基于智能优化算法的车辆宽高检测系统
2022-06-09 01:52康晓丽魏汉明
太原科技大学学报 2022年3期
康晓丽,魏汉明
(山西省信息产业技术研究院有限公司,太原 030012)
近年来,我国高速公路的通车里程不断延伸,提升了各地之间的通行效率,这不仅极大的拉动了内需,促进了我国国民经济的飞速发展,也为我国发展的蓝图夯实了基础[1]。根据近几年道路与车辆增长率的统计发现,车辆增长率总是快于道路的增长率。路况拥堵、交通事故和环境污染等的情况越来越多。截至2020年底,全国机动车保有量达3.72亿辆,其中汽车2.81亿辆,新注册登记机动车达3 328万辆。载货汽车保有量达2 944万辆,创历史新高。从分布情况看,我国有53个城市的汽车保有量超过百万辆,机动车数量与高速公路的矛盾愈发突出。
节假日期间,高速公路收费站等卡口处面临的通行压力很大,交通拥挤情况严重。所以对通行车辆检测效率的要求也越来越高。传统的人工检测需要两名工作人员操作,不仅耗费人力,还存在实时性差、效率低、精确度低等问题[2]。红外技术测量虽可实现自动化测量,但其比较适合测量几何尺寸小且规则的物体,当测量货车等大且不规则的物体时,容易出现被测物体挡住光幕,而使接收器接收不到发射来的光信号。基于这种情况,利用激光测量技术,经过优化算法处理,保证车辆宽高信息的精确度,提高检测效率,禁止违规车辆通行,就是一项亟待解决的任务[3-4]。
1 系统结构设计
宽高检测系统的硬件结构主要包括:固定传感器的龙门架、激光传感器(SICK-LMS10)、网络交换机(100 M)、开关电源、工业控制主机等。将激光传感器固定在龙门架上,通过以太网实现上位机与传感器的通信。图1为车辆宽高检测系统构成图。

图1 宽高检测系统构成图Fig.1 Composition of width and height detection system
首先设定传感器的扫描起始位置与终止位置,使激光传感器可以扫描整个车辆断面信息[5]。当设备开机启动后,上位机控制软件向激光传感器发送连续扫描命令,激光传感器会以固定角度连续发射激光(设置为0.5°),激光碰到物体后发生反射并被接收后转发至工控机。车辆进入到检测目标区域后,设置在龙门架上的激光传感器扫描汽车两侧的宽高信息,在车辆通行完成后,工控机将检测到的信息通过运算,得到车辆最高最宽信息,并显示到软件界面中。若存在超限行为,将会触发报警器。如图2所示为车辆宽高检测系统测量流程图。
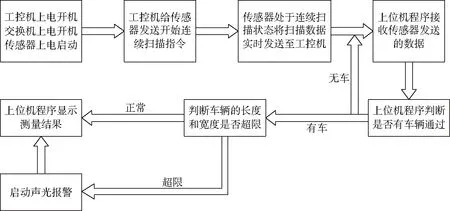
图2 宽高检测系统测量流程 Fig.2 Measurement process of width and height detection system
2 关键技术
在系统运行的过程中,传感器信号将不可避免的受到内外部各种混合因素的影响。自适应滤波器结构简单且功能较好,具备可根据输入信号特征自动调参的特点[6]。
自适应滤波算法具有收敛速度快,稳定性好的特点,应用于滤除复杂无规律未知环境中的干扰噪声效果良好,具备一定的普适性[7]。递推最小二乘法(Recursive Least Square,简称RLS)是一种最小二乘法的快速算法,其滤波结构示意图如图3所示。当有用输入信号的分布规律发生变化时,滤波器开始自身调参,改变权值,紧随输入信号的变化规律。

图3 自适应RLS滤波器示意图Fig.3 Schematic diagram of adaptive RLS filter
如图3所示,自适应横向RLS滤波器存在两路输入,一路为输入信号x(n),且x(n)=[x(1),x(2),…,x(N)];另一路为期望信号d(n),其中d(n)=[d(1),d(2),…,d(N)].滤波器冲激响应序列为{w1(n),w2(n),…,wM(n)}.y(n)可表示如下:
(1)
定义期望响应d(n)与输出响应y(n)之间的差为误差e(n),即
e(n)=d(n)-y(n)=d(n)-wTx(n)
(2)
则e(n)的加权平方和即为:
(3)
其中:
w=[w1,w2,…,wM]T
x(n)=[x(n),x(n-1),…,x(n-M+1)]
λ(0≤λ<1)为加权因子,引入的数据越新占的权重越重。
加权平方和最小时可得,
而
所以可得到如下关系式:
(4)
令:
(5)
(6)
将式(5)和(6)代入式(4)得:
Rx(n)w(n)=U(n)
(7)
整理得:
(8)
e(n)=d(n)-wT(n-1)x(n)
(9)
将其代入式(6)可得:
(10)
由于wT(i-1)x(i)xT(i)=x(i)xT(i)w(i-1),所以式(10)又可写为:
(11)
将式(11)代入式(8)可得:
(12)
为实现简化运算,这里设定任一时刻的滤波器参数相同,可得:
w(0)=w(1)=…=w(n-1)
(13)
因此:
w(n-1)
(14)
设定λ=0,可得:
(15)
将式(14)和式(15)代入式(12),得:
(16)
表达式(16)就是一种自适应滤波算法,其参数主要受输入误差的影响。
3 软件设计
在软件方面,车辆宽高检测系统主要可实现以下功能点:首先预处理接收到的传感器信息,经过后台计算后将车辆最高最宽值以及其他基础信息显示到软件界面中,同时与后台设置的相关阈值进行比较,一旦超出阈值设置则发出报警[8-9]。其次系统还具备历史数据查询、相关参数设定等功能模块。如图4所示为激光传感器数据处理流程图。

图4 激光传感器数据处理流程Fig.4 Data processing flow of laser sensor
软件开发利用C#语言加MYSQL数据库的方式。系统可实现对通行车辆的不停车检测,系统为了能够对检测数据进行相应的查询,设计有实时监管数据字段表,实时监管数据字段表如表1所示。
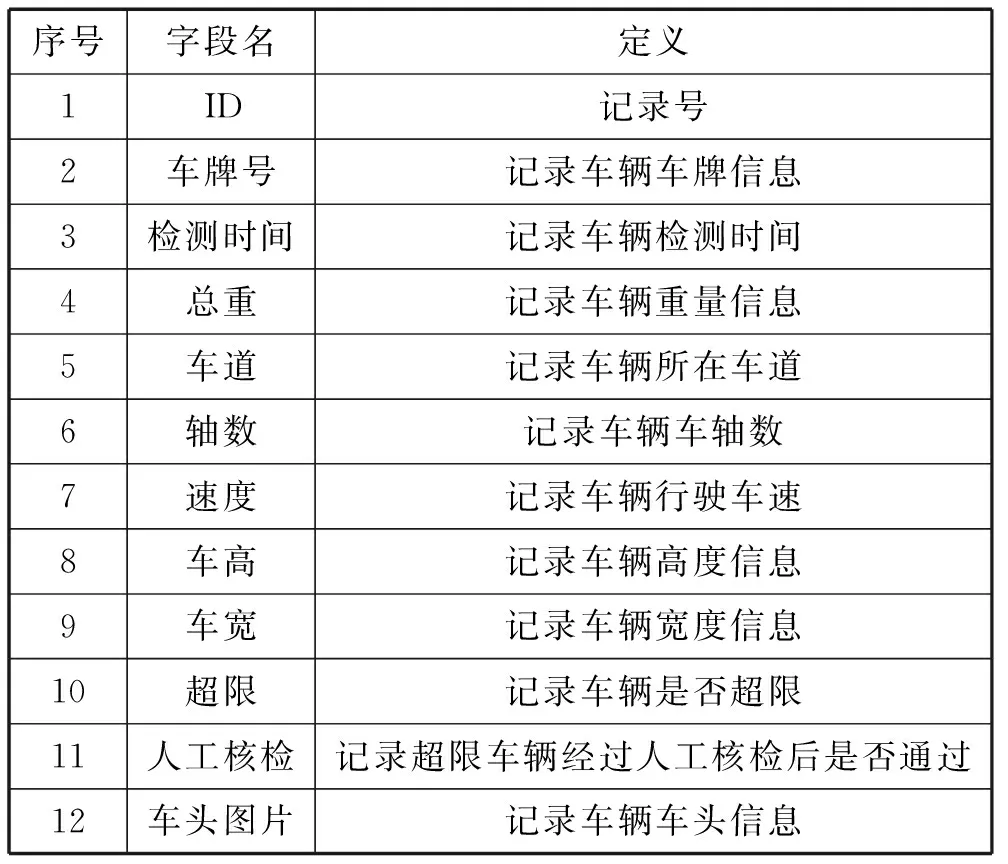
表1 实时监管数据字段表Tab.1 Real time supervision data field table
4 实验结果
如图5所示为系统界面图。按照上面提到的硬件布置及软件处理流程。通行车辆通过检测区,采集设备对车辆相关信息进行采集,数据信息进入软件后台通过算法处理后输出,车辆相关信息可在系统软件中直观显示。
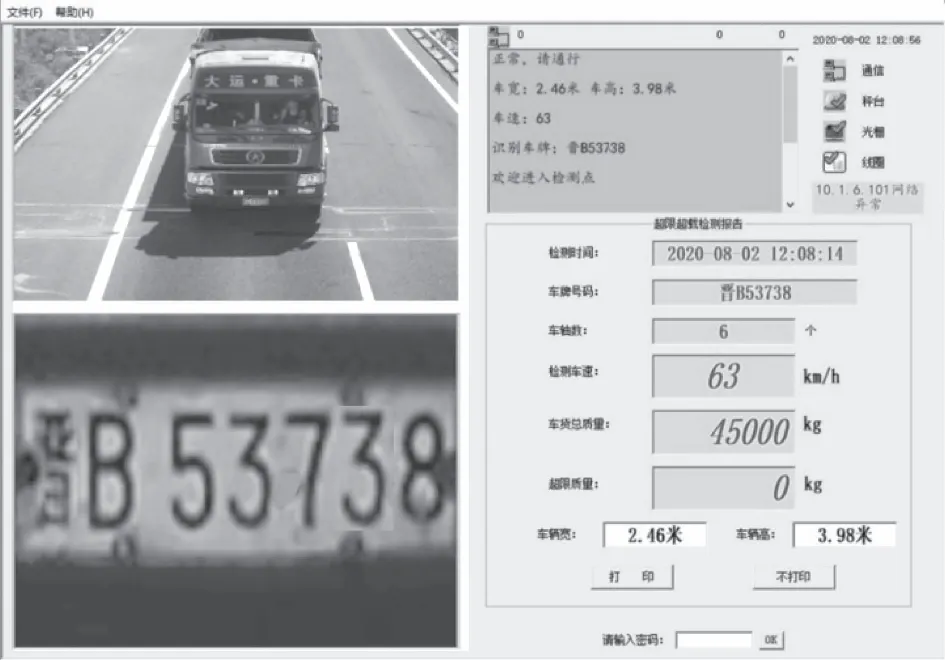
图5 系统界面图Fig.5 System interface diagram
如表2所示为系统后台部分字段相关数据信息。可通过采集的车辆信息与软件中设置的阈值相比较来判断此车辆是否超限。如图6所示为检测现场照片。

表2 部分字段数据Tab.2 Partial field data

图6 现场测试照片Fig.6 Site test photo
5 结论
本研究通过利用激光传感器对车辆宽高信息进行连续扫描,通过后台计算得出车辆最高最宽信息并在系统界面中显示,同时还可自动判断车辆是否超限、是否可通行。在检测过程中,系统通过自适应滤波算法调参,滤除传感器信号内外部因素的影响,实现不停车检测。可有效抑制违规车辆上路造成的损失,具有重要的社会经济效益。
猜你喜欢
客联(2022年4期)2022-07-06
成都信息工程大学学报(2022年2期)2022-06-14
纺织科学研究(2021年1期)2021-12-03
汽车维修与保养(2021年8期)2021-02-16
电子制作(2019年22期)2020-01-14
电子制作(2019年11期)2019-07-04
表面工程与再制造(2019年1期)2019-05-11
时代英语·高一(2019年1期)2019-03-13
儿童故事画报·发现号趣味百科(2016年3期)2016-06-24
儿童故事画报·智力大王(2016年3期)2016-05-05