先,基于定子为圆环永磁体和电磁线圈,浮子为圆柱永磁体的简单混合斥力式磁悬浮结构,对其进行精确的磁场和磁力计算分析,研究探讨圆环永磁体和圆柱永磁体之间被动悬浮力的稳定区域,并且根据悬浮力计算结果,适当地忽略了浮子在竖直方向上的解耦控制,降低控制复杂度.然后给出了浮子水平方向上的运动方程,最终设计数字控制器并进行相关验证.
1 斥力式磁浮平台的原理及电磁特性
1.1 斥力式磁浮平台的结构和运行原理
本文所研究的混合斥力式磁浮平台系统结构如图1所示,是上、下结构,上方动子由圆柱永磁体和平台组成,下方定子由圆环永磁体、4个电磁线圈构成.圆环永磁体负责提供悬浮力,4个电磁线圈按照一定间距对称分布在永磁圆环内部,位于对角线的两个线圈通过反相串联的方式构成一组,负责提供x方向或者y方向的水平驱动力.圆环中心的传感器用来检测浮子位置.本文所提出的磁浮平台,采用斥力式磁悬浮的方式以及简单的紧凑结构,可较为容易地获得解耦的悬浮力和驱动力,并且圆环永磁体提供的外磁场可保证浮子在圆环轴线中心附近获得稳定的悬浮力,便于对悬浮系统的水平推力及控制稳定性做较为细致的研究.
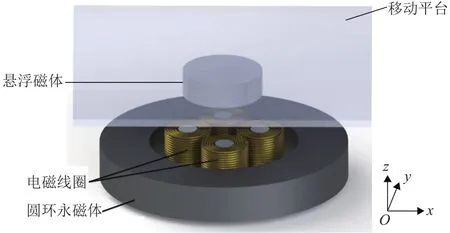
图1 混合斥力式磁浮平台简易结构图Fig.1 Simple structure diagram of hybrid repulsion maglev platform
图2描述了磁浮平台运行和稳定的动态平衡,定子线圈的电流用点和叉表示.圆环永磁体产生的磁场对浮子永磁体形成垂直方向的悬浮力.初始状态下,浮子与圆环共轴,由传感器实时反馈浮子的位置,通过闭环控制系统调节电磁线圈电流使浮子稳定在圆环轴线中心附近.当需要改变浮子在x轴方向上的位置时,控制对应的电磁线圈电流,使电磁线圈产生的磁场和圆环永磁体的磁场进行叠加,最终对浮子产生x方向的推进力,移动过程中,传感器实时反馈上方浮子的位置,闭环控制系统实时改变电磁线圈的电流.到达新的平衡位置后,电磁线圈中的电流值稳定在某一水平附近,以使浮子稳定在新的平衡位置附近.

图2 动态平衡下的悬浮Fig.2 Suspension under dynamic equilibrium
1.2 混合斥力式磁浮平台的电磁特性分析
为研究混合斥力式磁浮平台系统中浮子的受力规律,需要首先求解圆环永磁体的磁场分布,进一步计算浮子永磁体在圆环永磁体磁场中的受力.采用磁荷模型[17-18]或电流模型[19-20]求解永磁体磁场.基于磁荷模型,依据叠加原理,将圆环永磁体的磁场等效为两个圆柱永磁体磁场的叠加,并进一步依据叠加原理,将圆柱永磁体的磁场等效为圆柱上、下两个底面所产生的磁场的叠加.为求解圆柱上底面的磁场,首先推导出磁标量势满足的球坐标下的拉普拉斯方程,利用分离变量法求出磁标量势的解析表达式,进而通过对磁标量势求散度得到磁场表达式,采用同样方法求得圆柱下底面的磁场.在得到圆柱永磁体的磁场后,依据叠加原理得到圆环永磁体的磁场,最后对浮子在整个磁场中的受力进行精确的计算,结果与有限元仿真计算结果和实验测量相符.在此基础上,研究了圆环永磁体提供的被动悬浮力在中心点周围的稳定区域,为浮子移动范围的设计提供理论依据.
1.2.1 圆环永磁体磁场的解析计算及验证
圆环形永磁体的磁场分布可以看作两个圆柱永磁体的磁场利用矢量叠加原理得到.根据叠加原理,先分别求出圆柱永磁体 α 和 β 在外部空间任意一点P的磁场Hα和Hβ,两者相减即可得到圆环永磁体的总磁场[21]:H=Hα-Hβ,如图3 所示.

图3 圆环与圆柱永磁体之间的等价关系Fig.3 Equivalence relation between ring and cylindrical permanent magnet
圆柱形永磁体的磁场通过磁荷模型进行求解.磁荷模型将磁体产生的磁场看作是由密度为 ρm的磁荷分布产生的.根据磁荷模型,永磁体外部空间任意一点P的磁标量势为

式中:M为 永磁体的磁化强度;S′为 永磁体表面积;τ′为永磁体体积;r为原点O指向点P的空间向量;r′为原点O指向磁荷微元的空间向量;n为 永磁体外表面法向单位矢量, ∇ ·M表示对M求散度;磁荷面密度 ρmS′和磁荷体密度 ρmτ′定义如式(2).

计算得到um后,对um求梯度可得到磁场强度为

如图4所示为轴向均匀磁化的实心永磁圆柱,上表面N极,下表面S极,在均匀磁化下,M=Br/μ0为常矢量,其中:Br为圆柱永磁体的剩磁;μ0=4π×10-7H/m,为真空中的磁导率.

图4 沿轴向磁化的圆柱永磁体Fig.4 Axially magnetized cylindrical permanent magnet
由于M=Br/μ0为常矢量,因此有 ∇ ·M=0 ,故:

式中:um+、um-分别为圆柱永磁体上表面积和下表面积磁荷产生的磁标量势.

式中:a为永磁体半径;边界条件为

采用分离变量法求解[22]得到

式中:Pl(x)为l次的勒让德(Legendre)多项式,如式(10).

在球坐标系下,圆柱永磁体上表面磁荷产生的磁场为

同理,可以求出圆柱永磁体下表面磁荷 ρmS′-产生的磁场H-,根据叠加原理,圆柱永磁体在外部空间任意一点P的磁场为H=H++H-.进一步,依据叠加原理,根据图3所示的思路,可求出圆环永磁体在外部空间任意一点P的磁场.点P处的磁感应强度B=μH,其中 μ 为永磁体所在空间磁介质的磁导率.
为了验证解析方法的正确性,本文选取铁氧体材料的圆环永磁体为样本,对其进行磁场计算和实验测量,圆环永磁体特征参数为:外圈半径为5 cm,内圈半径为3 cm,高度为1.5 cm,剩余磁通密度Br=0.24 T.本文利用 COMSOL Multiphysics® 通过有限元方法计算得出圆环永磁体的磁场分布.首先建立圆环永磁体的三维模型,几何模型的物理场由剩余磁通密度的具体数值定义.然后进行适当的网格划分,通过参数扫描的方法计算圆环永磁体周围的磁通密度.此外,本文利用高精度磁场扫描平台,沿x轴和z轴进行圆环永磁体的磁场测量(Bx,Bz),最终3种方法得到的磁场结果比较如图5所示.
由图5可知:3种方法得到的结果基本一致,其中解析和仿真方法计算得到的不同高度处磁场应强度分量曲线基本重合,两者之间的最大误差仅为1.2 mT;测量值与两种计算方法得到的结果略有不同,最大绝对误差为4.0 mT,相对误差不超过15%,误差可能来自测量精度的不足和永磁体材料本身的工艺误差.该结果证明了所提出解析方法是一种用于计算圆环永磁体磁场的高精度方法.
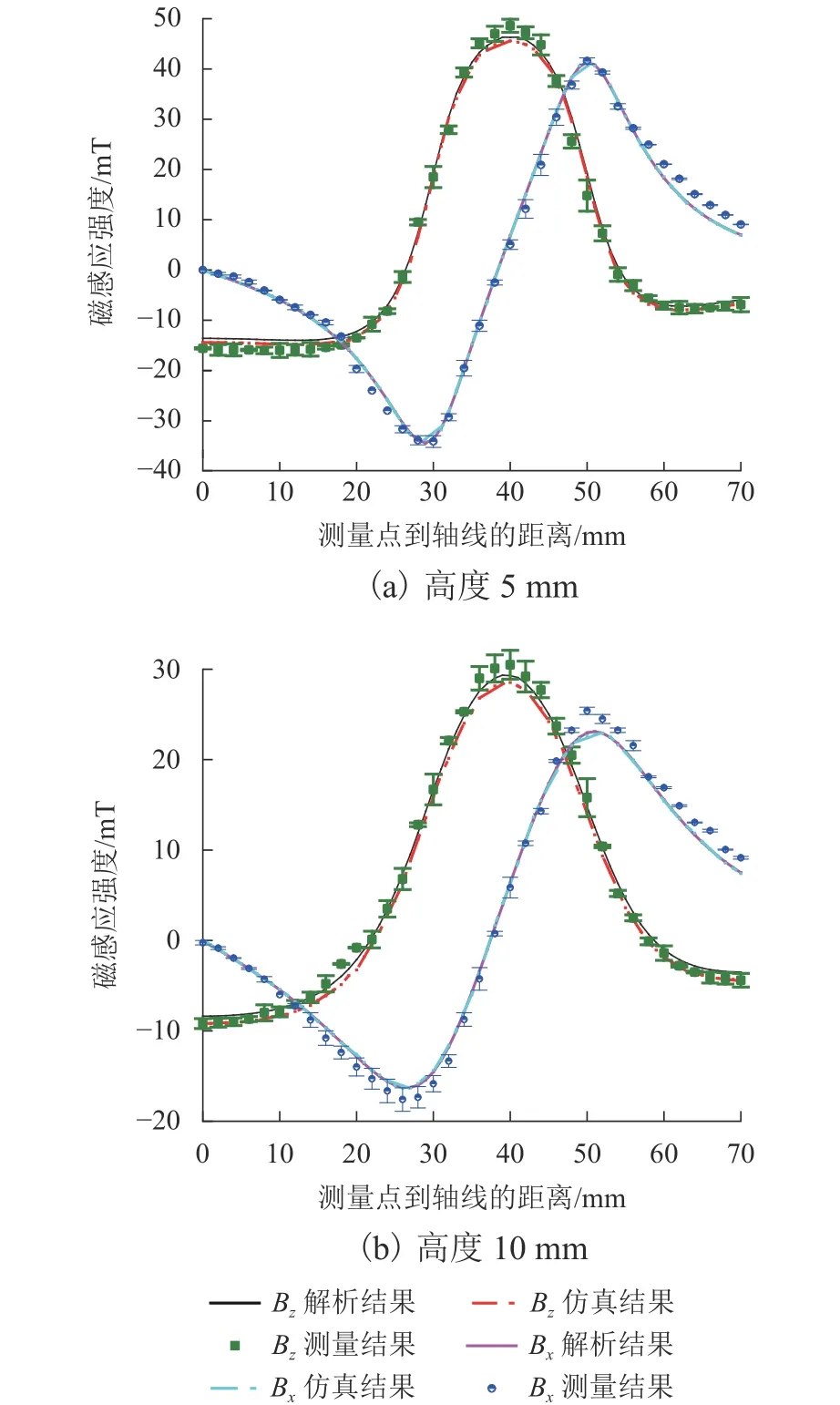
图5 不同高度处圆环永磁体的磁感应强度分布Fig.5 Magnetic flux density distribution of ring permanent magnets at different heights
1.2.2 圆环永磁体的磁力计算
基于磁荷模型计算永磁体之间的相互作用力,圆柱永磁体在圆环永磁体产生的外部磁场Bex中的受力可以通过式(11)求得[23].

为进行对比验证,利用有限元方法计算永磁体之间的相互作用力,其基本思路是利用空间中的总磁能间接计算得到磁力大小,具体方法为:控制两个磁体之间的相对距离,计算出每一步固定移动距离l0的总磁能Em;然后将总磁能的变化量 ΔEm除以固定移动距离l0计算出每一步移动对应的磁力F=-ΔEm/l0.
本文选取钕铁硼材料的圆柱永磁体作为浮子,几何参数为:半径2 cm,高度0.5 cm,剩余磁通密度Br= 0.95 T.选取上小节中的圆环永磁体作为定子,进一步采用与文献[11]类似的悬浮力测试平台,测量与圆环永磁体共轴的圆柱永磁体沿圆环轴线方向移动所受的悬浮力,并与解析计算和有限元计算进行对比, 如图6所示,
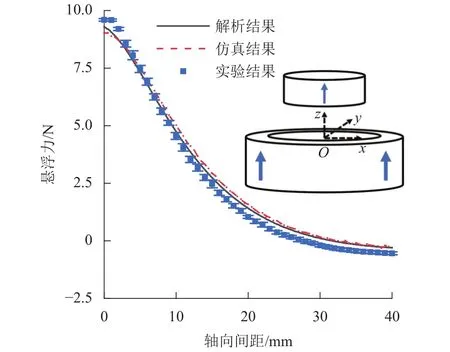
图6 悬浮力随磁体之间轴向距离的变化Fig.6 Variation of levitation force with axial distance between magnets
由图6可知:解析结果和仿真结果基本吻合,两者最大误差为0.28 N,相对误差不超过6%;测量结果与两个计算结果曲线趋势基本相同,整体略小于计算值,最大误差为0.58 N,相对误差不超过14%;测量结果除了自身的测量误差,差异来源可能与磁铁的实际形状和磁铁磁化不均匀性有关.
1.3 被动悬浮力的分析
在所提出的混合斥力磁浮平台系统中,浮子移动的前提是被动悬浮力在一定水平范围内不发生变化.本节针对在不同悬浮高度处,圆环永磁体上方浮子受力的规律进行探究,得到被动悬浮力在水平方向上变化较小的稳定区域.图7为不同高度处,被动悬浮力随水平位移变化的计算结果.
从图7中可以看出:随着悬浮高度的升高,悬浮力逐渐减小; 在水平位移 ±10 mm范围内,悬浮高度越小,被动悬浮力的变化越缓慢.本文以同一高度处被动悬浮力的变化量与轴线处最大悬浮力之比k为标准,以此衡量悬浮高度对被动悬浮力变化的影响程度,如式(12).

图7 被动悬浮力在不同高度处随水平位移的变化Fig.7 Variation of passive suspension force with horizontal displacement at different heights

式中:Fz_0为轴线处悬浮力;Fz_x为距离轴线一定距离处的悬浮力.
通过计算对比发现,k的变化随着悬浮高度的减小而变换缓慢.如果以k取值10%作为参考,在不同高度(10、15、20、25 mm)处满足k≤10% 的水平范围分别为 ±8、±6、±5、±4 mm,表明随着悬浮高度的降低,被动悬浮力在水平方向上能够保持相对变化较小的范围逐渐增大.
2 磁浮平台的数学模型
2.1 被控对象受力解耦
图8为悬浮物体的受力情况,总体可分为:来自圆环永磁体的被动受力Fm、来自电磁线圈通电后的主动受力Fe、浮子本身的重力mg.因此实现浮子在一定悬浮高度处的线性运动包含两个方面:1) 垂直分量Fm_z和Fe_z的合力对抗浮子重力mg使之稳定悬浮;2) 水平分量Fm_x和Fe_x的合力驱动浮子进行线性运动.因此可以列出
张奎良批判了对于共产主义的经验性理解和认识,依据马克思哲学文本,提出共产主义是实体境界、形上境界和实践境界的三维合一。其中实体境界其核心内容是完善的社会制度;形上境界即哲学共产主义境界,其核心是人的彻底解放和对人的终极关怀;共产主义的实践境界是把现实斗争和共产主义未来结合起来的现实运动。[10]

图8 浮子受力分析Fig.8 Force analysis of float

式中:Fz为 圆环永磁体和电磁线圈作用于浮子的竖直分量之和;Fx为 圆环永磁体和电磁线圈作用于浮子的水平分量之和.
一般情况下,实现磁浮平台的稳定移动需要同时实现竖直方向和水平方向的受力平衡,并设计二维的控制器,分别控制竖直方向和水平方向的运动平衡.如果能够实现在一定范围内Fz+mg≈0 ,则悬浮物体在该范围竖直方向是稳定的,此时意味着不需要通过控制手段来平衡的竖直方向上的受力.本文中浮子重力为0.92 N,根据悬浮力计算和测试结果(图6),对应浮子的悬浮高度为23 mm,因此针对这一高度位置的被动悬浮力与水平位移的变化规律进行了分析,如图9所示.

图9 浮子垂直方向受力与水平位移的关系Fig.9 Relationship between vertical force and horizontal displacement of float
图9所示的计算结果表明:在以圆环永磁体轴线为中心,4 mm为半径的水平区域内,被动悬浮力随浮子水平位移变化的最大值为0.091 N,仅为浮子本身重量的10%,对悬浮高度的影响仅在1 mm范围内;当电磁线圈通电后,电磁线圈产生的竖直方向的分量Fe_z与Fm_z的变化趋势相反,且变化幅度近似相等,导致浮子所受到的竖直方向上合力最大值变化仅为0.05 N,约为浮子自身重量的6%,对悬浮高度的影响仅在0.2 mm范围内;浮子在 ±4 mm水平范围内的竖直方向上的合力Fz始终约等于mg.综上分析,针对本文所提出的混合磁浮平台结构及元件参数,在 ±4 mm水平范围内,可以简化忽略竖直方向上浮子的运动方程.该水平范围与元件的几何参数以及永磁体的剩余磁通密度有关,本文暂不进行分析,将在后续的工作中展开研究.
2.2 水平方向数学模型的推导
根据对浮子的受力分析,可以写出磁浮平台水平方向的运动方程为

式中:f为外界干扰力;l为浮子沿x轴位移.
Fm_x和Fe_x都具有明显的非线性特性,利用有限元仿真软件,通过仿真计算得到力与位移之间的数据,然后采用多项式拟合的方法确定相关力分量的表达式为

因此通过拉普拉斯变换得出磁浮平台水平方向的传递函数为

因为,传递函数中存在一个右半平面极点,所以本质上系统是不稳定的,需要使用超前补偿手段来进行控制调节.
3 数字控制器设计及验证
3.1 控制器设计
针对所研究的混合斥力式磁浮平台,本节利用数字控制器实现系统的模数转换、控制算法的实现、PWM (pulse width modulation)波产生以及控制输出电压方向等功能,此外还包含了前级的霍尔传感器放大电路设计以及后级驱动芯片的连接等外设模块.本文实现浮子水平运动的方法,是利用MCU(microcontroller unit) 芯片,依次改变浮子的位移参考值,以小间距步进的方式实现浮子的水平位移.数字控制器如图10所示.

图10 数字控制器结构Fig.10 Digital controller structure diagram
前级位移传感器检测浮子的水平位置,输出放大后的电压信号,然后利用MCU芯片进行模数转换,并与参考位置的数值作比较得出误差值,再经过控制算法的计算输出对应占空比的PWM波形,最后控制驱动芯片产生对应的线圈电流,包括大小和方向,生成对应的驱动力,实现浮子的移动.
本节利用STM32F407ZGT6高性能的MCU进行编程,实现斥力磁浮平台的数字控制.STM32微处理器芯片的软件部分主要对以上功能进行算法设计,控制程序的主程序结构图如11所示.

图11 主程序流程Fig.11 Main program flow diagram
基于前文所述的磁浮平台水平方向上的运动方程,本文设计了一个超前校正PD控制环节,并在STM32微控制器芯片上实现.值得注意的是,超前矫正控制会改善磁浮平台系统的快速性和稳定性,同时也会存在微小的稳态误差.
3.2 实验验证
本节进行仿真和实验验证,评估混合斥力式磁浮平台系统的静态性能和动态性能.图12显示了系统的实验平台结构:传感器检测浮子的位移,经过信号处理后通过A/D转换传输到STM32控制器进行控制计算,最后输出的控制信号实现电流放大驱动线圈,产生对应的电磁力作用于浮子产生移动.上位机用于实时监控位移数据以及修改参考位置,电流监测用于实时监控线圈电流的变化.

图12 实验平台结构Fig.12 Experimental platform structure diagram
图13为浮子对1.0 mm位移信号的阶跃输入的闭环响应,由图13可知:仿真和实验跟随曲线快速稳定并且几乎没有超调,实验结果的浮子跟随输出稳态误差为0.106 mm,稳定时间仅为0.1 s;浮子自身位置在稳态状态下存在轻微震荡现象,其误差最大不超过0.233 mm.
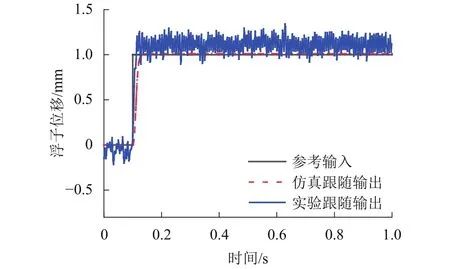
图13 位移为1.0 mm的阶跃轨迹跟踪Fig.13 Step trajectory tracking with 1.0 mm final value
从已有研究来看[12],使用步长的方法控制悬浮物体移动,步长越小,超调越小[24-25].本文设定步长为0.5 mm的响应步进控制,研究浮子运动效果.图14为浮子在预定时间间隔内响应4步输入的轨迹演变.从结果可知:仿真和实验的输出能够快速稳定地跟随参考输入,没有超调现象的产生.因此利用分步移动实现浮子的水平运动是可行的.但是随着总位移的增加,实验结果的稳态误差也逐渐变大,位移从0.5~2.0 mm对应的稳态误差分别为0.145、0.224、0.236、0.294 mm.因此如果对稳态误差有精确的要求,则需要改进控制算法进一步消除稳态误差.

图14 步长0.5 mm、位移为2.0 mm的轨迹跟踪Fig.14 Trajectory tracking with 0.5 mm step length and 2.0 mm final value
4 结 论
本文基于利用永磁体之间的被动受力来减少垂直方向上主动控制的设计思路,针对永磁体和电磁线圈组成的混合斥力式磁悬浮的结构,对其进行了精确的磁场和磁力计算分析,并通过受力解耦建立了水平方向上的数学模型、设计了数字控制器以及相关验证,得出了以下结论:
1) 针对永磁体和电磁线圈组成的混合斥力式磁悬浮的结构,对其进行了精确的磁场和磁力计算分析,结果表明解析法、有限元仿真法和设计测量结果相同,证明了解析法和有限元仿真法的正确性.
2) 充分研究探讨了圆环永磁体和圆柱永磁体之间被动悬浮力的稳定区域,发现当选择悬浮高度为23 mm时,水平范围 ± 4 mm内,浮子的被动悬浮力变化极小,且在该被动悬浮力稳定的区域内,浮子垂直方向的位移变化不超过0.2 mm.
3) 建立了浮子水平方向的运动方程,并利用数字控制器取代一般的控制方法和部分功率放大电路,具有电路简单且集成度高、成本低、程序的可移植性好等优点.针对控制算法的仿真结果表明,系统可以稳定悬浮且水平移动.
目前作者所在的课题组正有序推进大范围线性运动的研究和建设,针对超前控制算法进行改进,在提高响应速度和稳定性的同时消除稳态误差.下一步将利用实验平台搭建模型并验证准确性.
猜你喜欢
中国海洋大学学报(自然科学版)(2022年1期)2022-11-09
小猕猴学习画刊(2022年6期)2022-06-30
小学生作文·小学低年级适用(2022年5期)2022-06-26
计算机仿真(2022年1期)2022-03-01
河北工业大学学报(2021年6期)2021-02-21
科技视界(2020年19期)2020-07-30
作文周刊·高二版(2018年26期)2018-10-24
小天使·二年级语数英综合(2017年10期)2017-10-31
小学阅读指南·低年级版(2017年1期)2017-03-13
三联生活周刊(2016年43期)2016-10-28