
基于CGRU-SVM的星载SAR工作模式识别方法*
2022-06-17 10:30张雅声尹灿斌方宇强
指挥控制与仿真 2022年3期
贺 俊,张雅声,尹灿斌,方宇强
(航天工程大学,北京 101416)
星载合成孔径雷达(Synthetic Aperture Radar,SAR)是一种主动式微波成像传感器,通过发射宽带调频信号和脉冲压缩技术实现距离向高分辨率,通过方位合成孔径技术获得方位向高分辨率。相较于光学和高光谱成像,SAR主动发射微波信号,可穿透云、雾、尘等,同时不受光照条件影响,在恶劣条件下也可正常成像,因而具备全天时、全天候成像观测能力,在军事领域得到了较为广泛的应用。为有效应对非合作星载SAR卫星可能对我方产生的威胁,需要掌握其包括工作模式、发射功率和脉冲重复频率在内的参数,其中,快速准确鉴别星载SAR的工作模式是关键环节,因而,具有十分重要的研究意义。
当前,针对星载SAR工作模式的识别问题,主要采用传统信号分析方法,首先需提取SAR信号的距离参数、多普勒参数和接收功率图等特征,再结合星载SAR卫星的轨道参数,进而判别星载SAR的工作模式,但上述方法存在识别准确率低、时效性差和可识别工作模式种类较少的问题。近年来,随着深度学习技术的高速发展,其在目标识别领域表现优异,因而将深度学习技术应用到星载SAR工作模式识别中,对于提高星载SAR工作模式的识别准确率和时效性具有十分重要的理论意义和实践意义。
本文针对星载SAR工作模式识别精度低和时效性差的问题,提出了基于CGRU-SVM的星载SAR工作模式识别方法。该方法以星载SAR信号脉冲峰值I/Q数据作为输入,结合深度学习网络模型和支持向量机(Support Vector Machine, SVM)实现了星载SAR工作模式的快速准确识别,避免了人工提取分类特征的局限性。最后,通过对比实验验证了本文方法的优越性。
1 星载SAR信号数据仿真
1.1 星载SAR信号数据仿真流程
星载SAR卫星通常在空间近地轨道运行速度较快,同时星载SAR天线主瓣波束较窄,因而,采用地面天线对星载SAR主瓣信号侦收时,会受跟踪时间的限制。然而,星载SAR多采用高增益、强方向性天线,除主瓣外,还存在具有全方位辐射的功率较强的旁瓣,因而,对星载SAR天线旁瓣的侦收具有可行性。综上,为减弱跟踪时间限制的不利影响,在多数情况下,可通过侦收星载SAR的旁瓣信号以增加跟踪时间和提高截获信号的质量。星载SAR信号的仿真流程如图1所示,具体步骤如下。
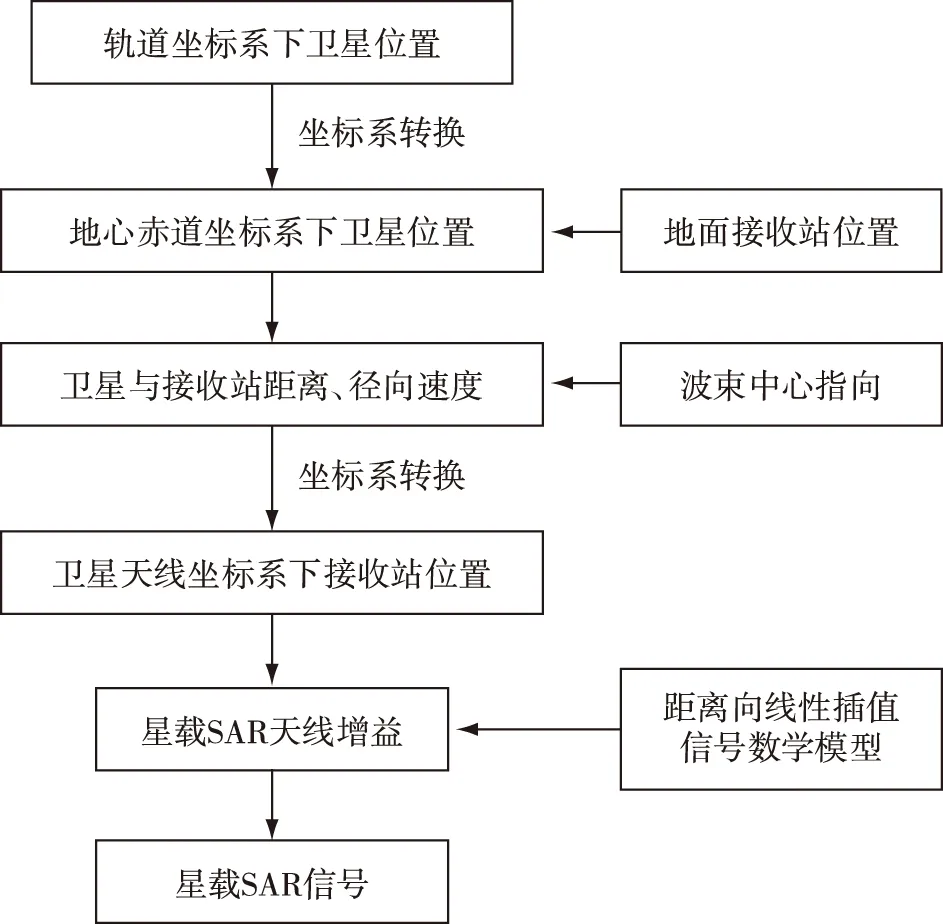
图1 星载SAR信号的仿真流程
1)以真实SAR卫星轨道参数为基础,依据地球椭球模型求解出不同方位时刻星载SAR在地心赤道坐标系中的具体位置坐标。
2)结合被观测目标经纬度,计算出可能对被观测目标产生不利影响的轨道弧段;再结合星载SAR侦察模型,计算出地面接收机可侦收到星载SAR信号的区域范围。
3)在可侦收区域内随机位置部署信号接收机,根据接收机位置,计算各个时刻卫星与接收机间的距离和相对于接收机的径向速度;星载SAR天线统一采用平面相控阵天线,可选择的成像工作模式总共有五种,分别是常规条带模式、常规聚束模式、滑动聚束模式、斜视扫描模式和侧式扫描模式。星载SAR处于不同成像模式时,其天线波束中心指向也是不同的,因此,需求出不同方位时刻SAR天线的波束指向。
4)求解星载SAR天线增益时,需区分方位向和距离向,首先计算地心赤道坐标系到天线坐标系的转换矩阵,再利用转换矩阵将接收机的位置映射至天线坐标系中,结合俯仰角和方位角求解天线的方位向增益,之后采用线性插值求解天线的距离向增益。
5)依据星载SAR信号模型求解得到地面接收机截获的星载SAR信号,星载SAR常采用线性调频信号,其发射信号数学模型如下:

(1)
其中,()为理想的线性调频信号,为时间变量,为初始频率,为调频斜率。
星载SAR发射脉冲如下:
()=()cos[-()]
(2)
(3)
其中,()为单个脉冲,为时间变量,为载波角频率,()为矩形窗函数,()为线性调频函数,()为脉冲串,为脉冲个数,为脉冲重复周期。
地面接收机截获的星载SAR信号模型如下:
()=[-()]·exp{2π{[-()]+

exp{[-()]}
(4)
其中,()为时刻接收的信号,为时间变量,()为多普勒频率,()为接收信号延迟,(-())为降调频时保留的载波相位。
1.2 星载SAR信号数据仿真结果
侦察星载SAR卫星时,具有实际意义的是SAR天线增益的最大值及其变化趋势,可通过截获的星载SAR信号的脉冲峰值变化表征。为尽可能保留处于不同工作模式下的星载SAR信号天然无损的分类特征,本节考虑以星载SAR信号脉冲峰值I/Q数据作为输入。受星载SAR开机工作时间和地面接收机位置不确定的影响,往往难以截获完整的星载SAR信号脉冲串。为更加符合真实场景,在仿真生成星载SAR信号时,设定星载SAR发射的完整脉冲串中脉冲个数为1 200 个,提取各个脉冲峰值的I路同向分量和Q路正交分量,组成1个尺寸为1 200×2的矩阵,再将该矩阵拆分成10个120×2小矩阵,每个小矩阵作为星载SAR信号的1个样本,每个样本表示处于不同工作模式星载SAR发射的不完整脉冲串的脉冲峰值I/Q数据。最终生成的星载SAR信号数据集共包含五种工作模式,分别为常规聚束模式、常规条带模式、滑动聚束模式、斜视扫描模式和侧式扫描模式,每种工作模式包含有 6 202 个样本,共计31 010个样本,不同工作模式样本的脉冲峰值I/Q数据如图2所示。
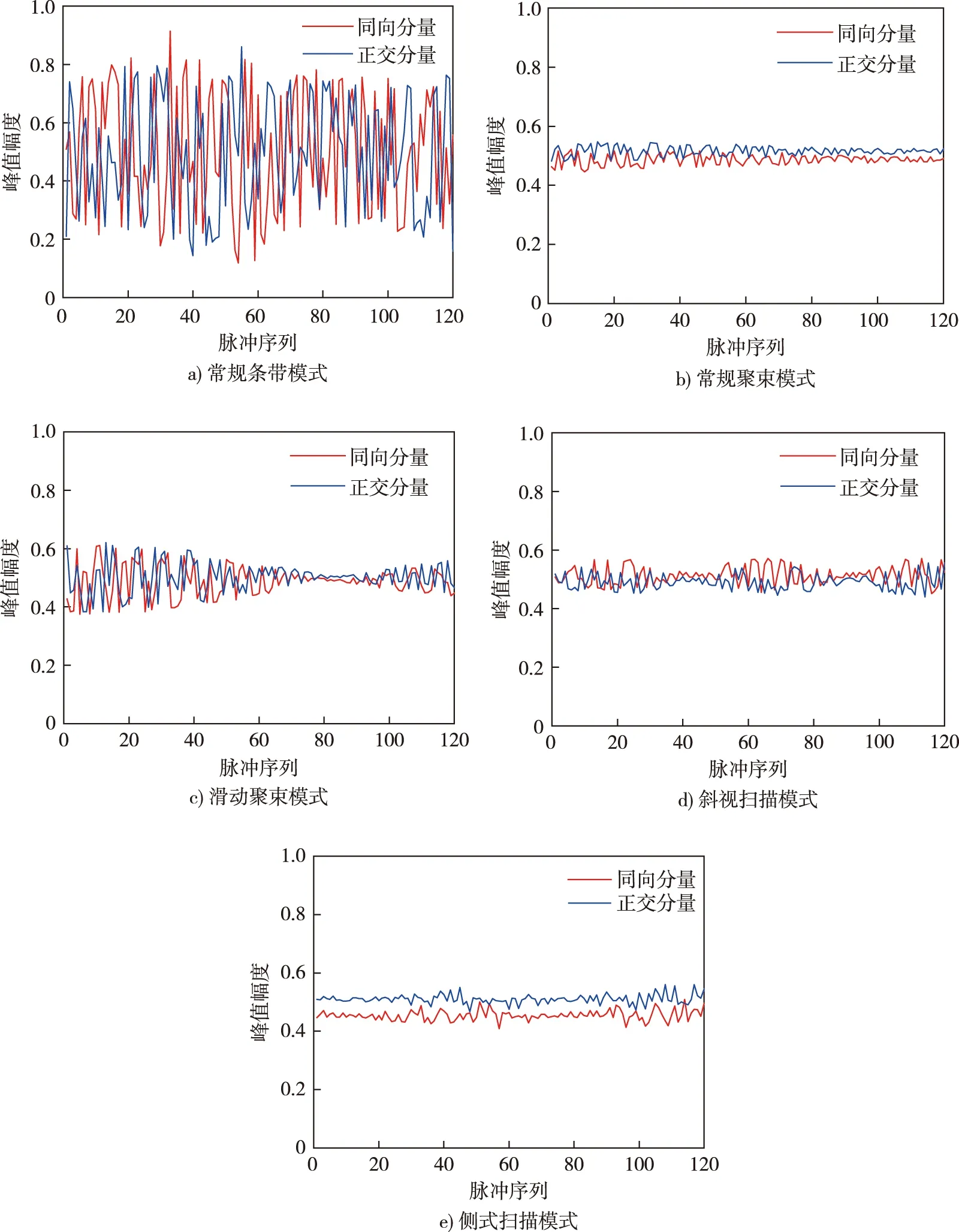
图2 不同工作模式样本的脉冲峰值I/Q数据示意图
2 CGRU-SVM网络模型设计
2.1 卷积神经网络
信号的I/Q数据是具有固定长度的矩阵,因此,可将其视为单通道的图像,采用卷积神经网络(Convolutional Neural Network,CNN)提取其空间特征。卷积神经网络凭借其独有的局部权值共享结构,可有效降低网络模型的复杂度,同时可有效学习网络输入与输出间的映射关系,在不需要求解出两者间数学表达式的情况下,即可使网络具备映射能力。
2.2 门控循环神经网络
卷积神经网络处理时序信息时,由于网络具有的单向无反馈连接方式,导致网络中各层神经元的反馈信息只能向上逐层传递,样本信息的处理往往是相互独立的,而时间序列信息大多与在同一时间段内的背景信息联系紧密。相比之下,循环神经网络(Recurrent Neural Network,RNN)可更加高效地挖掘具有时间序列特性数据中的时序信息和语义信息。但是,由于常规RNN存在长期依赖性问题,在网络训练中会存在梯度消失等问题,使得RNN无法学习数据中的长期依赖信息。针对上述问题,长短时记忆(Long Short-Term Memory,LSTM)和门控循环单元(Gated Recurrent Unit,GRU)等RNN结构的变种相继被提出。

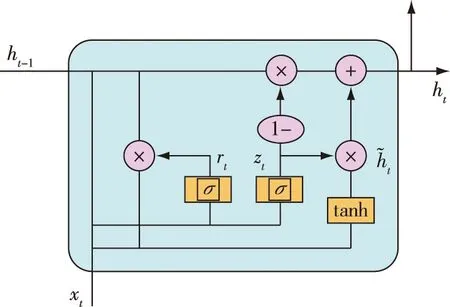
图3 GRU单元结构示意图
GRU网络具体计算流程如下:
=(+-1)
(5)
=(+-1)
(6)

(7)

(8)
其中,和分别为输入层到重置门和更新门的权重矩阵,和分别为隐藏状态到重置门和更新门的权重矩阵,为输入层到隐藏状态的权重矩阵,为隐藏状态间的权重矩阵,*为元素级乘运算,(·)和tanh(·)分别为sigmoid激活函数和tanh激活函数。
2.3 CGRU-SVM网络模型搭建
为充分提取星载SAR信号的空间特征和时序特征,本节基于CNN和GRU设计了CGRU-SVM识别网络模型,该网络模型由编码器和分类器构成,其结构如图4所示。
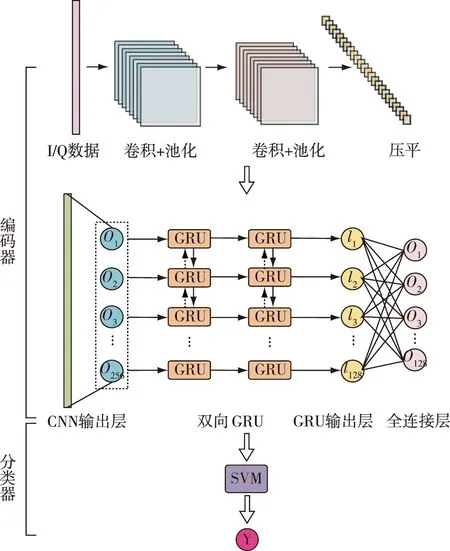
图4 CGRU-SVM网络模型示意图
编码器为CGRU神经网络,其作用是将处于不同工作模式下的星载SAR信号脉冲峰值I/Q数据作为输入,并输出由CGRU神经网络提取的具有固定长度的特征向量,该特征向量包含可有效区分时间序列数据的分类信息。为学习更加精准的分类特征,在GRU隐含层中采用双向结构,正向传播的GRU可计算当前时刻的顺序信息,反向传播的GRU可引入同一序列的逆序信息,故其可在输出层中提供顺序与逆序两类信息。编码器由输入层、2个卷积层+池化层、1个压平层、1个CNN特征输出层、2个单元数为256的BiGRU隐含层、线性激活函数和1个单元数为128的全连接层共同构成。
分类器为线性SVM分类器,其作用是以编码器输出的特征向量作为输入,进而完成识别分类任务,SVM算法通过适当改造可处理多分类问题。线性SVM分类器具有两大优点:一是经过训练后具有较好的泛化性能;二是不需要做任何的特征提取及变换。因此,本节选取采用线性核函数的多分类SVM分类器。
3 实验验证与结果分析
3.1 CGRU-SVM模型训练
为训练CGRU-SVM网络模型并评估其性能,将星载SAR信号数据集按照3∶1∶1的比例划分为训练集、验证集和测试集。利用训练集和验证集数据开展CGRU-SVM网络模型的训练,采用一些训练技巧以应对可能出现的问题,在每个最大池化层和BiGRU隐含层后应用dropout机制以避免网络过拟合,在每层后添加批归一化以加速网络训练。采用SVM处理多分类问题时,常采用识别准确率和合页损失(hinge loss)来评价网络训练效果,上述两项定义如下:
=
(9)

(10)
为有效降低损失函数值以提高训练准确率,使用Adam优化器并设定初始学习率为1×10,dropout率为0.3,训练迭代次数为200。经过200次训练迭代后,训练准确率和损失值变化如图5和图6所示。从图中可以看出,CGRU-SVM对训练集和验证集的目标识别准确率均收敛到较高精度,损失值持续下降并收敛到稳定值,结果表明CGRU-SVM训练效果较好。
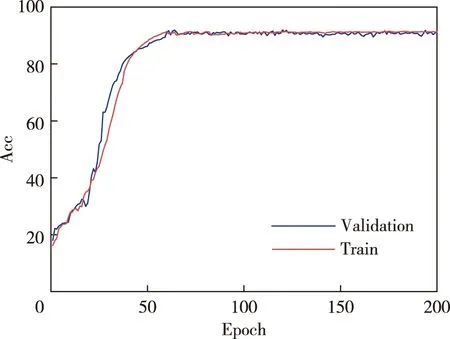
图5 训练过程中识别准确率随迭代次数变化情况
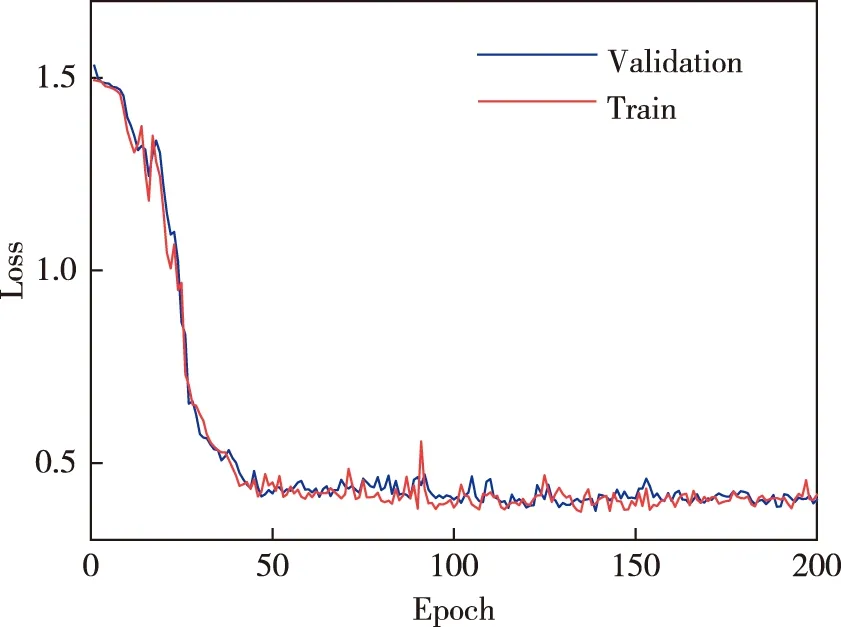
图6 训练过程中损失值随迭代次数变化情况
3.2 CGRU-SVM模型对比验证
为评估CGRU-SVM模型的识别性能并验证本文提出方法的优越性,本节开展了不同识别方法性能的对比实验。对于传统星载SAR工作模式反演方法,本节按照文献[4]中方法提取SAR信号的接收功率形态与多普勒历程作为特征向量,结合SVM分类器实现星载SAR工作模式的识别。对于其他深度学习模型,在本文阐述了不同循环神经网络的优缺点,包括常规RNN、LSTM以及GRU,因此,选取上述模型作为对比模型。为保证对比试验的有效性,在实验中采用同样的训练数据、网络超参数以及计算配置。
将划分好的测试集数据输入训练好的不同分类模型中,并输出星载SAR工作模式的识别结果,不同识别方法的识别准确率对比结果如表1所示,不同网络模型的训练对比结果如表2所示,不同识别方法的分类混淆矩阵如图7所示。实验结果表明,本文提出的CGRU-SVM模型的识别性能优于其他所列方法,特别是相较于传统反演方法,识别准确率有较大提升,平均识别准确率最高可达91.30%,相较于CLSTM-SVM,CGRU-SVM模型结构更加简单,虽然两者识别准确率相差不大但CGRU-SVM模型的训练时间大幅度缩短,CRNN-SVM模型由于其网络结构限制和梯度爆炸等问题的影响,识别准确率低于上述两种网络模型。综上所述,本文设计的CGRU-SVM模型在鉴别星载SAR工作模式时更具有优势。
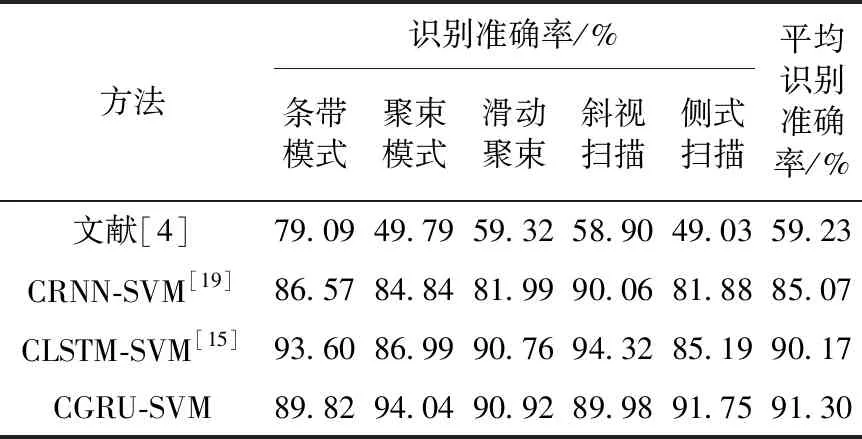
表1 不同识别方法性能对比结果

表2 不同深度学习模型的训练对比结果
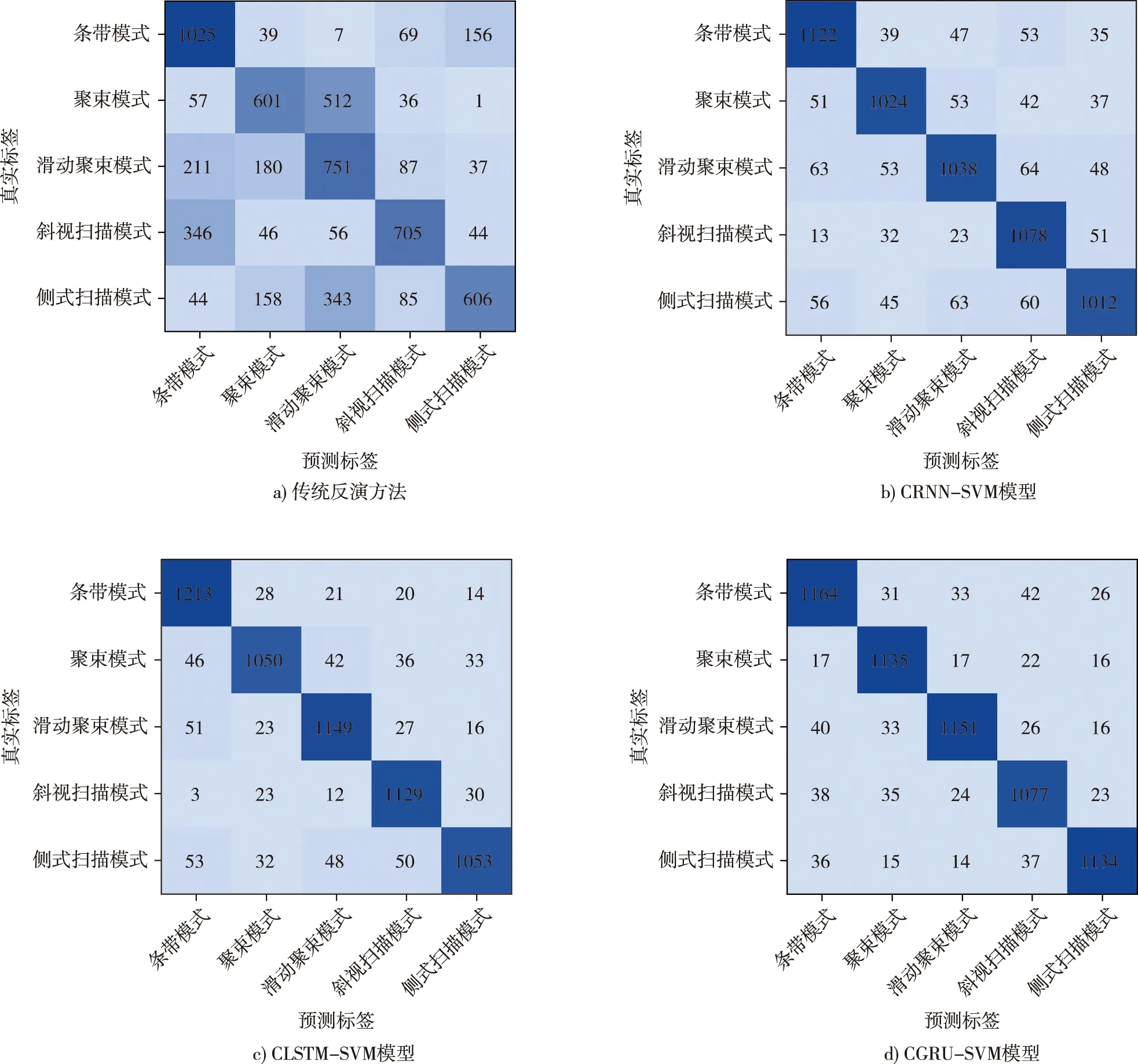
图7 不同识别方法的分类混淆矩阵
4 结束语
针对星载SAR工作模式识别问题,本文提出了一种基于CGRU-SVM的星载SAR工作模式识别模型。该模型将直接下采样得到的星载SAR信号脉冲峰值I/Q数据作为输入,通过CGRU深度学习网络模型提取了脉冲峰值I/Q数据的深层次本质特征向量,最后利用SVM分类器实现了星载SAR工作模式的有效识别。
与传统的星载SAR工作模式反演方法相比,本文提出的方法省去了人工提取信号特征和综合比对判决步骤,优化了识别过程,显著提升了星载SAR工作模式的识别准确率,平均识别准确率可达91%以上。同时,综合考虑识别性能和训练效率,本文提出的方法相较于其他循环神经网络模型更具有优势。
猜你喜欢
健康之家(2021年19期)2021-05-23
健康之家(2021年19期)2021-05-23
医学食疗与健康(2021年27期)2021-05-13
科学导报(2021年7期)2021-02-22
健康体检与管理(2021年10期)2021-01-03
读与写·教育教学版(2017年10期)2017-11-10
晚晴(2016年11期)2016-12-20
南都周刊(2015年4期)2015-09-10
南都周刊(2015年3期)2015-09-10
南都周刊(2015年1期)2015-09-10
