
无人作战艇在未知海域避碰规划算法研究
2022-06-17 10:30马金伟
指挥控制与仿真 2022年3期
窦 强,马金伟,韩 昱
(1. 海装驻连云港地区军事代表室,江苏 连云港 222061; 2. 江苏自动化研究所,江苏 连云港 222061; 3. 连云港中等专业学校机电工程系,江苏 连云港 222061)
无人水面艇(Unmanned Surface Vehicle,USV)以船舶作为运载平台,以其跨介质存在、机动灵活、被发现和攻击概率小、可避免复杂海况下因长时间执行任务导致人员疲劳等优势,作为跨域协同、马赛克战等新军事理论的重要支撑装备,正受到美、英等西方军事科技强国的高度重视,并纳入其国家发展规划,进入高速发展时期。无人艇在作战领域的使用模式被逐渐拓展,国内外研制出一批综合能力突出的无人艇,如以色列的“海上骑士”无人艇装备了“长钉”导弹、美国海军“幽灵舰队霸王”的“游骑兵”成功发射了SM-6导弹、英国Madfox无人艇发射“弹簧刀300”巡飞弹等;国内珠海云洲发布了“瞭望者Ⅱ”察打一体导弹无人艇、中国船舶集团展出了JARI-USV多功能作战无人艇。
随着无人艇发射武器试验的开展和技术的不断成熟,由无人艇自主执行远程目标打击任务逐渐成为可能,自主航行是实现无人艇遂行导弹打击作战任务的前提条件和必要基础,从而自主航路规划已成为国内外研究的热点。近年来,在无人艇航路规划解决方案方面有了大量的实践和验证,全局航路规划算法有Dijkstra算法、A算法、蚁群算法、遗传算法等,局部规划算法有人工势场法、速度障碍法、向量场直方图法等。以上算法均有特定的适用场景及前提条件,优缺点比较如表1所示。
1 相关算法
作为以智能化作战为主要任务形式的无人艇,依托自身传感器探测感知信息实现航路规划和自主航行控制是一项基本能力需求,因此要求规划算法不依赖环境先验知识、反应迅速、实时性好。通过表1的规划算法优缺点比较,本文基于艇载导航雷达回波数字视频信息,对无人艇近区进行栅格化,以无人艇安全航行需求确定栅格大小,以雷达回波信息控制单元栅格属性,采用改进的人工势场法,快速进行避碰规划,从而实现无人艇在陌生海区自主航行。
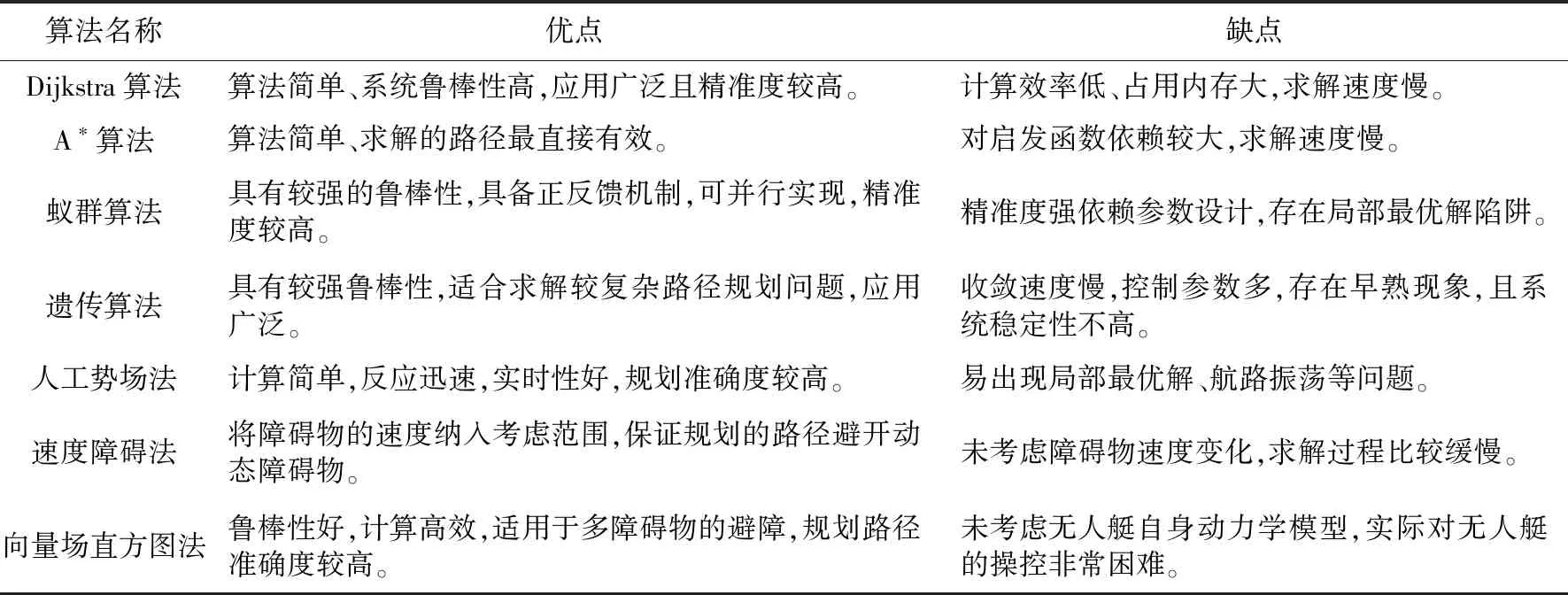
表1 规划算法优缺点比较
1.1 栅格法

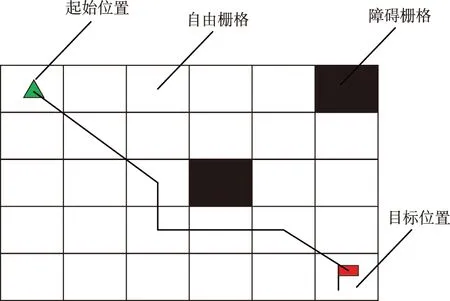
图1 环境栅格化
将栅格表示为
=(Left,Top,Right,Bottom,Value)
(1)
其中,Left、Top、Right、Bottom表示第行列栅格的左上和右下位置信息,Value表示该栅格障碍置信值,值越大,表示该栅格不可通行的可能性越确定。
1.2 人工势场法
根据Khatib在1986年提出的人工势场法思想,将无人艇近区海域模拟为人造势场区域,以目标点为中心构建全局引力势场,引力大小与阵位点距离成正比,即距离越远,引力越大;以碍航物点构建局部斥力势场,斥力大小与碍航物点距离成反比,即无人艇距离碍航物越近,斥力越大,碍航物所在位置点斥力无穷大,从而避免无人艇与碍航物的碰撞。无人艇进行自主航行时,受到目标点的引力和碍航物的斥力综合作用,进而实现自主避碰航行,运行原理如图2所示。
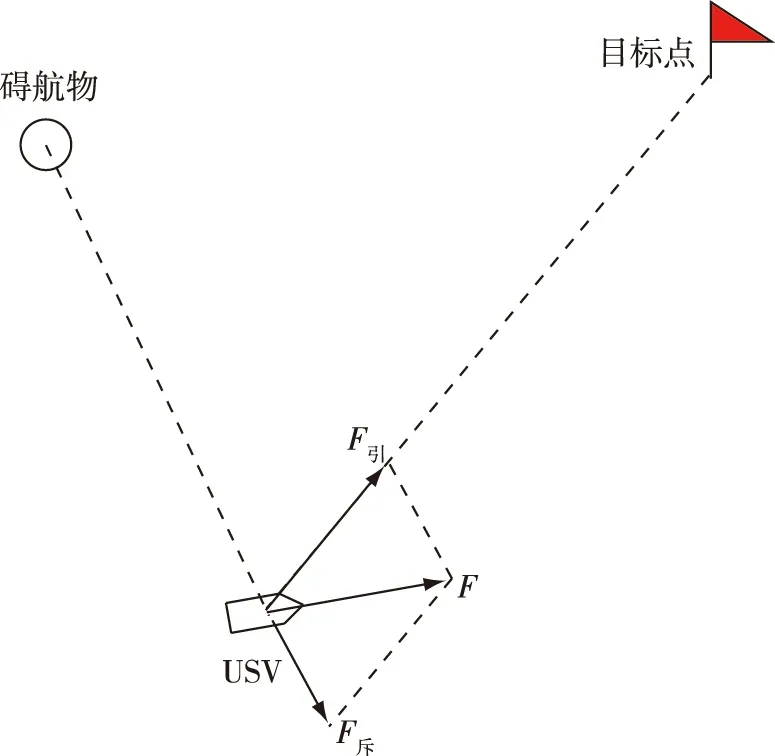
图2 人工势场法原理图
无人艇环境栅格中,势场函数定义为
()=()+()
从而无人艇所受的力为
()=()+()
(2)
其中,为无人艇在环境栅格中所处的栅格(栅格环境中心点),()为栅格的势场函数,()为引力势场函数,()为斥力势场函数,()为无人艇所在栅格的受力,()为无人艇在栅格受到目标点的引力,()为无人艇在栅格受到碍航物斥力的合力。
目标点对无人艇产生的引力场为全局势场,且与无人艇到阵位点距离的平方成正比例关系,引力的方向为无人艇指向阵位点,且距离越大,引力越大。碍航物产生的斥力势场为局部势场,只有在影响无人艇安全航行的区域才具有势场,只有在碍航物影响范围内,无人艇才会受到该碍航物的斥力作用。
传统的人工势场法对栅格化雷达回波视频的高密度和不规则,极易出现规划发散;当引力方向和斥力方向之间的夹角大于一定角度时,极易陷入局部最小点;在通过狭长水道时,易出现航向震荡现象。因此需对传统人工势场法进行改进,以满足自主航行需求。
2 无人艇近区环境构建
2.1 雷达回波信息解析
根据雷达探测原理,雷达波照射到物体表面反射到雷达接收机,经信号处理后形成回波,周期内接收的所有回波信号形成了可视的雷达视频信息。雷达视频数字化可采用以本艇为中心的射线表示某个方位的视频数据,再进行离散化,即第个方位的视频表示为
=(,,0,1,2,…,)
(3)
其中,表示视频方位编号,为实时艏向,表示方位上第处的回波强度,范围为[0,15],为方位采样点数。
第个方位的第处回波对应的直角坐标为
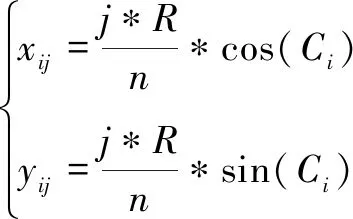
其中,=(+*) mod 360,为雷达方位分辨率,为雷达量程。
根据无人艇导航雷达回波视频数字化设计,=1 024,从而雷达回波视频图像绘制为2 047*2 047像素的bmp图像,雷达单帧视频图像如图3所示。
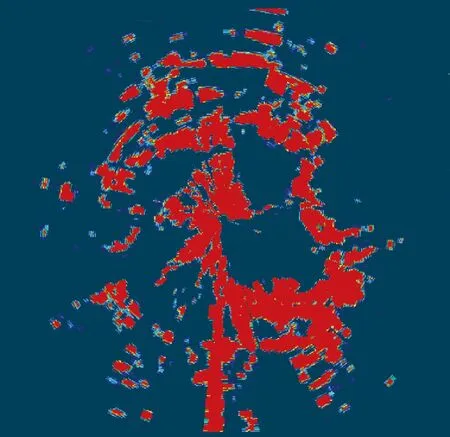
图3 导航雷达原始视频图像
2.2 环境构建
1) 雷达图像二值化
雷达回波图像是一种16色灰度图像,对于以避碰航行为目的的图像处理,仅需识别点为障碍点或自由点,为降低图像处理复杂度,提高图像处理速度,将雷达图像进行二值化转换。
假设灰度值为的像素占总体像素的比例为(),初始图像阈值为,计算回波像素点比例和自由区像素点比例,以及回波区域的平均灰度和自由区域的平均灰度。


计算类间方差最大值:

则为雷达图像二值化转换阈值。
假设原始图像各像素点值为(,),则二值化后图像为
其中,(,)表示二值化后图像各个像素点的值,为阈值(0≤≤255)。
针对图3进行二值化处理,=142,处理输出图像如图4所示。

图4 无人艇雷达二值化图像
2) 雷达图像闭运算
由于受雷达探测分辨率、噪点等因素影响,雷达图像可能会出现毗连区域的回波缺失或邻近区域断裂,均可能会规划出可通行航路,消除不适用于无人艇通过的微小间隙,根据图像形态学处理方法,对二值化雷达图像进行闭运算操作。
采用7*7的结构元(如图5a)所示),对图像进行闭运算,即:·=(⨁)。

腐蚀操作:={|[()∩]=ø},是对膨胀后图像的细化和平滑操作。
对二值图像的处理结果如图5b)所示。
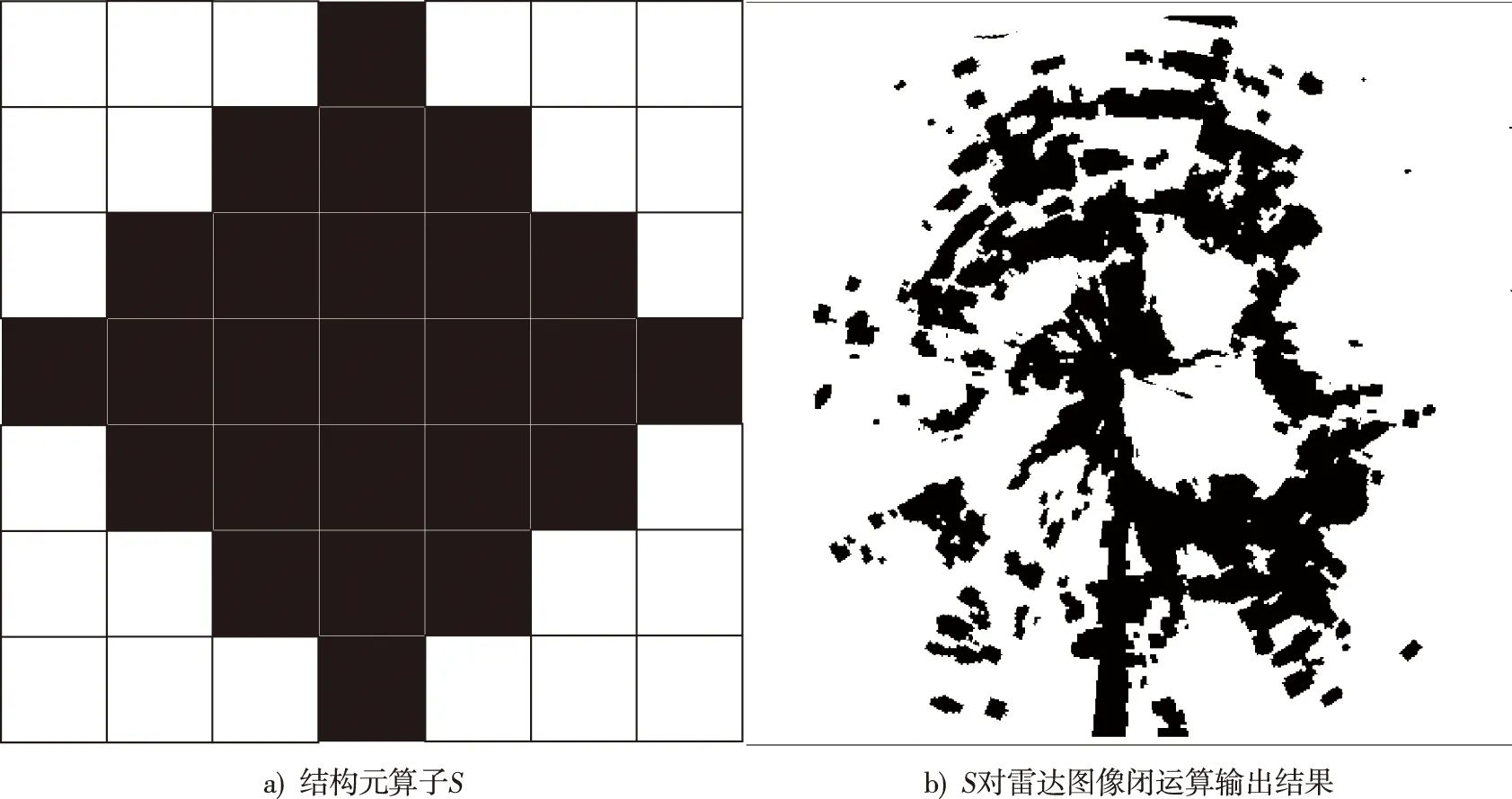
图5 无人艇雷达图像闭运算输出图像
3) 基于雷达回波图像的环境构建
针对方位采样点为的雷达图像,图像像素值为(2*-1)*(2*-1)个,雷达量程为,则每个像素代表的距离为。表示雷达图像闭运算输出图像,处的像素值,则图像上的点可表示为

(4)
构建2*2环境栅格,栅格大小设为*,则相对于中心点(无人艇所在位置),根据式(1),第,处栅格参数为
=(*-,*-,*(+1)-,*(+1)-,)
(5)
的初始值为0,值越大,表示该栅格内雷达回波点越多,栅格区域内障碍物的密度越大。

(6)
对按照式(4)~(6)对图5b)进行栅格化,得到基于雷达图像的无人艇近区环境栅格如图6所示。
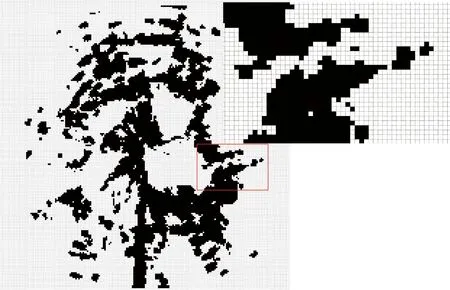
图6 基于雷达图像的栅格化环境
3 避碰规划算法
3.1 改进人工势场法
根据无人艇特性,无人艇在自主航行过程中根据作战任务设置恒定航速,故人工势场中受恒定引力的作用,即
=
无人艇所受斥力为势场区域内障碍栅格对无人艇斥力的合力,因此,斥力的计算转化为某时刻障碍栅格的提取。
定义(无人艇所在栅格)与之间的距离和方位分别为:

(7)
(8)
因此,某时刻对无人艇有斥力作用的障碍栅格集:
=(,,…,)满足条件
(9)
其中,为无人艇雷达周期内的最大转向角。
由于雷达回波图像栅格化后,障碍栅格成片出现,直接采用中元素计算斥力,同一方位会出现多个障碍栅格对无人艇有斥力作用,存在无效计算且极易出现无解现象。实际情况下,无人艇只需考虑规避该方位上距无人艇最近的障碍栅格,即需从中提取面向无人艇的障碍栅格的边缘栅格′,执行步骤如下:
步骤1:根据式(7)、式(8),=((,),(,),…,(,));

步骤4:重复步骤2,直至=Ø。


其中,为障碍栅格作用距离,为该栅格作用力的增益系数,栅格区域中有个有效栅格。
根据式(2),无人艇所受合力为=+。
针对图6栅格化环境,采用上述改进的人工势场法进行航路规划,规划结果如图7所示,可见规划结果不一定全局最优,若设置过大,在栅格化雷达图像上常出现障碍栅格密集区域,易导致无解现象;试验中设置=5,即障碍栅格影响区域为其周围5个栅格,在空旷区域,USV仅受到目标点引力作用,航向指向目标点,直到受到障碍栅格斥力作用时改变航向。栅格化图像输入到规划结果输出用时仅0.05 s,远小于雷达图像更新周期。该算法可实现基于雷达图像的避碰规划目标,但为局部规划,不一定达到全局最优。
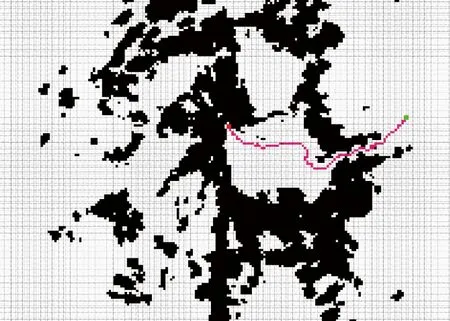
图7 栅格环境人工势场法规划结果
3.2 航速航向输出
由于导航雷达图像的抖动、回波信号的密集、噪声的干扰等因素影响,不可避免地出现斥力方向剧烈变化或局部最小点情况。航向变化剧烈会导致无人艇推进效率降低,发生海豚运动,局部最小点会导致无人艇迷失航向,因此,航路规划执行过程中需要对这两种情况进行处理。
针对局部最小点现象,主要采用增加引导目标点方法,当引力方向和斥力方向夹角大于某一个大角度时(如170°),在无人艇向目标点连线方向的45°方向,个栅格处设置一个引导点,直至无人艇走出局部最小点。
针对输出航向剧烈震荡情况,在模型向控制机构输出期望航速航向前,增加航向过滤器,平滑航向变化,控制安全航速。模型解算输出期望航向为,则无人艇下一周期的目标航向为
无人艇速度为

其中,与为无人艇巡航速度和最小速度,无人艇转向越小,目标航速越接近巡航速度。
4 模型验证
通过将基于雷达视频栅格化的人工势场模型嵌入无人艇艇载控制系统,设置导航雷达方位采样点数为1 024,分辨率为2 048,天线周期为1 s,设置目标点。艇载控制系统接收雷达回波数字信号,实时进行雷达回波图像生成、图像闭运算、近区环境栅格化构建;基于改进人工势场法的航路规划,输出航速航向引导无人艇自主航行至目标点。模型接收雷达数字视频信息到解算输出执行航速航向平均时间为0.12 s,模型引导无人艇自主出港池航迹如图8所示,整体看航迹较为平滑,航向较为稳定,无震荡现象。

图8 模型引导无人艇自主航行出港池试验航迹图
5 结束语
针对无人艇在未知海域执行任务中的自主避碰规划问题,提出了一种基于雷达回波图像栅格化的环境构建方法和改进的人工势场法,实现了在陌生海域无人艇自主航行避碰模型,试验结果表明:
1) 所设计的算法在栅格化导航雷达回波图像支持下,能够快速规划出到达目标点的航路,属于局部规划;
2) 所设计的算法在真实海况(3级以下),无对抗目标时可用;
3) 通过设定障碍栅格作用范围,限定障碍栅格区域,提取障碍栅格边缘,有效减少计算量,提高实时性,能够满足雷达图像实时处理需求。
因栅格化对障碍栅格扩张因素,该算法对小间隙密集目标环境、窄航道不适用。针对动态障碍物规避、高海况下环境适应能力、有精度需求的航路规划等其他应用场景需求,需进一步开展算法研究和试验探索。
猜你喜欢
中国科技纵横(2020年9期)2020-10-09
教学与管理(小学版)(2020年5期)2020-07-16
移动通信(2019年2期)2019-03-27
大科技·C版(2018年11期)2018-10-21
师道(2018年6期)2018-07-16
科技视界(2016年19期)2017-05-18
兵器知识(2016年11期)2016-11-03
儿童故事画报·发现号趣味百科(2016年6期)2016-08-19
第二课堂(课外活动版)(2015年4期)2015-10-21
中学英语园地·教研版(2008年1期)2008-03-20
