
一种基于北斗+5G的联合定位系统
2022-06-02 06:57薛嘉琛武建锋焦喜康
无线电工程 2022年6期
薛嘉琛,武建锋*,焦喜康,刘 源
(1.中国科学院国家授时中心,陕西 西安 710600;2.中国科学院大学 电子电气与通信工程学院,北京 100049)
0 引言
近年来,随着科学技术的发展,导航技术也在更新换代,在生产生活中发挥着重要的作用[1]。但因为卫星导航系统本身的局限性,在定位过程中常会受到信号干扰、地形遮挡和多径效应等,尤其是在城市峡谷中,卫星信号强度会大幅降低,从而导致定位精度受到影响而不能满足特殊情况下的定位需求,因此,解决复杂环境下的定位精度问题势必会成为未来导航系统发展的研究热点[2]。随着第五代移动通信技术 (5G) 时代的到来,以毫米波通信为代表的技术得到了日益广泛的关注[3]。5G毫米波信号的带宽大、频率高、时延短,并且信道稀疏,能够为基于到达时间 (Time of Arrival,TOA) 和基于到达时间差(Time Difference of Arrival,TDOA)的定位提供更加准确的测量值[4],当可见卫星数不足以得到定位结果时,在测试区域内部署定位5G基站[5],利用5G定位技术同卫星定位技术相结合进行联合室外定位是一种有效的解决途径[6]。目前这项技术还处于发展状态,业界普遍都看好其广阔的发展前景[7-10]。有专家和学者对这项技术的发展和演进进行了归纳和梳理[11-12],也有一些科研单位和机构针对不同应用领域对北斗与5G的融合进行了探索与尝试[13-15],包括复杂环境下的定位方法以及室内外融合等。但大多都着眼于理论的阐述,未给出更为具体的实践。本文将针对室外条件下,介绍一种基于北斗卫星导航系统和5G定位技术的联合定位系统。在5G方面,基于5G新空口中定义的专门为定位功能设计的定位参考信号(Positioning Reference Signal,PRS),辅以满足低时延的时间同步设备,得到高精度5G定位数据,在联合定位算法方面,利用最小二乘拟合算法迭代得到最佳的拟合数据。本系统是导航定位和通信融合发展的一大尝试和探索。
1 系统构成及介绍
北斗+5G联合定位系统主要由5G定位网络、时间同步设备和接收终端3部分组成,如图1所示。首先在测试区域中构建5G定位网络,以一组5G基站构成,其中一个是参考基站。利用基站在测试区域中建立笛卡尔坐标系,接收终端置于测试区域的范围内,通过接收5G基站的定位数据实时解算相对定位数据,再和同时接收到的北斗卫星信号解算出的坐标进行融合计算,得到最终的定位结果。
其中,时间同步设备保证5G基站间的定位一致性,防止产生时间上的差异导致定位不同步,定位结果产生误差[16]。5G基站精细定位要求同步精度在±3 ns左右,本系统的时间同步设备是由国家授时中心自主研发,将同步以太网(SyncE)加入PTP技术中,利用时钟数据嵌入和恢复技术,实现频率的双向传递,可提高同步精度。WR(White Rabbit)协议又加入了全数字双混频鉴相器(DDMTD)技术,实现时钟主从端的相位测量和跟踪锁相,消除累积钟差,再次提升了同步精度,满足5G对高精度时间同步的要求.通过18 h的测试,同步精度可达到2 ns以内,满足5G基站精细定位同步精度的要求[17]。

图1 北斗+5G联合定位系统组成Fig.1 Composition of Beidou+5G joint positioning system
目前基于5G技术的定位方法有很多,本系统采用三边定位中根据TDOA的方法进行定位,这也是目前相对定位技术中被广泛采用的位置估计算法之一,基于蜂窝系统的TDOA技术已经日益成熟。
而在5G信号体制的设计上,由于通信信号的设计过程未考虑定位功能,因此需要在通信系统的信号体制设计过程中考虑定位功能,同时实现具有高速数据传送与高精度定位复合功能的通导一体化系统,形成通信导航的深度融合。目前,主流的2种基本解决方案是为带内参考信号和共频带信号,并可与北斗/GPS等定位技术融合。本系统采用了带内参考信号的信号体制设计,PRS是专门为5G带内无线定位功能设计的信号。Rel-16完成了专用于下行定位的PRS的标准化定义。专用PRS可使终端同时接收多个基站发出的信号,从而利用三角定位原理解算终端的位置。为了解决邻区干扰问题,3GPP标准通过PRS分别从频域和时域上对相邻小区的PRS信号进行协调,以降低由不同基站发出的PRS的相互干扰。
2 系统定位原理
2.1 北斗+5G联合定位原理
在城市、矿井和树林等有遮挡的环境中,由于卫星信号受到遮挡时衰减严重,此时终端可视北斗卫星数目不足4颗,这时加入5G基站的测量数据参与定位解算,弥补卫星不足的情况。这也就是北斗+5G联合定位系统的应用场景。
对于2个系统的定位数据融合,为保证联合定位系统的精度,采用最小二乘拟合的算法来处理测量数据,下面先建立北斗+5G联合定位模型,利用分析结果加上最小二乘算法进行迭代计算,当收敛误差小于判决门限时即为最后的定位结果。
北斗卫星导航系统是基于TOA估计进行操作,以确定用户位置[18]。在一般情况下,利用3颗卫星就可组成3个基于星站距离的公式,组成方程组就可解算出用户观测站的空间位置(x,y,z)。在现实定位过程当中,卫星时钟与接收机时钟之间也存在偏差。所以,有必要把该误差也作为未知量引入方程组一并计算:
,
(1)
式中,ρi为卫星到接收机的空间伪距;(x,y,z) 为待求卫星接收机的坐标;δ为卫星的时钟与接收机时钟之间的误差与速度乘积;(xi,yi,zi)为北斗卫星的空间坐标;i为观测到的卫星序号。
而在5G定位理论中[19],假设ti(i=1,2,3,…,L)是基站i与标签之间的到达时间,Δti是基站i与标签之间的等效时钟误差,由此可以计算出基站i与接收终端之间的伪距。若(xi,yi)是基站i的实际位置坐标,(x,y)是标签的定位坐标,c为电磁波的传播速度,则TOA方程为:
(2)
每2个TOA方程,即每2个标签与基站的伪距方程即可决定一条双曲线,因此当所有基站满足5G精细定位要求时,即Δti-Δtj≈0(i≠j)时,由式(2)可以得出一组双曲线方程组。双曲线的交点就是接收终端的位置,因此通过求解式(3)便可以得到终端的定位坐标:
di-dj=c(ti-tj)(i,j=1,2,3,…,L;i≠j),
(3)

基于上文,可建立如下模型进行推导:在定位目标附近的水平面内任选一点为原点,建立笛卡尔坐标系,设目标的坐标为(x,y,z),钟差变量为δ,M个北斗卫星的坐标分别为(xs1,ys1,zs1),(xs2,ys2,zs2),…,(xsM,ysM,zsM);N个5G基站的坐标分别为(xb0,yb0,zb0),(xb1,yb1,zb1),…,(xbN,ybN,zbN)。其中,(xb0,yb0,zb0)为参考基站坐标,因此可以建立联合定位数学模型如下:
(4)
用观测向量的形式描述定位模型如下:
Y=h(X)+V,
(5)

对函数h进行全微分处理可得:
dY=HdX,
(6)
式中,H为h的雅可比矩阵:
(7)
根据式(6),可知dY与dX满足线性关系,且X中的待求量个数小于Y中的观测向量个数,可以采用最小二乘法中的高斯-牛顿迭代法,它的基本思想是使用泰勒级数展开式去近似地代替非线性回归模型,然后通过多次迭代,多次修正回归系数,使回归系数不断逼近非线性回归模型的最佳回归系数,最后使原模型的收敛误差平方和达到最小。
根据式(5)可以写出联合定位模型收敛误差R的平方和为:
S=RTR=(Y-h(X))T(Y-h(X))。
(8)
若想使得S最小,要求最小值,即S对X的偏导数等于0:
(9)
整理后可得O-2HTY+2HTh(X),即:
-2HTR=0。
(10)
X≈X(k+1)=X(k)+ΔX,
(11)
式中,k为迭代次数;ΔX为迭代矢量。可以看出迭代函数是线性的,因此将h(X)在X(k)处用泰勒级数展开并保留一阶项:
(12)
h(X(k+1))≈h(X(k))+H(k)ΔX。
(13)
此时ΔY=Y-h(X(k)),故收敛误差可以表示为:
R(k)=ΔY-H(k)ΔX。
(14)
将式(14)代入式(10)中可得:
-2HT(k)(ΔY-H(k)ΔX)=0,
(15)
化简得:
HT(k)ΔY=HT(k)H(k)ΔX。
(16)
最终迭代公式为:
X(k+1)=X(k)+(HT(k)H(k))-1HT(k)ΔY。
(17)
通过多次迭代,当收敛误差小于判决门限时,得到的结果即为联合定位的最终结果。整体融合解算流程如图2所示。
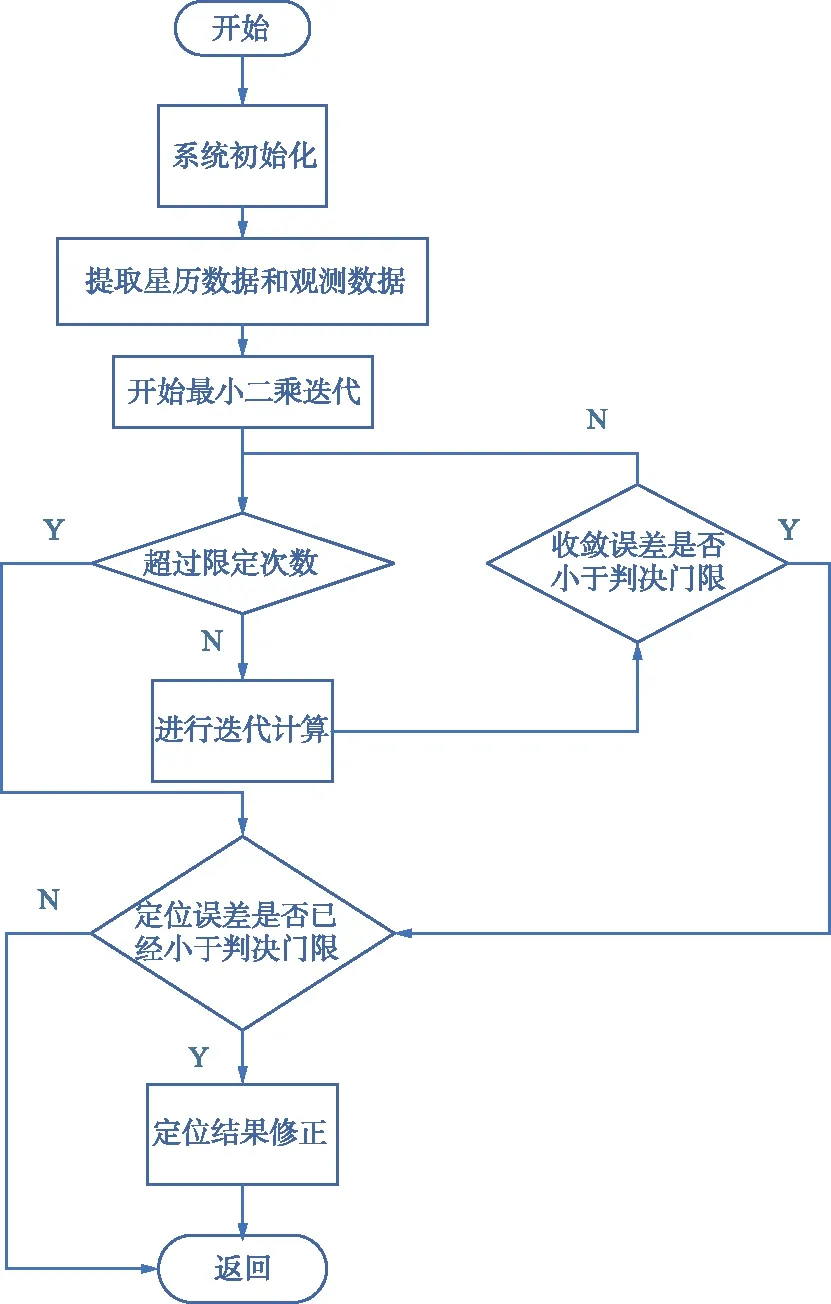
图2 融合解算流程Fig.2 Integrated settlement process
2.2 仿真结果与分析
模拟一种在卫星信号受到遮挡或者严重干扰的场景,如图3所示,在一个50 m×50 m的区域中按照“V”字型的分布设置3个5G基站,并建立笛卡尔坐标系,坐标分别为(0,0,0),(-24,20,6)和(25,18,7)。

图3 仿真区域Fig.3 Schematic diagram of simulation area
在仿真中假设区域内卫星的条件。此时卫星的PDOP值及可见卫星数随时间的变化如图4所示,可见卫星数如图4(a)所示,此时的可见卫星数较少,PDOP值如图4(b)所示,PDOP平均值在11左右,卫星定位性能下降。
为了验证联合定位系统的定位效果,在图3所示场景中选择一点A,点A应尽量靠近3个基站的几何中心,理论上此处的PDOP值最小,进而可获得最好的定位效果。对点A进行10 min的联合定位观测,同时记录卫星单点定位的定位结果进行对比,并对每次的数据计算均方根误差(Root Mean Squared Error,RMSE),得到仿真结果如图5所示。仿真误差如图5(a)所示,可以看到在该场景下,北斗单点定位误差较大,RMSE约为6.115 m;标准差为0.579,浮动较大。与5G基站进行联合定位后的结果有了明显的改善,RMSE约为3.934 m;标准差为0.317,联合定位的PDOP值如图5(b)所示,对比图4(b)也有了一定的改善,平均值在8~9。因此可以初步推断,联合定位系统在复杂环境下对定位性能有一定的提升。
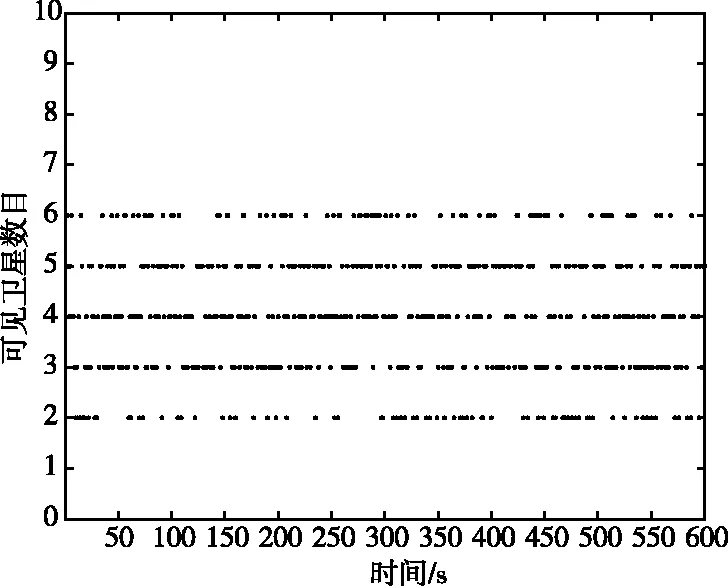
(a) 可见卫星数目
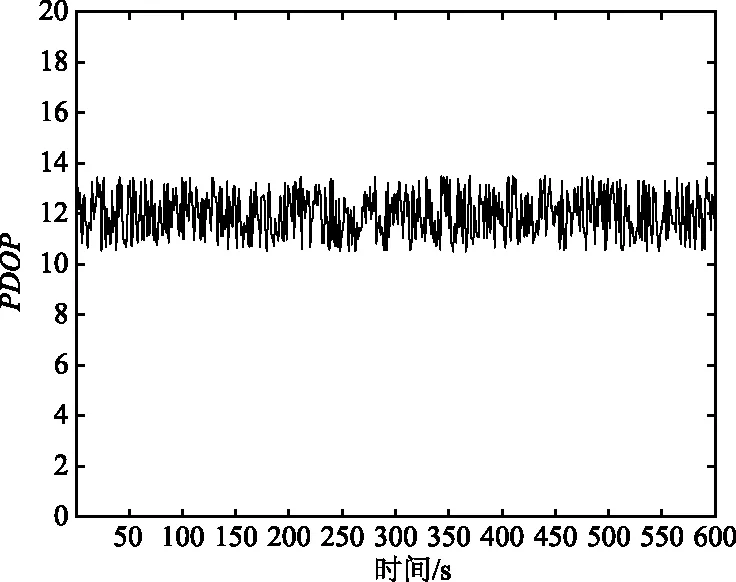
(b) PDOP值

(a) 联合定位系统仿真误差曲线
3 实验及数据分析
基于上文的研究,采用中国科学院国家授时中心开发的“北斗+5G”联合定位终端系统。在国家授时中心航天基地场区搭建了测试的环境,部署了4个5G增强型定位节点,节点在测试环境内均匀分布,用于5G相对定位解算与定位数据的传递。此外,为便于测试结果的处理,在测试区域内使用RTK高精度定位设备测出了多个参考点位便于对照,测试环境平面示意图如图6所示,红色点位表示在室外搭建的5G定位基站,共有4个,黑色点位表示参考点位,共计13个。
3.1 5G信号测量误差分析
在进行联合定位之前,首先对5G基站的定位性能进行评估。主要指标有伪距精度和平面误差等。通过多重指标来综合评价定位性能。
本系统5G基站采用TDOA的方式,因此将单次定位过程中的每个基站的伪距抖动作为统计量进行分析,为消除钟差、多径等无关因素的影响,首先对伪距量进行最小二乘拟合,减去每个点的拟合函数值,只保留伪距量的抖动特性。求出其标准差即可作为当前基站伪距抖动值。
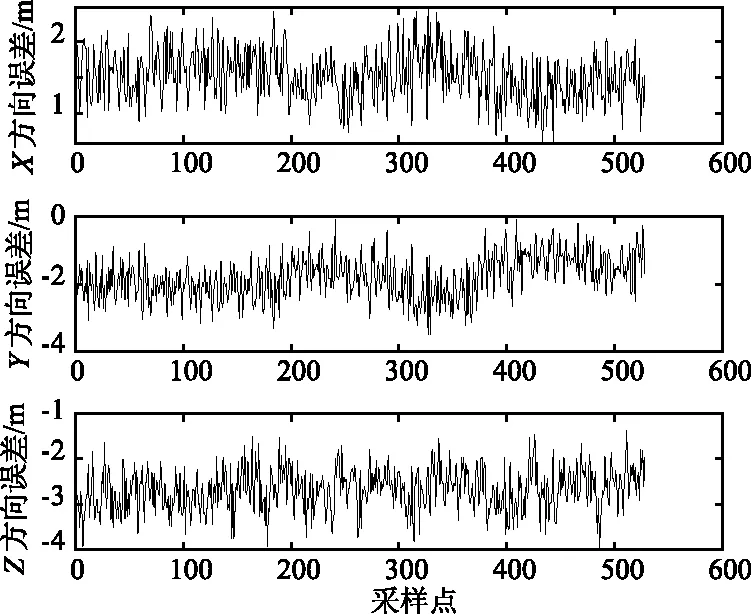
选取3个点进行10 min的观测。统计定位精度,计算2#,3#,4#基站相对于1#基站的伪距差,形成TDOA观测量,并统计伪距抖动,得到定位结果如图7所示,其中,观测坐标点分布如图7(a)所示,误差曲线如图7(b)所示,伪距变化如图7(c)所示。

(a) 坐标测量点分布

(b) 定位误差曲线

(c) 伪距变化曲线
对上述数据的统计结果如表1所示。
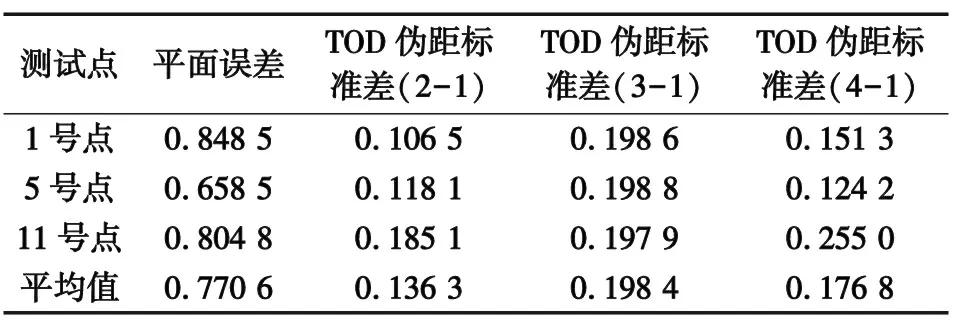
表1 5G定位统计结果
通过对5G信号测量误差的统计分析,可以看到伪距抖动普遍优于0.2 m,平面定位误差约为0.771 m。总体定位性能较优,除上面的考虑因素外,对于时间同步造成的误差在上文已经提到,在基本满足了5G精细定位的要求下,对结果造成的干扰较小。在室外条件下,多径效应带来的误差也相对比较小。结合仿真分析,使用5G定位来提高复杂环境下的定位精度是有可行性的。
3.2 联合定位测试及分析
在实地测试中,采用2卫星+3基站及3卫星+2基站的联合定位方式,从测试结果中选取图6中两参考点:5号点和11号点的静态观测结果如图8和图9所示,其中,图8为5号点的静态误差曲线,图8(a)的RMSE为3.019 m,图8(b)的RMSE为3.667 m;图9为11号点的误差曲线,图9(a)的RMSE为3.328 m,图9(b)的RMSE为3.883 m。综合来看,在静态定位中,本系统综合误差稳定在3 m左右,精度比较高。从误差曲线上可以看出,定位结果的变化稳定,在数据处理过程中均采用了3σ原则来滤除粗大数据。

(a) 2s+3b
(b) 3s+2b
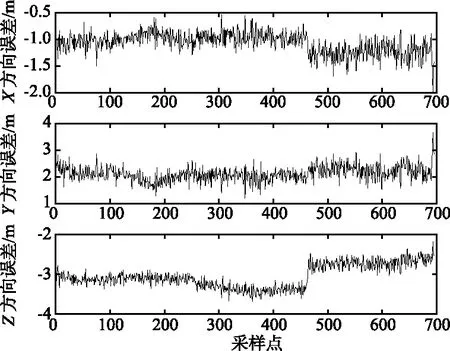
(a) 2s+3b

(b) 3s+2b
针对动态测试搭建场景进行测试。在测试区域内,将系统的接收系统集成到一台推车上,使其沿一定路线移动从而进行定位测试。测试结果如图10和图11所示。

(a) 2s+3b动态定位数据轨迹

(b) 2s+3b动态定位误差曲线
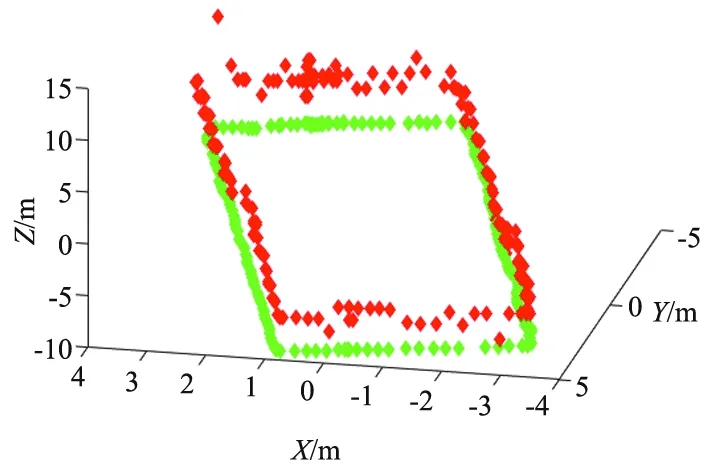
(a) 3s+2b动态定位数据轨迹

(b) 3s+2b动态定位误差曲线
2星+3站的动态定位轨迹如图10(a)所示,绿色路线代表RTK参考数据,红色路线代表联合定位系统的测试数据。其误差变化如图10(b)所示,RMSE为4.077 m;3星+2站的动态定位轨迹如图11(a)所示,其误差变化如图11(b)所示,RMSE为4.935 m。动态测试的精度虽低于静态测试,但总体测试效果还是比较好的,能够明显地观察到测试过程的移动路线。另外,在动态测试中主要的误差来源是高程,这也是定位系统中棘手的问题;联合定位系统与RTK定位设备的钟差也存在着偏差,可能导致2个系统的观测数据时标未对齐从而导致误差的产生。
4 结束语
本文通过对一种北斗+5G的联合定位系统的介绍以及原理分析,提出一种联合定位算法,将北斗定位数据与5G定位数据进行融合解算,得到的定位结果与参考坐标进行误差分析。实验表明,选择定位方式为2星+3站以及3星+2站时,静态定位的平均误差在3.14 m左右,动态定位的误差在4.51 m左右。也验证了在北斗卫星信号质量较差时通过5G定位技术的辅助可以实现一定精度范围内的定位,能够从某种程度上对定位范围进一步扩展,具有一定的应用前景。
但是系统仍有进一步提升的空间,除了上述分析的5G信号测量误差外,还有其他的一些问题,如联合定位算法存在进一步优化的可能、北斗卫星接收机可采用精密单点定位的方式提高精度以及在动态测试中消除系统与RTK参考设备的时标偏差等。
另外,联合定位系统的应用场景主要针对室外,在未来会将其应用扩展至室内。未来将继续研究,不断改进系统,提升性能。
猜你喜欢
地理空间信息(2022年10期)2022-10-31
小哥白尼(神奇星球)(2022年3期)2022-06-06
中国新通信(2022年4期)2022-04-23
导航定位学报(2021年5期)2021-10-13
导航定位与授时(2021年3期)2021-05-18
导航定位学报(2021年2期)2021-04-22
恋爱婚姻家庭·青春(2019年9期)2019-12-10
当代陕西(2019年18期)2019-10-17
恋爱婚姻家庭(2019年26期)2019-09-14
探索科学(2017年4期)2017-05-04
