
重庆地铁6号线车辆法维莱制动系统电空混合故障分析及优化措施
2022-05-31 05:20刘恩鹏
工程与试验 2022年1期
刘恩鹏
(重庆市轨道交通(集团)有限公司,重庆 401120)
1 引 言
重庆B型地铁列车采用车辆与地面变电站紧密配合的再生制动能量吸收反馈系统,实现再生制动能量吸收利用。在列车制动时,采用电制动与空气制动实时协调配合、电制动优先使用、空气制动延时投入的混合制动方式。当电制动不足时,优先在拖车上补充空气制动,即电空配合采用“电制动优先,当电制动不足时,先补拖再补动”的控制模式,以最大效率地利用电制动,从而降低车辆运营维修成本。
目前,重庆轨道所有地铁车辆全部采用电空混合制动模式,以最大程度利用电制动,从而降低运营维护成本。重庆地铁6号线法维莱制动系统车辆在下雨天正线运营时,经常出现因车辆超速而导致信号系统触发紧急制动的问题。前期因装设有法维莱制动系统的列车数量较少,未对正线运营造成较大影响。然而,自2019年5月开始,重庆地铁6号线又新增了21列法维莱制动系统列车。新增的21列地铁列车与既有车辆存在较大区别,使得该问题日益突出,从而迫切需要得到及时解决。
2 法维莱制动系统电空制动控制
空气制动系统是能在司控器、ATO或ATP的控制下对列车进行阶段或一次性制动与缓解的设备。重庆地铁6号线部分车辆采用法维莱生产的EPAC2架控制动控制系统,该系统反应迅速、操纵灵活、能与电制动混合使用,兼具防滑控制、紧急制动、常用制动等功能。
重庆地铁6号线列车制动采用电制动与空气制动实时协调配合、电制动优先使用、空气制动延时投入的混合制动方式。当电制动不足时,优先在拖车上补充空气制动。
全列车交叉混合制动时,当总的电制动力能够满足全列车制动力的需求时,各车都不需要补充空气制动;当总的电制动力不满足全列车的制动力需求时,则先在拖车上根据拖车载荷来补充剩余所需要的制动力。如果总的电制动力大于动车所需要的制动力,动车上不需要补充空气制动;如果总的电制动力不满足动车所需要的制动力需求,拖车根据本车的载荷施加本拖车所需求的制动力,动车所需要空气补充的制动力也按拖车载荷比例分配到拖车上,即由拖车的空气制动进行补充。拖车上施加的总空气制动力受黏着极限限制,拖车上的空气制动力未达到极限时,动车上不需要补充空气制动;当拖车上的空气制动力达到极限时,剩余所要补充的制动力平均分配到动车的空气制动上,每辆动车上所施加的电制动力和空气制动力的总和同样受黏着极限限制。
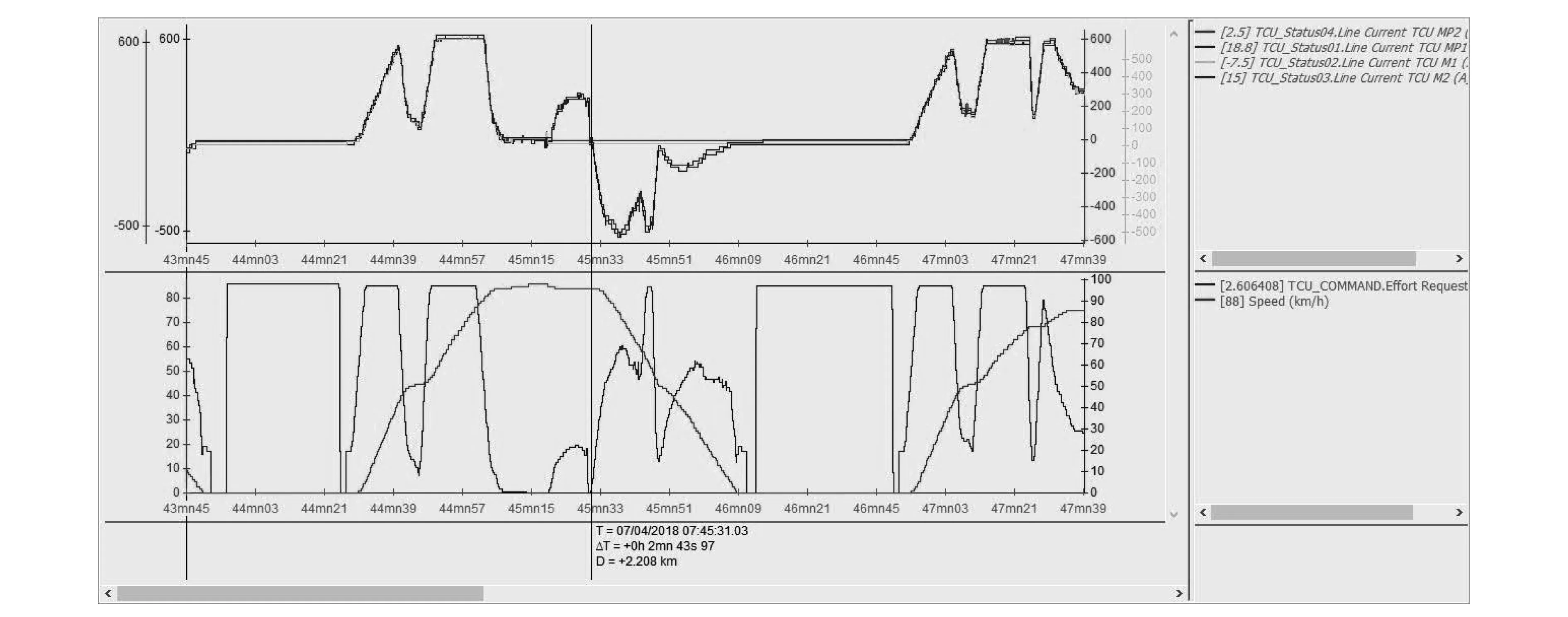
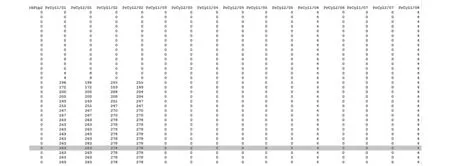
交叉混合制动由主EPAC2根据网络系统通过MVB网络发送给主EPAC2的制动信息进行制动计算。假设列车总制动力为F(train),动车的电制动力分别为Fed(2)、Fed(3)、Fed(4)、Fed(5),则:当Fed(2)+Fed(3)+Fed(4)+Fed(5)≥F(train)时,各车均不需要补充空气制动;当Fed(2)+Fed(3)+Fed(4)+Fed(5) (1)在拖车上施加的总空气制动力未达到拖车的黏着极限时,剩余的制动力全部补充在拖车上,动车上不补充空气制动; (2)在拖车上施加的总空气制动力超过黏着极限时,剩余的制动力平均分配到其余动车上; (3)单个动车上所施加的电制动力和空气制动力的总和受黏着极限限制。 针对列车运营期间因雨天空气制动进行防滑保护从而产生超速紧急制动的问题,通过对车辆ER(事件记录仪)数据(如图1所示)进行分析,从而找出根本性的解决方案。根据图1,ER故障记录数据列举了其中1个事件,分析如下:7∶45∶31,列车给出制动命令,M1及MP2车未正常发挥电制动力。 图1 ER数据(电制动力分布) 图1中,第一栏的曲线Line Current TCU MP2为MP2车牵引/电制动电流(坐标上曲线为正代表牵引电流),曲线Line Current TCU MP1为MP1车牵引/电制动电流(坐标上曲线为负代表电制动电流);第二栏的曲线Speed为速度(km/h);曲线TCU_COMMAND.Effort Request为级位信号(此级位信号只有大小,不能反映是牵引还是制动状态,但可以结合牵引电流的正负值得出是牵引状态还是制动状态)。 EPAC2空气制动压力如图2所示。图中,PrCyl1/01为1车(拖车)1架EPAC2控制的1轴制动缸压力;PrCyl2/01为1车(拖车)1架EPAC2控制的2轴制动缸压力;PrCyl1/02为1车(拖车)2架EPAC2控制的1轴制动缸压力;PrCyl2/02为1车(拖车)2架EPAC2控制的2轴制动缸压力。根据图2数据可以得出,拖车施加了空气制动,所有动车均未施加空气制动力。 图2 EPAC2空气制动压力 由图1及图2数据可以得出,电制动力不能正常发挥的动车,该动车的电制动力将完全由拖车的空气制动力代替。不能正常发挥电制动力的动车,EPAC2仍视其为“动车”。由此,可分析得出以下两点问题产生的根本原因: (1)拖车严重打滑的原因。雨天路面湿滑,列车运营时,制动优先采用电制动,但当某个电制动滑行超时后,EPAC2发出“ED-inhabit”信号,切出对应牵引系统的电制动,切除的电制动由拖车(TC1/TC2)代替。此时,切除的电制动力全部由拖车(TC1和TC2)取代。若电制动滑行的动车较多,将会切除更多动车的电制动力,从而,在TC1和TC2将会补充更多的空气制动力来取代被切除的电制动力,但因路面黏着条件较低,将极大地增大TC1和TC2空气制动滑行的概率。 (2)信号系统超速紧急制动的原因。因信号系统采集车辆速度的传感器(OPG)仅安装于拖车的第4根轴,若拖车发生了严重滑行,必定会导致OPG采集的车辆速度信号失真。为确保精准控车,信号系统会采取减小制动力或施加牵引力的方式对列车实施控车,此时极易导致列车超速,从而触发超速紧急制动。 根据上述故障分析,正线进行了多次滑行故障模拟,故障现象重现且与故障列车状态完全一致。明确了故障原因后,对重庆地铁6号线所有法维莱制动系统列车进行了相关排查,发现所有法维莱制动系统列车均存在上述问题。因此,产生该问题的根本原因是法维莱制动系统的电空混合控制策略存在设计缺陷。 为及时消除故障隐患,保障正线安全行车,重庆地铁6号线针对川仪车实施了采用手动驾驶的临时处理方案,并通过修改车辆网络系统软件程序的方式彻底解决了上述ATO模式失效问题。针对重庆地铁6号线法维莱制动系统电空混合控制策略存在设计缺陷的问题,对制动系统的电空混合控制策略进行了修改,并完成了软件的修改工作。修改后的电空混合控制策略如下: 假设列车总制动力为“F(train)”,动车的电制动力分别为Fed(2)、Fed(3)、Fed(4)、Fed(5),则:当Fed(2)+Fed(3)+Fed(4)+Fed(5)≥F(train)时,各车均不需要补充空气制动;当Fed(2)+Fed(3)+Fed(4)+Fed(5) (1)在拖车上施加的总空气制动力未达到拖车的黏着极限时,剩余的制动力全部补充在拖车上,动车上不补充空气制动; (2)在拖车上所施加的空气制动力超过黏着极限时,剩余的制动力平均分配到其余动车上; (3)单个动车上所施加的电制动力和空气制动力的总和受黏着极限限制; (4)故障的动车或不论任何原因不能发挥电制动力的动车均统一被视为“拖车”。 目前,重庆轨道交通B型地铁车辆均采用电空混合控制模式,以降低日常运营维护成本,车辆制动系统与信号系统的协调配合至关重要。由于重庆地铁6号线法维莱制动系统针对电空混合控制“先补拖再补动”的控制策略存在设计缺陷,从而导致雨天列车正线运营时经常产生超速紧急制动的问题。通过优化车辆制动系统电空混合控制的逻辑条件,并修改车辆制动系统软件,重庆地铁6号线车辆法维莱制动系统的该项问题得到了有效解决。3 故障分析
4 解决方案
5 结束语
猜你喜欢
今日农业(2021年13期)2021-11-26军事文摘(2021年18期)2021-11-25小哥白尼(趣味科学)(2021年4期)2021-07-28云南画报(2021年4期)2021-07-22数学小灵通·3-4年级(2020年11期)2020-12-14小学生学习指导(低年级)(2019年6期)2019-07-22学苑创造·A版(2018年12期)2018-03-04中国新闻周刊(2017年21期)2017-06-15阅读(中年级)(2016年8期)2016-05-14中国火炬(2014年11期)2014-07-25
