无接触式智能打包垃圾桶设计
2022-06-16 14:18李世龙廖一波梁荣智覃维伦
装备制造技术 2022年3期
李世龙,姚 嘉,廖一波,梁荣智,覃维伦
(桂林电子科技大学 机电工程学院,广西 桂林 541000)
0 引言
随着人们对美好生活的要求日益增加,普通的公共垃圾箱已经不能满足对健康与清洁的要求。纵观国内外,家用室内垃圾箱已经基本实现了智能化,比如感应开盖、触摸开盖、踩踏开盖等。互联网的发展使智能家居逐渐不再遥远,各种家用电器包括垃圾箱在内的设施逐渐演化成为一体化控制。
但是公共垃圾设施却依旧是最古老的形式,在城市的形象中,它们总会被人们贴上“脏乱差”的标签。室外公共垃圾桶设计并没有向智能化发展的趋势,且室外的环境较为恶劣,电力的供应也是一大问题。上述种种原因导致了智能化垃圾桶无法在室外的公共区域投放及使用。对此,需研究开发一种新型的智能化公共垃圾箱,将医院、小区、高铁站、地铁站、学校等人口密度高、人流量大的地区设为目标场景,实现垃圾的无接触式投放,垃圾袋自动打包与智能化的分类管理。
设计与现有产品比较优势如下:(1)本产品不需要购买一次性垃圾袋适配盒,只需特定的长筒型压缩垃圾袋即可;(2)本产品的自动打包功能可实现循环工作,当垃圾袋用尽后只需对垃圾袋进行更换;(3)太阳能储能机构保证产品户外使用的能源供给;(4)模块化设计便于后期的拆卸及维修。
1 垃圾箱整体布局
垃圾箱的总体结构包括总箱体(内外两层结构)、垃圾袋盒、液晶显示屏、太阳能供电模块、电机驱动的丝杠热封装置、机械手、舵机、声控芯片与人体热感应装置等。另外也可以包括一些其他的公共设施组件:照明灯,酒精喷雾消毒器,紫外线杀菌处理装置等。控制机构将Arduino Mega2560和Arduino Uno作为主控芯片,在保证稳定控制的前提下降低主控板的使用成本与消耗成本,使各个模块相互协调作用,完成各机构运动控制。图1为垃圾桶整体结构示意图。
本设计的基本工作原理:声控机构与人体热感应机构配合实现无接触自动开盖并有效防止误开盖操作;电机控制顶部丝杠的旋转从而使带有热封条的长杆互相靠近,实现对垃圾袋口的挤压与熔化,完成垃圾袋装满后的热封打包;箱体设置为内外层两层结构使内层箱体可以导出方便垃圾袋的移除;电机控制内层箱体内部的丝杠旋转使机械手纵向移动,机械手内部舵机使其实现夹取动作,以上两部分的配合完成垃圾袋的拖拽。
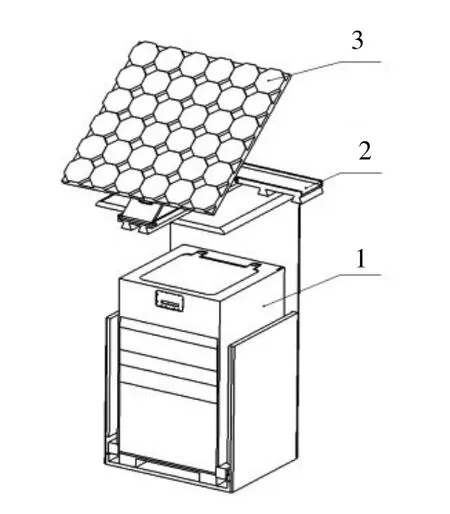
图1 垃圾桶整体图
2 具体功能实现方案
2.1 自动开盖功能
为了实现垃圾箱的全程无接触,产品采用语音识别芯片LD3320和非特定语音识别算法对于控制语音命令进行识别,实现对于垃圾桶的智能化语音识别控制,完成远距离非接触式智能开闭和系统运动的功能[1]。考虑到一些特殊公共环境的嘈杂程度较高,采用HC-SR501人体热感应装置作为无接触开盖的备选方案,此热感应模块通过主控芯片无接触控制箱体顶盖的开合与内层箱体的导出,当语音模组无法正确识别时便采取热感应的备选方案以实现自动开盖。自动开盖机构如图2。
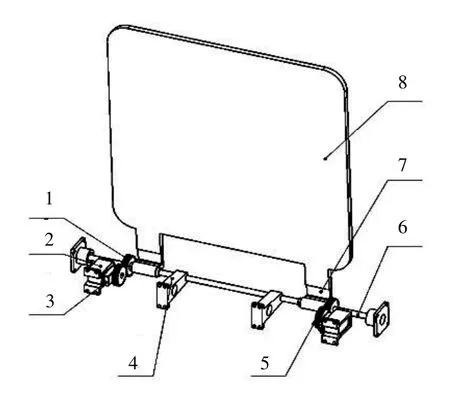
图2 自动开盖机构图
2.2 自动打包功能
现有的家庭智能垃圾桶的垃圾袋需要一个适配盒,每个适配盒只能装大约四十到六十个垃圾袋,适配盒属于一次性用品。针对此问题,设计出可以循环使用的适配盒,盒底采用半开放的弹簧结构,工作中利用机械手丝杠的配合机构将其拉至内部箱体底部,内层箱体顶部的丝杠热封机构将拉伸的垃圾袋熔断并封口,之后再由机械手将其拉至底部,实现机械结构上的多次循环,垃圾袋拖拽机构如图3。
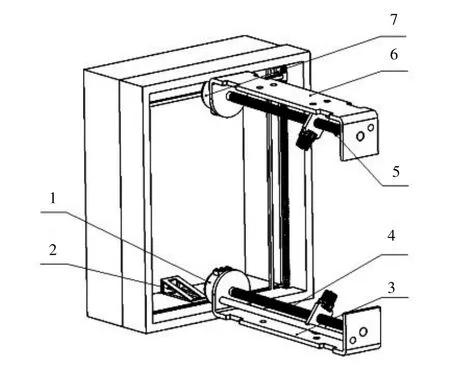
图3 垃圾袋拖拽机构图
3 控制功能实现方案
3.1 语音模块控制
产品设置语音模块控制垃圾桶的开关,主控芯片与LD3320实现通讯,在程序中运用二级语音词条,保证工作期间不受外界杂音的干扰,当用户向语音识别模块发出一级指令时,该模块会被唤醒,并等待接收用户发出的二级指令即垃圾名称。当接收到二级指令后,会把信息通过串口通信发送给单片机[2]。设定的开启时间定为五秒确保正常的垃圾投掷。在程序运行中屏幕会显示提示信息。具体流程如图4。
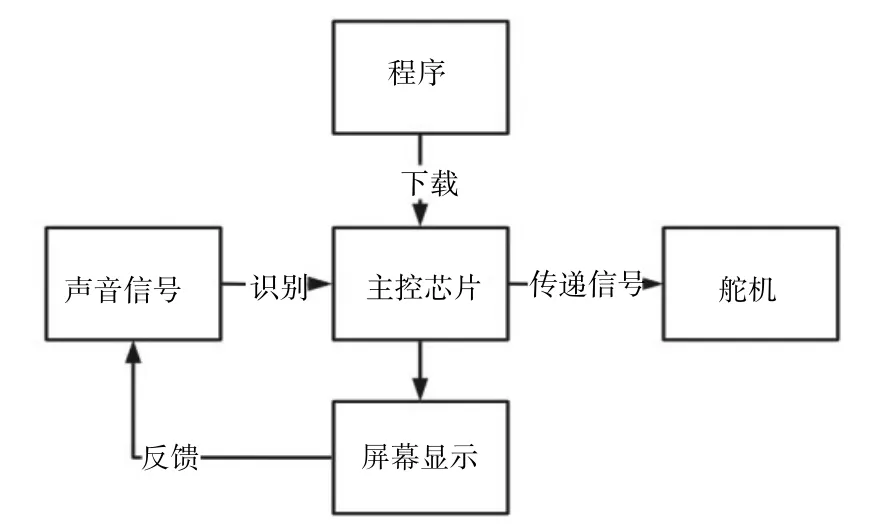
图4 语音功能流程图
3.2 自动打包控制
自动打包控制子系统中,继电器触点的开闭决定电热丝电源、电热丝、继电器所组成回路的开闭,进而控制电热丝是否加热[3]。自动打包具体流程图如图5。封口所用电热丝的材质为镍铬合金电热丝。

图5 自动打包流程图
4 控制功能调试及实验
4.1 语音识别功能
根据所使用的LD3320模块具有的功能进行词条稳定性的实验,在代码中分别设置一级词条,二级词条与三级词条,依次烧录进单片机中进行实验,分析三者的优劣,选择最优方案。
一级词条:单片机只需识别单个词条便可做出响应,速度快,但在复杂的环境下容易出现某个相似的名词使单片机误判。
二级词条:单片机识别第一个名词后给出响应但不工作,再次识别第二个名词后单片机接受信号开始工作,稳定性相比于一级词条大幅度提高,但操作较为复杂,工作反应时间较长。
三级词条:需要依次说出三个名词并且单片机都成功识别后才可工作,稳定性在三者中最高,不易出错,但反应时间长,效率极低,操作复杂,不方便使用。
结论:选择第二个方案作为垃圾桶语音识别的控制代码。在较为便捷的使用过程中保证了一定的稳定性。
4.2 温度感应功能
温度感应装置的灵敏度是影响温度感应功能的主要因素,设置的灵敏度过高会使装置在检测到远距离人体信号时做出响应,而过低则会使其无法做出响应。因此需要调节合适的灵敏度使响应距离保持在30 cm左右。五个灵敏度梯度用数字表示,实验结果见表1。

表1 温度灵敏度实验表
4.3 丝杠转速对垃圾袋口压缩程度的影响
全速:无法完成压缩工作,垃圾袋口易脱落。
半速:压缩很快但实验中有百分之七十的概率会使垃圾袋口脱落。
1/4速:压缩比较稳定,效率高。实验中没有出现垃圾袋口脱落的情况但速度较慢。
1/8速:压缩效果最为稳定但压缩极慢,效率低。
结论:1/8速的效果最好,但是在实际应用中等待时间太长,效率低,不与采用;1/4速相比于1/8速的压缩效果较差,但也可以满足实际使用的需求,且等待时间短,比较符合预期,故采用。
5 结论
无接触式智能垃圾桶的设计符合国家公共卫生建设方向,适用于大多数室外环境,无接触式设计可以有效减少细菌病毒的传播。采用模块化的方式进行功能部件的设计,便于产品组装与后期的拆卸与维修。主控芯片的稳定信号传输保证了各个机构的协调配合,共同完成一系列复杂的任务。产品的应用前景好,可以提高城市公共场所的容貌,为城市清洁带来便利。
猜你喜欢
机床与液压(2022年8期)2022-09-19
大灰狼画报(2022年2期)2022-05-23
动漫界·幼教365(小班)(2020年12期)2020-12-14
商品与质量(2020年48期)2020-11-26
电脑知识与技术·经验技巧(2020年3期)2020-05-07
汽车实用技术(2020年4期)2020-04-10
快乐作文(3.4年级)(2019年5期)2019-09-10
发明与创新·大科技(2018年2期)2018-03-17
文学港(2011年3期)2011-11-21