卫星USB 测控副载波同步算法研究*
2022-06-07 08:56张士伟邢斯瑞常俊德金宇婷沈晨阳
电子技术应用 2022年5期
张士伟,邢斯瑞,常俊德,金宇婷,赵 博,沈晨阳
(长光卫星技术有限公司,吉林 长春 130000)
0 引言
统一S 波段(Unified S-Band TT&C System,USB)测控是目前卫星常用的一种测控方式,对于卫星测控接收机来说,要想正确稳定实现遥控指令的接收,载波同步、跟踪技术是关键,如果同步性能不佳导致误码将使指令变成无效指令,影响卫星的测控效果。
传统载波同步基于锁频环+锁相环的方式,但在实际工程应用中,由于通信距离非常远,接收信号弱,信噪比较差,锁频环跟踪载波频率时振荡较大,锁频环跟踪稳定后转锁相环时,无法保证频差百分百处于锁相环的捕获带内,导致锁相环无法锁定,需要重新进行载波捕获,增加了捕获时间,降低了捕获概率,不适合卫星测控通信的应用[1]。本文给出了一种快速傅里叶变换结合锁相环(FFT+PLL)的方法,可以很好地适用各种卫星测控的应用场景。
1 参数设计
USB 测控将遥控副载波通过调相(Phase Modulation,PM)调制到载波上,一般USB 测控要求的载波多普勒捕获范围为±115 kHz,多普勒变化率为±32 kHz/s[2]。对接收信号下变频至零频并用250 kHz 采样率的1 024 点FFT 对其进行分析,分析频率范围为±125 kHz,分析时间为4.096 ms,频率分辨率为244 Hz,然后通过载波PLL1实现载波的跟踪,解调出副载波信号。当载波实现跟踪后,副载波存在的多普勒频率为:

其中,fsubc_d为副载波多普勒,fsubc为副载波频率,fc_d为载波多普勒,fc为载波频率。计算可得副载波残留的多普勒频率小于±10 Hz,多普勒变化率在±0.2 Hz/s 之间,留有余量设计PLL2 的快捕带为±50 Hz。
2 数字PLL 设计
跟踪PLL 本质是数字二阶锁相环,是由模拟二阶锁相环等效而来,当采用理想积分滤波器时模拟PLL 的S域闭环传递 函数为[3]:H(s)=通过双线性变换,将系统闭环传递函数转换为Z 域系统闭环传递函数[4-6],如下所示:
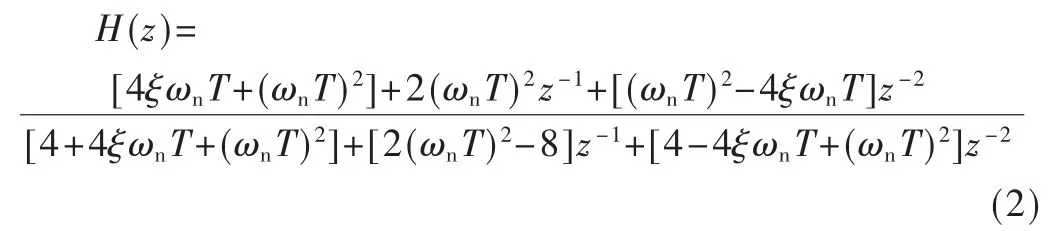
其中,ξ 为阻尼比,ωn为无阻尼振荡频率,T 为环路周期。
数字二阶锁相环由鉴相器、环路滤波器和直接数字合成器(Direct Digital Synthesizer,DDS)组成,准确地建立环路滤波器、DDS、鉴相器的Z 域传递函数对于建立系统闭环传递函数至关重要。在构建二阶环相位模型时,选择具有正弦鉴相特性曲线的鉴相器,该鉴相器的相位增益为1,鉴相输出在±1 之间。下面对环路滤波器和DDS 的Z 域传递函数进行建模。
2.1 DDS 的Z 域相位传递函数
DDS 的组成原理框图如图1 所示[7-9]。
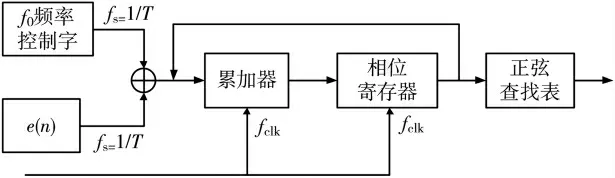
图1 DDS 原理框图
误差信号e(n)引起的DDS 输出频率为:fout=e(n)×fclk/2N,其中fclk为DDS 的工作时钟,相位控制字长为N。假设环路闭环周期为T,即每隔T s 对e(n)采样一次去修正中心频率f0。DDS 的Z 域相位传递函数仅考虑由误差信号e(n)引起的相位变化,nT 时刻输出的相位如下所示:

对式(3)等式两边消去载波标称频率项,并改写为离散形式如下:φ(n)=φ(n-1)+2πe(n-1)fclk/2N·T,则DDS 的相位Z 域传递函数为:H(z)=2πfclk/(2N(z-1))·T,DDS 的相位增益为KDDS=2πfclk/2N·T。
在设计中fclk=3.5 MHz,环路闭环周期选择32 个1/fclk,N=32,则DDS 的传递函数为H(z)=4.61×10-8/(z-1),DDS 的相位增益KDDS=4.61×10-8,输出8 kHz的副载波[10]。
2.2 数字环路滤波器
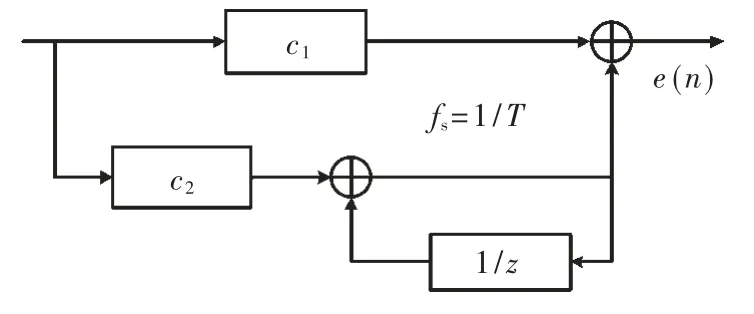
图2 数字环路滤波器Z 域传递函数框图
由每个组成部分可以推出系统的闭环传递函数如下所示:

其中,c1和c2是数字环路滤波器直通支路和累加支路的增益。在保证模拟和数字的闭环传递函数极点相同,可以推出:
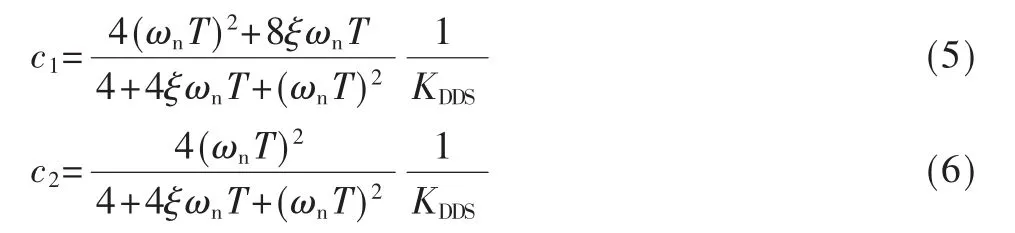
综上,整个PLL 锁相环Z 域传递函数如图3 所示[13]。
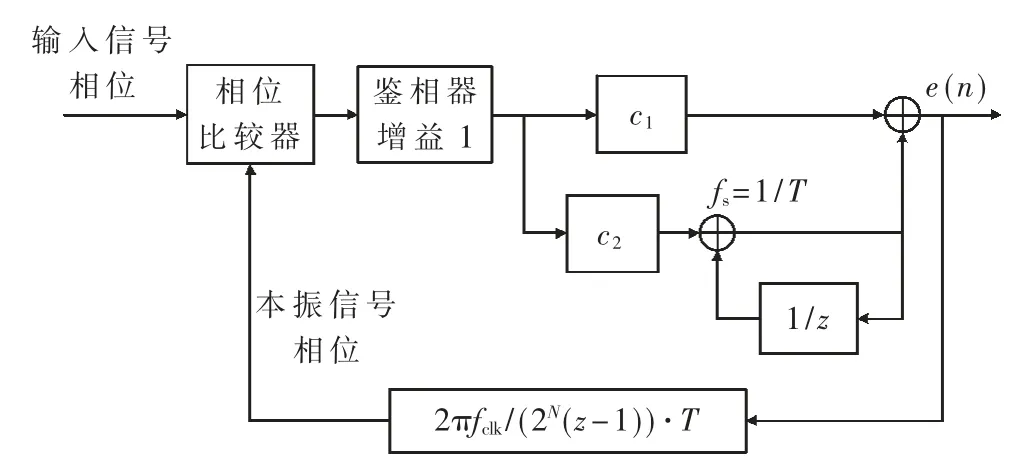
图3 数字PLL 相位模型框图
选择ξ=0.707,±50 Hz 快捕带对应的环路无阻尼自振角频率为ωn=222.18 rad/s,综上环路滤波器系数c1=613 567,c2=88。数字域环路滤波器系数所对应的模拟域系数τ1=T/c2=1.04×10-7,τ2=c1×T/c2-T/2=0.006。
3 数字PLL 分析
PLL 分析包括稳定性分析、信噪比、快捕带及快捕时间、捕获带及捕获时间、同步带及跟踪速率等分析。下面分小节进行介绍。
3.1 稳定性分析
从Z 域对系统的稳定性进行了分析,首先求取了系统的Z 域传递函数闭环极点为0.9986+0.0029i,0.9986-0.0029i,极点位于单位圆内,可以判断系统是稳定的。为了对系统的稳定程度进行量化,绘制了系统的波特图,如图4 所示,包括系统的幅频特性曲线和相频特性曲线,从幅度裕度和相位裕度两个方面进行了求证[14]。其开环幅度穿越频率为55 Hz,与快捕带一致,相位裕度为65.4°,可以看到系统具有良好的稳定性。
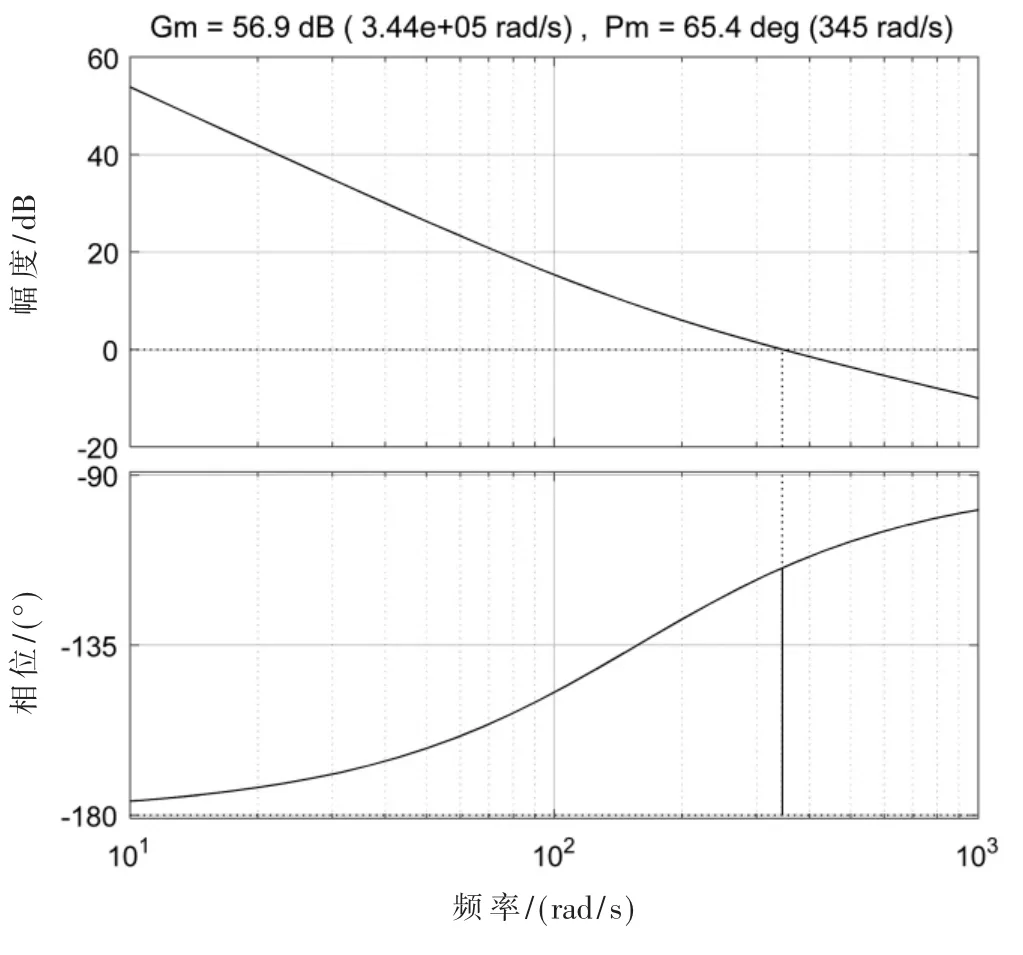
图4 系统波特图
3.2 PLL S/N0 分析
在不同的应用场合,对锁相环恢复的相位误差有不同的要求,该误差与输入信号的信噪比直接相关,经分析,恢复的载波相位标准差为:

其中,2BL为环路的带宽,S/N0为信号功率与噪声谱密度比。在不同的环路带宽下,相同的同步精度所需的S/N0也不同,具体如图5 所示,可以根据实际情况进行参数选择。
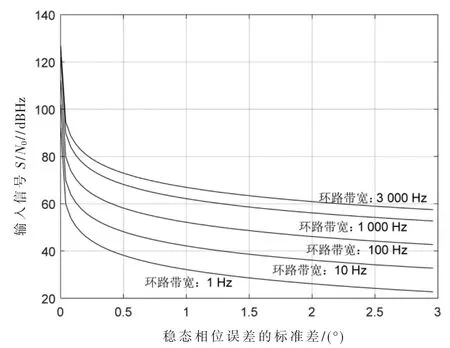
图5 S/N0 与稳态相差
3.3 快捕带及快捕时间
快捕带与环路滤波器的设计是息息相关的,鉴相器的输出是幅度为1 的差拍信号cos(2πΔft+φ),其中Δf 为输入信号频率和本振信号频率的差频,如果该差拍信号经过环路滤波器得到的误差信号控制DDS 得到的频率增量为这个差拍频率,则该差频为PLL 的快捕带,通常PLL 的工作频率范围限制在快捕带内[15]。环路滤波器的频率响应为:

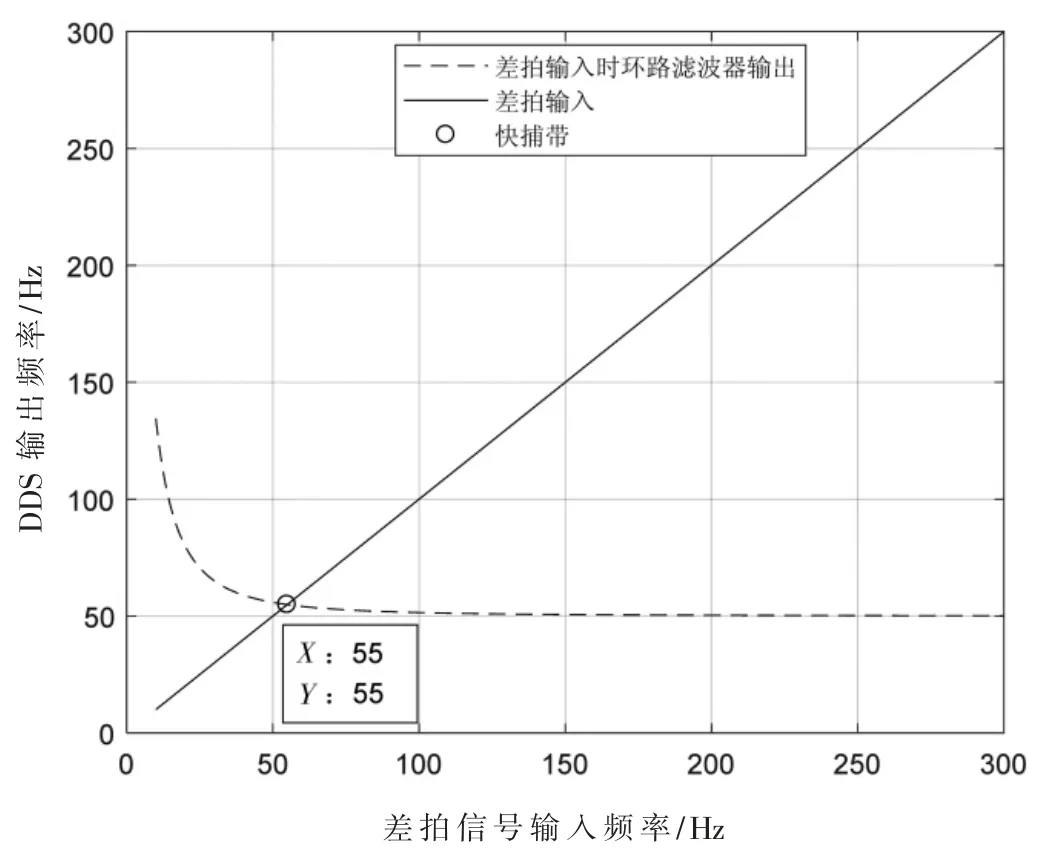
图6 快捕带的仿真结果
当响应的包络线进入允许误差范围内之时,二阶系统的单位阶跃响应曲线必然也处于允许误差范围内,因此通过如下公式可求得系统的过渡时间(即快捕时间):

当Δ=1%时,tkuaibu≈5/(ξωn)=0.031。图7 为仿真的结果,快捕时间为0.031 s,可以看到实际仿真结果与理论一致。
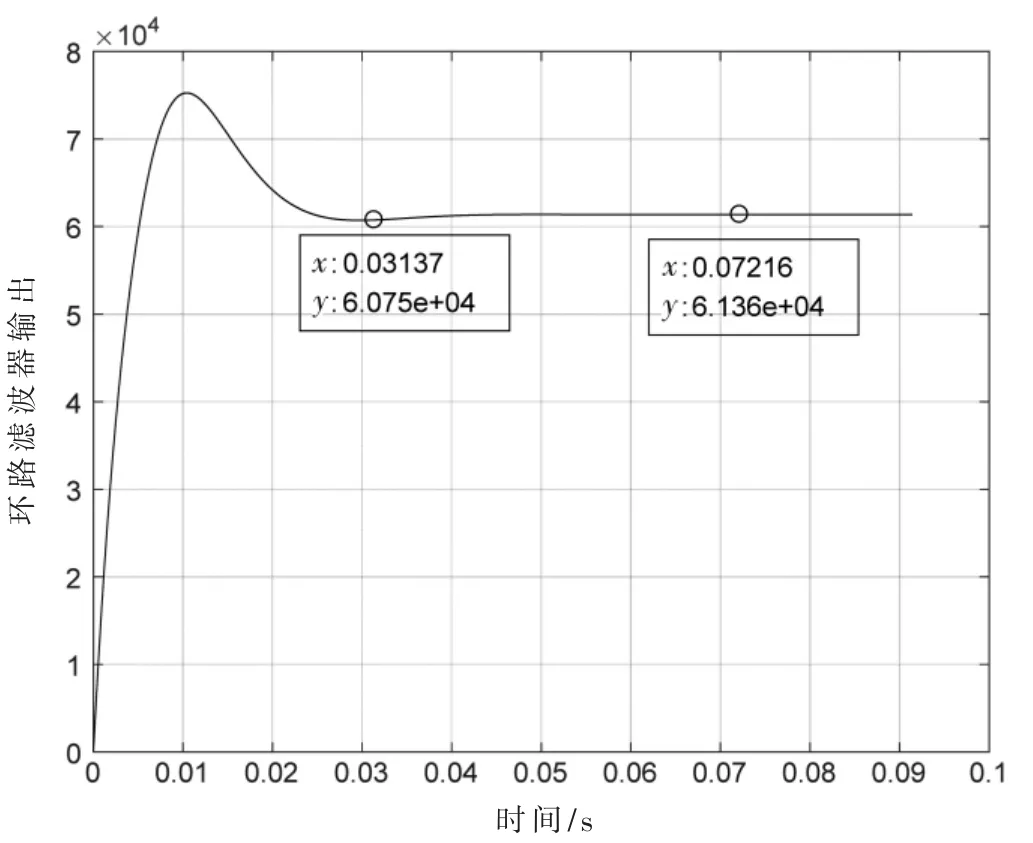
图7 输出频差50 Hz 时误差响应曲线
3.4 捕获带及捕获时间
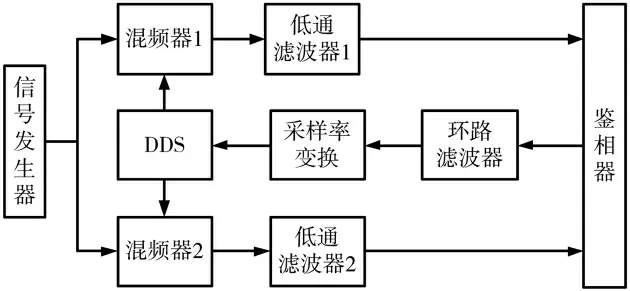
图8 频率模型
图9 中给出了初始频差从200~1 100 Hz 时的频率牵引时间,可以看到相位模型和理论计算的结果一致,频率模型由于在环路处理时引入低通滤波等额外的延迟环节,使pull-in 时间增加。
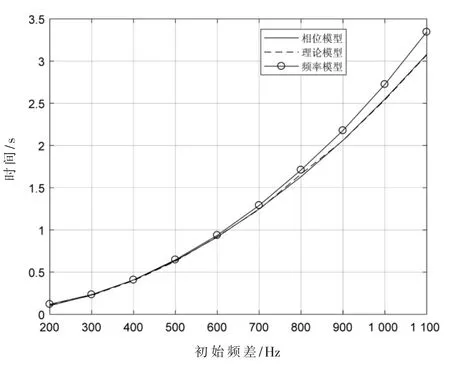
图9 频率牵引时间与初始频差
图10 中给出了理论及引入4、8、12、16 阶延迟环节pull-in 时间情况,为了减少频率牵引时间,可以使用阶数较小的IIR 滤波器以减小延迟环节加速捕获时间。
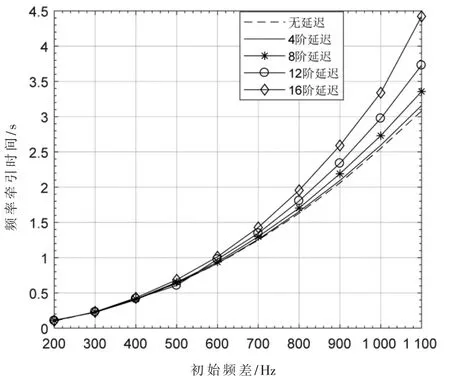
图10 延迟环节对频率牵引时间的影响
3.5 同步带及最大同步速率
在环路锁定时,缓慢增加固有频差,直到环路失锁,能够维持环路锁定的最大固有频差称为同步带。环路锁定时,瞬时频差等于0,控制电压为直流。对于正弦鉴相特性的环路,有Δω0=KDDSH(j0)sin(θe(∞)),其中θe(∞)为稳定相位误差,当θe(∞)=π/2 时,得到维持环路锁定的最大固有频差,所以理论上二阶环的同步带可以∞。对于正弦鉴相特性的锁相环路,当输入信号为频率斜升信号时其相位为θI(t)=0.5×R×t2,R 为频率扫描速率。环路锁定后稳态相位误差为一固定值θe(∞)=arcsin(R/),即稳态相差与扫描速率R 和系统的无阻尼自振角频率相关。当扫描速率小于时θe(∞)=arcsin(R/)方程有解,也就是理想二阶环的最大同步扫描速率为Rmax=,远大于副载波多普勒变化率±0.2 Hz/s。
综上,该算法快捕带为±55 Hz,快捕时间仅为0.03 s,相位裕度为65.4°,在输入信号的信号功率噪声谱密度比S/N0=60 dBHz,相位误差标准差约0.5°。
4 结论
本文给出了一种卫星USB 测控副载波同步算法,该算法具有捕获快、跟踪精度高、稳定性好、易于数字化实现的特点。同时该算法具有通用性,仅需根据要求适当调整参数即可,已在多颗吉林一号卫星的测控系统中得到应用。
猜你喜欢
农业工程学报(2022年13期)2022-10-09
灌溉排水学报(2022年6期)2022-07-13
河北工业大学学报(2021年4期)2021-09-23
通信技术(2020年12期)2020-12-23
水泥工程(2020年4期)2020-12-18
电动工具(2020年4期)2020-08-20
陶瓷学报(2019年6期)2019-10-27
电子制作(2019年15期)2019-08-27
现代防御技术(2017年2期)2017-05-13
舰船电子工程(2014年3期)2014-11-23