基于小脑模型神经网络的温控负荷优化调度方法
2022-06-09 07:28:00李泽辉徐程琳
电力系统自动化 2022年10期
杨 婕,李泽辉,马 锴,徐程琳
(燕山大学电气工程学院,河北省秦皇岛市 066004)
0 引言
电力系统的安全稳定运行对经济的健康发展和社会的平稳有序具有重要意义[1-2]。传统上,电力系统通过调整发电侧机组的出力来维持系统的平衡,调节方式较为单一且会产生额外的经济成本和环境成本[3];此外,随着电力负荷的增加、可再生能源的接入,发电侧的调节能力逐渐下降[4]。为保证供电服务质量,传统电网开始逐渐向智能电网转变。智能电网能够利用先进的信息技术整合和调度需求侧资源以提供多种辅助服务[5-6]。因此,合理地控制需求侧资源能够对传统的发电调度进行补充,进而增强电力系统的稳定性[7]。
在需求侧资源中,温控负荷(thermostatically controlled load,TCL)是一类由恒温器控制开关、能够实现电热转换、温度可调的电力设备,包括热泵、热水器、冰箱、暖通空调等[8]。TCL 能够被用于提供频率调节服务,这主要是基于以下3 点:一是广泛分布于住宅、商业和工业建筑,可调潜能较大;二是具有良好的热存储能力,可以被视为分布式储能设备;三是控制方式较为灵活,能够及时响应系统的功率需求[9-11]。总之,通过对TCL 进行合理的控制,能够维持电网频率在一定的偏移范围内,因而具有较强的现实意义。
TCL 的控制方式主要有2 种,分别为直接开关和温度设定。文献[12]基于负荷直接开关来实现对频率的调节。该方法的优点是在负荷的调节能力范围内,系统的跟踪精度较高,且对用户舒适度的影响较低;缺点是当负荷的室内温度集中位于温度边界附近时会造成设备频繁开关,不但无法完成调节任务,而且会减少设备的使用寿命[13]。温度设定能够避免上述缺点,但是它的局限性表现在功率的跟踪效果依赖于所设计的控制器(常用的控制器有最小方差控制器[14]、滑模控制器[15]和内模控制器[16]等)。此外,它的局限性还表现在温度的变化范围较大,会对用户的舒适度产生影响[17]等方面。
上述文献均采取单一的控制方式对TCL 进行调度,但是往往无法满足应用需求。这不仅是因为其固有的缺陷,还因为用户的要求不同。温度要求较高的负荷适合采用直接开关,此时用户期望设备的启停频率保持在较低水平以延长设备的使用寿命;而温度要求较低的负荷适合采用温度设定,此时用户期望温度的变化维持在一定范围内以提高舒适度。因此,将2 种控制方式结合就具有实际意义。文献[18]提出了一种基于并联结构的混合控制策略,该策略能够提升系统的跟踪精度,减少设备的开关次数,但是温度的变化范围很大,会降低用户的舒适度。文献[19]基于2 种控制方式提出了一种在线优化模型,并利用动态多群粒子群算法求解0-1 规划问题,该模型能够降低设备的开关频率,但是无法在提高跟踪精度的同时提升舒适度。
针对上述策略存在的问题,本文提出一种基于小脑模型神经网络(cerebellar model articulation controller,CMAC)的混合控制策略。该策略通过CMAC 实时优化功率调节量,使采用不同控制方式的负荷集群为彼此提供缓冲能量,不仅能够使系统的跟踪精度进一步提高,同时也减少了设备的开关频率,降低了温度的变化范围,提升了用户的满意度。仿真结果验证了所提策略的有效性。
1 TCL 动态模型及控制系统
1.1 TCL 动态模型
考虑室内环境、室外环境以及建筑特性的一阶常微分方程模型精确性高、计算简单,在实际中应用较为广泛[20-21]。在模型中引入状态变量Ti和虚拟变量si,制冷模式下第i个TCL 的运行特性可以表示为:

其中,si(k)的变化规则如下:

1.2 TCL 控制系统
频率调节对电力系统的安全稳定运行具有重要意义,通过对TCL 集群进行合理的控制,能够保证电网频率在一定的偏移范围内。
TCL 的控制方式主要分为直接开关和温度设定。直接开关的TCL 运行特性如图1(a)所示,负荷的温度设定值保持不变,调度指令在运行时间k=k0时直接作用于设备开关。该方法的优势是能够在温度可调范围内实现对功率的精确跟踪,并且对用户舒适度的影响较小,但是当室内温度接近温度边界时,会导致其频繁开关,从而降低设备的使用寿命。温度设定的TCL 运行特性如图1(b)所示,调度指令在k=k0时将温度设定值上调,由于负荷的温度死区区间不变,故其运行区间会发生变化,从而间接改变设备的开关状态。由于其负荷的室内温度在温度死区区间内始终为均匀分布,故不会出现室内温度接近温度边界附近的情况,但是对用户舒适度的影响较大,且其跟踪效果依赖于设计的控制器。
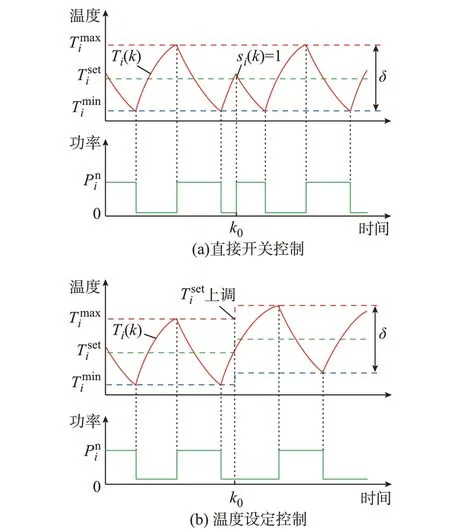
图1 TCL 运行特性Fig.1 Operation characteristics of TCL
在实际应用中,合理地分配功率调节量能够使采用不同控制方式的负荷集群相互配合,不仅能够实现对功率的精确跟踪,而且能够避免各自的局限性,满足用户的不同需求。在分配功率调节量时,需要考虑诸多因素。一方面,要满足电力系统对频率调节的要求,保证跟踪精度在一定范围内;另一方面,对于采取直接开关的负荷,要尽可能减少其开关的次数,延长设备的使用寿命,而对于采取温度设定的负荷,要尽可能减少其温度的变化,提升用户的舒适度。这些因素与功率分配之间往往存在高度的非线性关系,并且频率调节对实时性的要求较高。因此,常规的优化方法无法得到最优的功率分配。CMAC 是一种表格查询型自适应网络,能够解决复杂的高度非线性的函数映射问题,并且每次只需更新与当前输出有关的连接权值,因而能够在保证函数非线性逼近性能的前提下加快学习速度,从而满足频率调节对实时性的要求,进而得到最优的功率分配。因此,本文采用CMAC 对功率调节量进行优化分配。


图2 基于CMAC 的TCL 控制系统Fig.2 TCL control system based on CMAC
将跟踪功率信号Ptarget、跟踪误差信号e和模糊综合评价反馈的综合评价指标J作为CMAC 的输入量,经实时优化后得到功率分配信号α。然后,直接开关控制集群和温度设定控制集群依据所分配的跟踪功率信号完成调节任务,并根据不同用户的需要分别定义储能指标CSO和不舒适度指标Cu。最后,将CSO和Cu作为综合评价用户满意度m的2 个因素。由于采用CMAC 对功率调节量进行分配既要满足电力系统对跟踪精度的要求,又要考虑不同控制方式用户的需要,因此,将反映跟踪精度的均方根误差指标ERMS和反映用户需求的用户满意度m相互权衡得到综合评价指标J,并将其反馈回CMAC,从而为功率调节量的优化提供根据。所提出的混合控制策略能够提升系统的跟踪精度,同时也能够减少设备的开关频率,降低温度的变化量,进而提升用户的满意度。
2 CMAC 调度
2.1 CMAC 结构
CMAC 需通过2 个阶段的映射实现非线性函数表达关系,即X→AC 的映射和AC→AP 的映射。具体的网络结构如图3 所示。其中,X 表示输入空间,AC 表示虚拟空间,AP 表示物理空间。输入空间中的3 个变量分别为跟踪功率信号Ptarget、跟踪误差信号e和综合评价指标J。虚拟空间中共有256 个虚拟地址单元,每次运行激活4 个地址单元(即激活时状态变量vd为1,未激活时vd为0)。物理空间中共有256 个物理地址单元,每个单元存储着连接权值ωd,将虚拟空间内被激活的4 个地址单元经地址函数f(j)映射到物理空间的4 个地址单元中,以实现CMAC 输出值(即功率分配信号α)的计算。
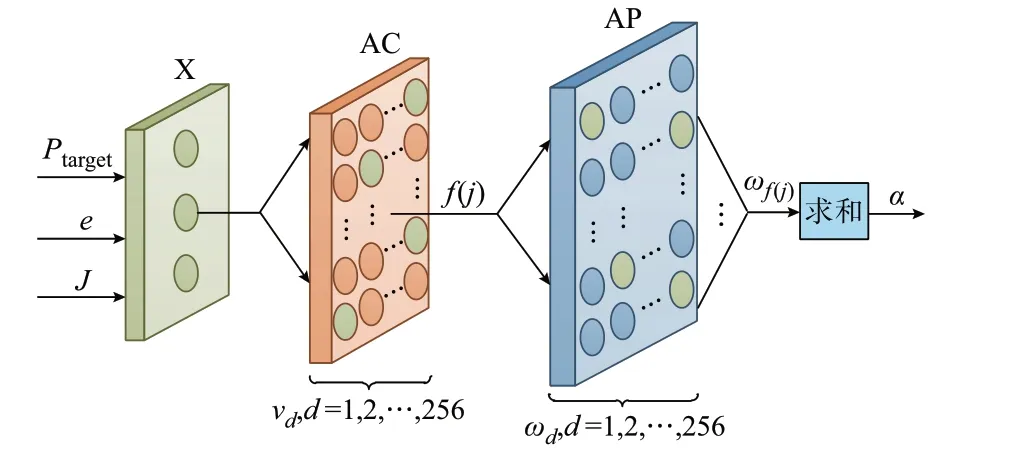
图3 CMAC 结构Fig.3 Structure of CMAC
2.2 工作原理
2.2.1 X→AC 的映射
将X 中的点映射为离散点,即


取泛化常数mt=4,即每个变量具有4 层。再将每层的量化区间划分为nb个区域块,取nb=4,则q=mt(nb-1)+1=13。只有同层的不同变量的区域块才能相互组合为虚拟地址单元,则虚拟地址单元的个数为:

式中:n为变量的个数。由于mt=4,故每次运行激活4 个虚拟地址单元。
该映射过程是虚拟地址生成的过程,X 中相距较近的离散点区域块的重合度较高,而相距较远的离散点区域块的重合度较低,因此CMAC 具有较强的局部泛化能力。为便于对上述分析的理解,附录A 中进行了举例说明。
2.2.2 AC→AP 的映射
AC 中共有256 个虚拟地址单元,然而每次运行只有4 个地址单元被激活(某些地址单元从未被激活);并且在实际应用时,网络训练只需对AP 中部分地址单元的连接权值进行调整,因此采用散列编码技术存储连接权值,以实现数据的压缩存储。但是在此过程中往往会存在地址碰撞的问题,造成CMAC 逼近性能的下降,而引入地址函数能够开辟有序的物理存储空间[22]。本文的地址函数设计如下:

式中:j={1,2,3,4},为激活的地址单元序列,且当j=1 时r=0,当j≠1 时r=mt-j+1。地 址 函 数的值即为AP 物理地址单元的编码。
将AP 物理地址单元的编码所对应的连接权值ωf(j)求和即为CMAC 的输出值α:

当CMAC 输出功率分配信号后,不同控制方式下TCL 集群所分配的跟踪功率信号为:
式中:Pon和Pu分别为采用直接开关和温度设定的TCL 集群的跟踪功率信号。
2.3 学习算法
权值修正采用最小均方(least mean square,LMS)算法,每次迭代只需要更新少量的连接权值就能完成CMAC 的学习,因此学习速度比反向传播(BP)神经网络[23]快,更适合于实时控制。学习算法为:

式中:β为学习因子;l表示迭代次数。
在经过多次学习迭代后,每个物理地址单元内连接权值的修正次数不同,因而其可信度不同。若将权值修正平均分配,则对未学习地址单元的过多修正会导致其对先前的学习造成腐蚀[24]。虽然多次迭代后这种腐蚀会逐步减弱,但是收敛到期望值邻域的时间会延长,这对实时性要求较高的系统会产生影响。因此,需引入信度因子γ取代式(18)中的1/mt,即
式中:g(f(j))表示截至第l次迭代,物理地址单元的编码f(j)所对应的连接权值的总修正次数。
则式(18)可改写为:

引入信度因子能够将学习效果按比例分配到所寻址的物理地址单元中,避免权值修正的平均分配,从而减少对未学习地址单元的过多修正,进而提升连接权值的收敛速度,满足自动发电控制信号对实时性的要求。
3 TCL 控制
3.1 直接开关控制集群储能指标计算
根据1.2 节分析可知,直接开关负荷的温度设定值几乎不变,对用户舒适度的影响可忽略不计,其控制方式直接作用于设备开关。当室内温度接近温度边界时,负荷的调节能力就会下降,此时设备的启停频率较高,使用寿命缩短;而当室内温度接近温度设定值时,负荷的调节能力就会上升,此时设备的启停频率较低,使用寿命延长。
为表征TCL 的调节能力,进而为评估设备的使用寿命提供依据,本文借鉴了对电池荷电状态的定义,在制冷模式下对采用直接开关的TCL 集群定义储能指标CSO:
由CSO的定义可知,CSO位于0 到1 之间。结合式(3)表明:CSO越接近于0,室内温度越接近于温度设定值,此时TCL 的温度分布较为均匀,其可调潜能较大,开关切换不频繁;CSO越接近于1,室内温度越接近于温度上下限,此时TCL 的温度分布较为集中,其可调潜能较小,开关切换较为频繁。因此,CMAC 在输出α时,应尽可能使CSO接近于0,从而减少设备的启停频率。
3.2 温度设定控制集群不舒适度指标计算
根据1.2 节分析可知,负荷的跟踪效果依赖于所设计的控制器,且由于设定值发生改变,温度的变化范围较大,这会降低用户的舒适度水平。
本文采用模糊BP 网络控制器[25]对TCL 进行控制。该控制器将模糊逻辑与神经网络相结合,赋予网络中神经元和连接权值明确的物理意义,具有较强的自学习能力和泛化能力,可实现任意非线性映射。因此,该控制器能够显著提升系统的跟踪精度,本文不再赘述。
为表征用户的舒适度情况,对采用温度设定的TCL 集群定义不舒适度指标Cu为:

由Cu的定义可知,温度设定值越偏离初始温度设定值,用户的不舒适度水平越高。因此,CMAC在输出α时,应尽可能使Cu接近于0,从而降低用户的不舒适度。
4 模糊综合评价
4.1 用户满意度评估
根据3.1 节和3.2 节的分析可知,不同控制方式下用户的需求不同,为综合评价用户满意度,采用模糊综合评判法进行评估,具体操作如下。
1)构建用户满意度因素集U={CSO,Cu}。
2)构建用户满意度评语集V={满意,较满意,一般,较不满意,不满意}。
3)确定各个因素所占权重。由于本文的因素集由CSO和Cu这2 个因素构成,对用户的重要性相同,故取权重A=[a1,a2]=[0.5,0.5]。
4)建立模糊评判矩阵。首先,对每个因素隶属于各个评语的程度进行评判。由于大多数事物都遵循正态分布,故隶属度函数选取为高斯函数,即

式中:ys为第s个因素的输入,分别为CSO和Cu;usp和σsp分别为第s个因素、第p个评语的均值和标准差。
则模糊评判矩阵R为:

5)进行模糊综合评判。模糊评价集为:

式中:“∘”表示模糊矩阵的运算。
由于加权平均型模糊合成算子体现权重作用明显,综合程度较强,可充分利用R的信息,故元素bp为:

6)评估用户满意度。为了将等级连续化、定量化,设定与矩阵B元素对应的等级秩分别为1、2、3、4、5,则定义用户满意度m为:

由m的定义可知,m越小,用户的满意度越高。
4.2 综合评价指标计算
实际应用中,CMAC 在输出α时除了要考虑用户满意度外,还应当满足电力系统对频率调节的要求,即保证跟踪精度在一定范围内。为了能够评估系统的跟踪性能,定义均方根误差指标ERMS为:

由ERMS的定义可知,ERMS越小,系统的跟踪精度越高。为了对调控效果进行综合评估,进而为功率分配信号的优化提供依据,定义综合评价指标J为:

式中:z为满意度比重。
实际上,应当优先保证电网频率稳定,即跟踪精度在一定范围内时可考虑用户满意度,否则不予考虑。z与ERMS的关系如下:
式中:F1、F2、F3、G1、G2、G3均为常数,可根据实际运行情况设定。
CMAC 依据所反馈的综合评价指标就能输出优化的功率分配信号,进而得到不同控制方式下TCL 集群所分配的功率调节量。
5 算例分析
在TCL 中,由于暖通空调所占比例较大且易于控制和管理,因此本文选取2 000 个暖通空调进行仿真实验。负荷参数设置如表1 所示,负荷的初始室内温度均匀分布在温度死区区间内,温度死区区间的设定见附录B。PAGC来自于美国PJM 电力市场的实际频率调节信号,该信号每隔4 s 变化一次。
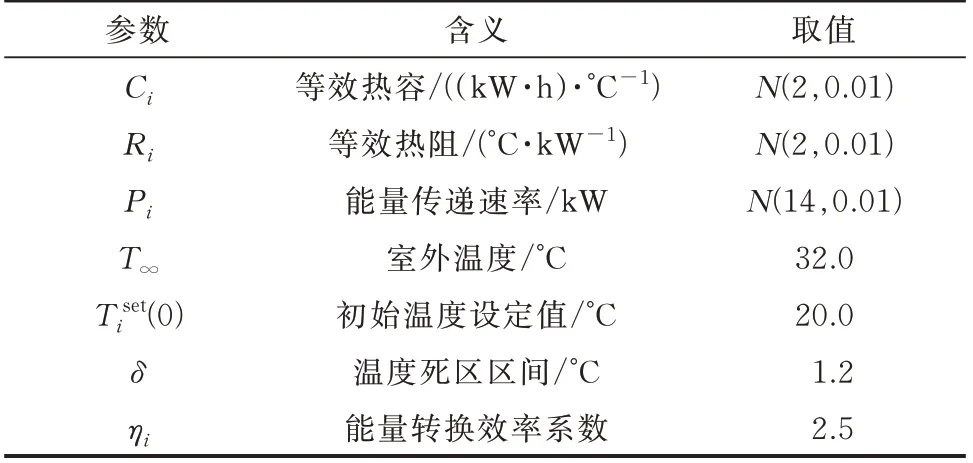
表1 负荷参数设置Table 1 Setting of load parameters
在用户满意度评估中,隶属度函数的参数us1=0,us2=0.25,us3=0.5,us4=0.75,us5=1,σsp=0.2。在综合评价指标计算中,z与ERMS的关系如式(30)所 示 ,其 中 ,F1=2%,F2=3%,F3=5%,G1=0.8,G2=0.5,G3=0.3。其含义为当ERMS取值在(0,2%]时,电力系统的频率调节效果较好,此时CMAC 在输出α时主要考虑用户满意度;当ERMS取值在(2%,3%]时,z取0.5,表明均方根误差指标与用户满意度对系统调控产生的影响相同;当ERMS取值在(3%,5%]时,电力系统的频率调节效果较差,此时CMAC 在输出α时主要考虑均方根误差指标;当ERMS>5%时,z取0,表明系统调控将不再考虑用户满意度,将以提高跟踪精度为主。
通过对2 000 个样本数据进行训练,CMAC 将学习得到的连接权值存储于AP 物理地址单元中。仿真实验模拟了2 h 内的TCL 频率调节服务,3 种控制策略的跟踪效果对比见图4(a)。当只采用直接开关或只采用温度设定控制时,暖通空调的个数各为2 000 个;当采用混合控制时,直接开关和温度设定控制的暖通空调数各为1 000 个。在负荷调节能力范围内,直接开关的跟踪精度较高,e基本为0;但是当超出负荷的调节能力时,即负荷集中位于温度边界附近,会出现Ptotal无法跟踪Ptarget的情况(图4(a)中的紫色圆圈处),造成e急剧扩大,进而影响系统的跟踪精度,而温度设定和基于CMAC 优化的混合控制则不存在上述问题。3 种控制策略的ERMS分别为19.62%、2.46%、1.26%。因此,基于CMAC优化的混合控制的跟踪精度最高。
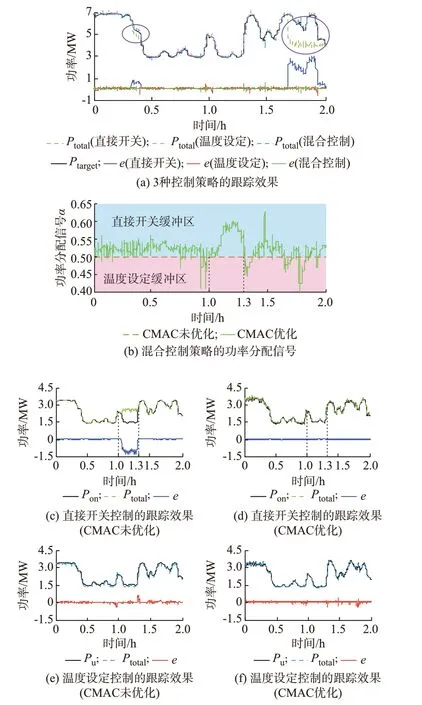
图4 不同情况下PAGC的跟踪效果Fig.4 Tracking effect of PAGC under different conditions
为验证CMAC 优化对Ptarget分配的有效性,本文设置了2 组实验用于对比分析。第1 组实验是CMAC 未参与优化,此时α取值为0.5,根据式(16)和式(17)可以得到Pon=Pu=Ptarget/2,表明直接开关控制集群和温度设定控制集群承担的调节任务相同。第2 组实验是CMAC 参与优化,此时α会发生变化以调整分配给2 个负荷集群的调节任务。2 组实验中α的变化情况如图4(b)所示。图4(b)中直接开关缓冲区是指α>0.5 的区域,此时直接开关的负荷分配的调节任务较重,为温度设定的负荷提供缓冲能量;温度设定缓冲区是指α<0.5 的区域,此时温度设定的负荷分配的调节任务较重,为直接开关的负荷提供缓冲能量。图4(c)和(d)比较了CMAC 优化前后直接开关的跟踪效果。当CMAC未参与优化时,由于直接开关的负荷在k取值为1.0~1.3 h 时调节能力不足,致使Ptotal跟踪失败;而当CMAC 参与优化后,直接开关的负荷在k取值为0.5~1.3 h 时分配的调节任务较重(见图4(b)),负荷的制冷模式就会打开,室内温度虽会上升但不会接近温度上限,因而其在k取值为1.0~1.3 h 时调节能力充足,从而能够完成调节任务。图4(e)和(f)比较了CMAC 优化前后温度设定的跟踪效果。由于温度设定负荷的室内温度在温度死区区间内始终为均匀分布,故都能较好地实现跟踪。通过CMAC 优化α,直接开关和温度设定都能够较好地实现跟踪,验证了CMAC 优化对Ptarget分配的有效性。
在上述2 组实验的基础上,为验证CMAC 优化能够提升用户的满意度,图5(a)至(c)展示了CMAC优化前后CSO、Cu和m的变化情况。如图5(a)所示,当CMAC 未参与优化时,CSO在k取值为1.0~1.3 h时接近于1,表明负荷的室内温度分布较为集中,其可调潜能较低,此时设备开关切换较为频繁。当CMAC 参与优化后,图中A点处的CSO上升到A′点,这是由于CMAC 未参与优化时,CSO在k取值为0.1~0.6 h 时较低,负荷的可调潜能较大,当在这段时间内承担更多的调节任务时,就能够分担后续的调节任务,从而使得B段的CSO降低到B′段,此时负荷室内温度在k取值为1.0~1.3 h 时分布较为均匀,设备的启停频率较低。因此,当CMAC 参与优化后,CSO在k取值为0.1~0.6 h 时升高,而在k取值为0.6~2.0 h 时降低。如图5(b)所示,当CMAC 参与优化后,由于仿真的大部分时间内直接开关的负荷承担的调节任务较重,为温度设定的负荷提供缓冲能量,因而在大部分时间内Cu的值比优化前的值要低,其峰值也由1.1 降低为0.7,用户的舒适度有所提升。图5(c)反映了m的变化情况。一方面,m的峰值由优化前的4.8 降低到优化后的3.6;另一方面,在k取值为0.1~0.6 h 时,CMAC 优化后的m值大于优化前的m值,而在其余时间内则相反。这是因为m是由CSO和Cu经模糊综合评判得到,且在综合评判中二者对m的影响相同,因此m的变化会呈现二者的叠加效应,即图5(a)中CSO和图5(b)中Cu叠加后与图5(c)中m的变化相符。虽然在k取值为0.1~0.6 h 内,CMAC 优化后用户的满意度有所下降,但在大部分时间内用户的满意度都有所提高,因而m的变化相对平缓,总体上提升了用户的满意度。
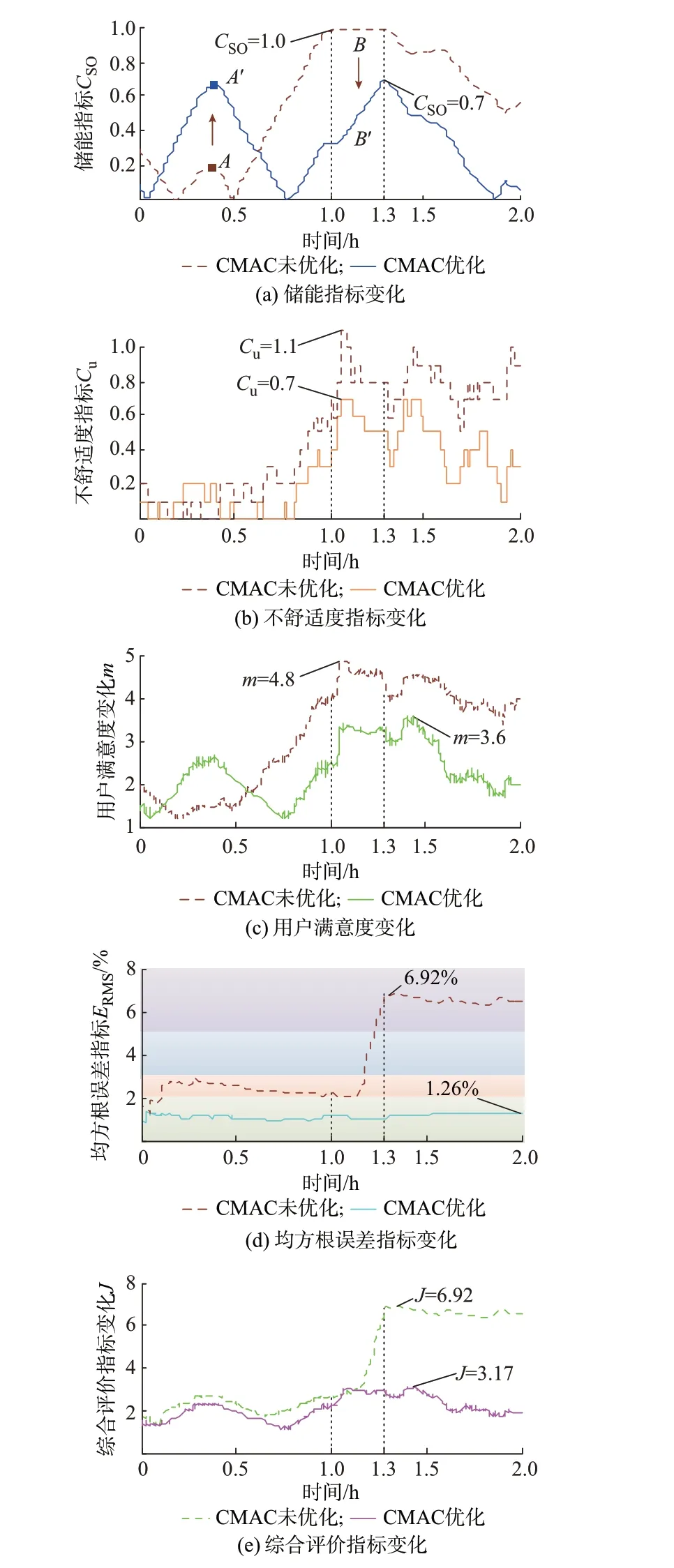
图5 不同情况下各项指标的比较Fig.5 Comparison of indices under different conditions
图5(d)和(e)比较了CMAC 优化前后ERMS和J的变化情况。在图5(d)中,当CMAC 未参与优化时,在k取值为0~1.0 h 时,ERMS值较低且变化较为平稳,这是由于此段时间内负荷的调节能力充足;在k取值为1.0~1.3 h 时,ERMS值急剧陡增,这是由于直接开关的负荷调节能力不足致使调节任务无法完成;在k取值为1.3~2.0 h 时,ERMS值较高且变化较为平稳,这是由于负荷的调节能力虽然充足,但ERMS值在计算时累加了k取值为1.0~1.3 h 的跟踪误差,因而其值维持在高位。当CMAC 参与优化后,ERMS值较低且几乎恒定不变,最终稳定在1.26% 左右。此外,在图5(d)中,根据式(30)将ERMS值划分为4 个区域块,分别为浅紫色、浅蓝色、浅黄色和浅绿色,对应的满意度比重从上到下分别为z=0,z=0.3,z=0.5 和z=0.8,再根据式(29)即可得到J的变化情况,如图5(e)所示。由于CMAC 优化后ERMS值始终位于0~2%以内,故z始终取值为0.8,因此图5(e)中J的变化趋势与图5(c)中m的变化趋势一致。
几种控制策略的对比见表2。基于CMAC 优化的混合控制策略的ERMS最低,可以有效提升系统的跟踪精度;同时CSO和Cu的变化范围较小,且每小时负荷的平均开关次数最低,既能够减少设备的开关次数,延长设备的使用寿命,也能够降低温度的变化范围,提高用户的舒适度水平,从而满足用户的需求。
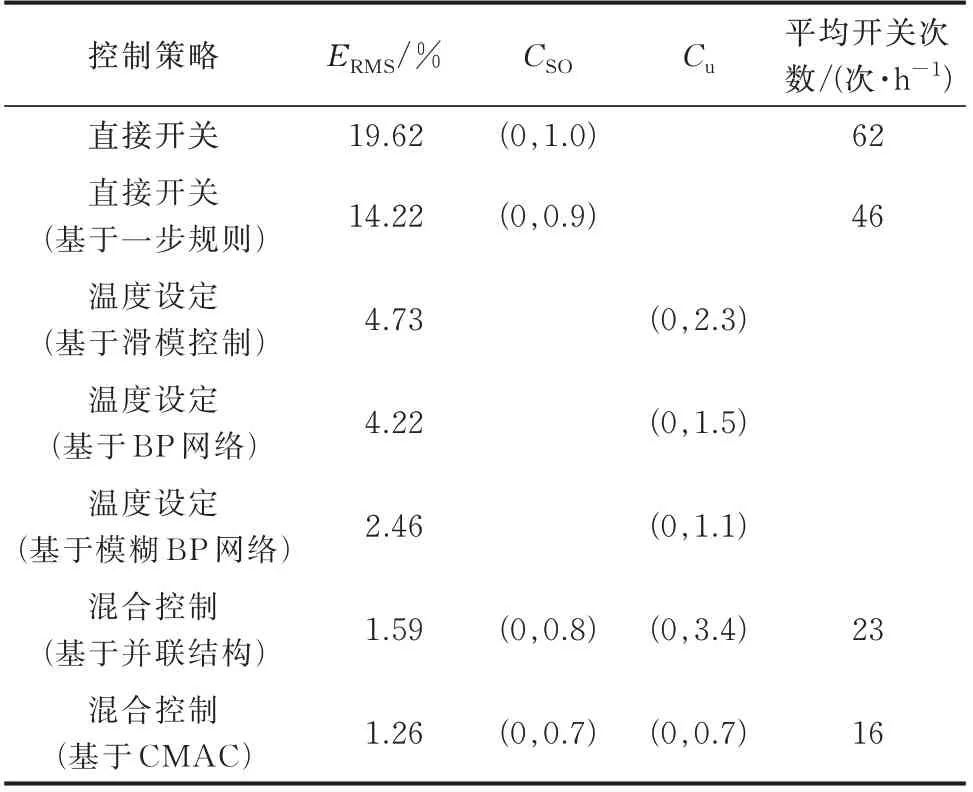
表2 不同控制策略的比较Table 2 Comparison of different control strategies
6 结语
本文提出了一种基于CMAC 的TCL 混合控制策略。针对TCL 直接开关和温度设定2 种基本控制方式的局限性,同时考虑到不同用户的需求,提出了基于CMAC 优化的功率分配方法,并采用了模糊综合评判法对用户满意度进行评估。通过模糊综合评价所反馈的综合评价指标,CMAC 就能够实时优化功率调节量,从而使采用不同控制方式的TCL 集群为彼此提供缓冲能量,最终完成系统的调节任务。仿真分析表明,所提控制策略不仅能够实现对功率的精确跟踪,同时也能够延长设备的使用寿命,提高用户的舒适度水平,进而改善用户的满意度。
本文在表征满意度比重与均方根误差指标的关系时采用阶梯函数,由于实际运行过程中情况比较复杂,因此均方根误差指标和用户满意度之间的权衡有待于进一步研究。
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07 06:21:30
成都信息工程大学学报(2022年3期)2022-07-21 09:35:04
纺织科学研究(2021年9期)2021-10-14 08:52:12
汽车维修与保养(2021年8期)2021-02-16 00:28:20
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01 07:00:46
铁道通信信号(2020年1期)2020-09-21 08:55:16
浙江工业大学学报(2017年5期)2018-01-22 02:03:36
自动化学报(2017年7期)2017-04-18 13:41:02
工业设计(2016年4期)2016-05-04 04:00:15
当代畜禽养殖业(2014年7期)2014-02-27 07:59:15