
一种三自由度海工装备用栈桥的结构设计与运动学分析
2022-05-31 05:20:14宋志国王通通
工程与试验 2022年1期
宋志国,王通通
(1.南通中远海运船务工程有限公司,江苏 南通 226006;2.南通大学机械工程学院,江苏 南通 226019)
1 引 言
近年来,国内外在海洋资源上的投入不断上升,尤其是风电能源产业。据中国船舶报报道,2020年全球海洋风电能源产业支出高达510亿美元[1]。我国海岸线总长约3.2万公里,为我国发展近海风电能源产业提供了强大的地理支撑。2021年7月28日,央视新闻网报道,我国海上风电能源新增并网容量215万千瓦,同比增长102%。种种数据表明,海上风电能源产业是未来发展的趋势,是各国追捧的新能源宠儿。然而,由于海上环境恶劣,受高盐雾、高湿、长日照影响,海上风电电气设备的故障率远高于陆上风电电气设备故障率[2,3]。相关研究表明,陆上风电电气设备故障率已高达40%~50%,海上风电电气设备故障率要远高于此值[3]。因此,研发可供工作人员来往于运维船与生产平台之间的安全通道以进行运维工作,是当下生产发展的迫切需要。
目前,国外如AMPELMANN、SMST等已有较为成熟的产品,国内在此领域仍处于起步阶段。国内很多科研人员进行了海上平台用栈桥的研发、制造,笔者所在单位也联合多家单位一起设计了一款三自由度海工装备用栈桥结构,借助Matlab仿真验证,提供了一种海工装备用栈桥的可行性方案。
2 海工装备用栈桥结构建模
海工装备用栈桥的总体设计如图1所示,在船体受到风浪流的影响产生摇摆偏移时,为使安装在船上的海工装备用栈桥依然可以通过补偿动作实现与生产平台之间的稳定搭接,需要补偿的运动主要有船体的浮沉、偏移、旋转和摇摆,这些动作可由海工装备用栈桥的回转机构、俯仰机构和伸缩机构联合运动完成。该海工装备用栈桥应用于平台供应船(PSV)上,其最大伸长量为28m,运维船与待搭接平台的距离应控制在此范围之内。

1.回转机构 2.俯仰机构 3.伸缩机构图1 海工装备用栈桥结构总体图
回转机构由液压马达作为驱动装置,工作范围为-90°~90°,图2为其仰视图。
俯仰机构以两个液压缸作为驱动,推动主桥上下俯仰运动以完成波浪引起的船体浮沉补偿,工作范围在-20°~20°,如图3所示。

1.两个同步液压缸 2.基座图3 俯仰机构
伸缩桥补偿范围为-3m~3m,与主桥之间通过齿轮齿条连接,完成海工装备用栈桥的伸缩运动,如图4所示。

1.液压马达驱动齿轮 2.焊接在伸缩桥上的齿条3.主桥体结构 4.伸缩桥体结构图4 伸缩机构
此海工装备用栈桥结构简单,生产装配较为方便,工作水域适应性强。其回转装置安装在基座上,基座安装在运维船的升降梯上。进行运行维护工作时,工作人员可根据工作水域水位的高低,如海水的潮汐现象,通过升降电梯对海工装备用栈桥进行位置高低的基础调节。在运维船到达指定位置后,3种动作相互配合,完成海工装备用栈桥与生产平台的搭接。搭接完成后,工作人员即可通过海工装备用栈桥来往于运维船与生产平台进行运维工作。在海工装备用栈桥与生产平台连接过程中,海工装备用栈桥的3个运动机构均处于活动状态,在压力油的作用下,不断补偿因风浪流引起的海工装备用栈桥末端相对于搭接点的偏移。
3 海工装备用栈桥的运动学分析
3.1 海工装备用栈桥连杆坐标系的建立
海工装备用栈桥末端不设置固定连接,可认为是一机械臂,末端位姿由海工装备用栈桥的两个转动关节和一个移动关节参数决定。各关节均为一自由度,海工装备用栈桥共3个自由度。采用标准D-H参数法建立模型[4],该方法由Denavit和Hartenberg在1955年提出,广泛用于各种机械臂建模[5]。该方法的特点是各坐标系对应各连杆的末端位姿(如图5所示),由连杆坐标系得机构D-H参数,如表1所示。其中,θi表示当前坐标轴xi相对于前一坐标轴xi-1绕zi-1的转角,di表示连杆偏移量,ai表示相邻坐标系z轴的偏移距离,αi表示当前关节相对于前一关节间的扭角。
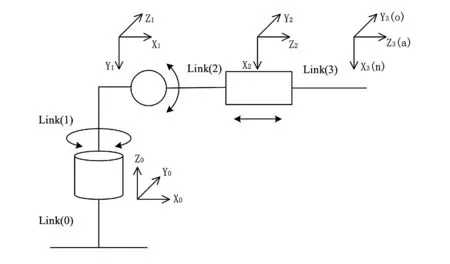
图5 海工装备用栈桥连杆坐标系

表1 海工装备用栈桥D-H参数
根据该海工装备用栈桥实际工作要求,θ1的取值范围为-90°~90°,θ2的取值范围为70°~110°,d1的取值范围为25m~28m。根据标准D-H参数法建立的海工装备用栈桥D-H参数表可以看到,连杆2坐标系相对于连杆1坐标系的两个距离参数均为0,即坐标系1和坐标系2的原点重合,连杆2的长度为0,不符合实际情况。为保证海工装备用栈桥建模长度与实际长度相同,此处d1表示的距离为海工装备用栈桥末端到连杆2从动关节的距离。
3.2 海工装备用栈桥连杆运动学分析
完成海工装备用栈桥连杆坐标系的建立后,当基座关节至海工装备用栈桥末端各关节参数给定时,通过连杆间的坐标变换以表达出海工装备用栈桥末端位置相对于基坐标系的位姿,即为海工装备用栈桥连杆运动学的正解。
连杆i与i-1之间的齐次坐标变换矩阵i-1Ti为[4]:
将表1中的海工装备用栈桥D-H参数代入上式,可得相邻杆件间的齐次变换矩阵:
其中,si、ci分别表示sinθi和cosθi,下文中表示含义与此相同。
海工装备用栈桥末端位置相对于基坐标系的变换矩阵0T3为:


为校核所得坐标变换矩阵的正确性,取θ1=0,θ2=90°,d1=25m海工装备用栈桥初始姿态代入上式验证。结果为:
其表达的含义为初始坐标绕基坐标系Y0轴逆时针旋转90°,沿基坐标系X0轴正方向移动25.35m,沿基坐标系Z0轴正方向移动2.35m得海工装备用栈桥末端位姿。与图5海工装备用栈桥初始位姿一致。
4 Matlab仿真分析
4.1 运动学模型验证
为验证所建海工装备用栈桥结构模型的合理性,借助Matlab中的Robotics Toolbox进行建模仿真验证。根据前文标准D-H参数法建立坐标系,在Matlab中建立连杆模型,部分代码如下:
1(1)=Link(’d’,2.35,’a’,0.35,’alpha’,-pi/2);
1(2)=Link(’d’,0,’a’,0,’alpha’,-pi/2);
1(3)=Link(’theta’,0,’a’,0,’alpha’,0);
1(1).qlim=[-pi/2,pi/2];
1(2).qlim=[7*pi/18,11*pi/18];
1(3).qlim=[25,28];
Theta1=0;theta2=pi/2;d1=25;
Rob=Seria1Link(1);
为使建立的模型具有可观的运动姿态,利用teach()函数建立连杆示教界面,运行结果如图6所示。图中,q1、q2和q3按钮分别用于调节海工装备用栈桥的回转角度、俯仰角度和伸缩长度,点动q1、q2和q3按钮即可观察海工装备用栈桥的运动位姿。调节按钮q1、q2和q3的调节值分别为0,90和25,即对应上文验证变换矩阵正确性时的取值θ1=0°,θ2=90°和d1=25mm,可得到图6中海工装备用栈桥所示位姿,与上文计算结果一致,这说明了两次建模的正确性。
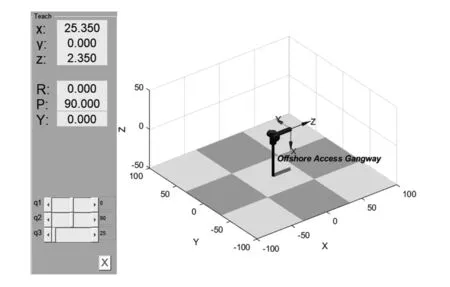
图6 海工装备用栈桥连杆模型与示教界面
4.2 运动学仿真
在机械结构设计时,需要尽量避免结构的刚性、柔性冲击,使之能够平稳运行,各构件之间无碰撞[7]。为此,利用上文中建立的模型得到的极限位置参数,结合五次多项式运动规律进行运动轨迹规划,得到海工装备用栈桥连杆模型各关节的运动参数曲线,如图7、图8、图9所示。从生成的运动参数曲线可以看出,各关节曲线过渡平滑、无突变点,这说明海工装备用栈桥各连接关节可以无刚性、柔性冲击相对运动,符合结构设计原理。

图7 海工装备用栈桥连杆关节位移-时间曲线

图8 海工装备用栈桥连杆关节速度-时间曲线

图9 海工装备用栈桥连杆关节加速度-时间曲线
4.3 工作空间分析
工作空间是指海工装备用栈桥各关节在移动范围内变化时,海工装备用栈桥末端所能达到的所有停靠点的集合。根据设计目标,该海工装备用栈桥需要在三级海况下满足工作要求,即需要保证海工装备用栈桥在该海况下总能保持末端与生产平台的搭接,故需要对其工作空间进行仿真分析。
蒙特卡洛法是计算机械臂工作空间最常用的方法之一[6],其原理是连杆的各个关节在给定区间内随机运动,借助计算机快速求解的特性,根据关节范围内的任意运动取值,求解出每种组合数据下海工装备用栈桥末端的位姿,最后提取每一种组合下生成的海工装备用栈桥末端位置点的坐标,即:Pi(Px,Py,Pz)。其中,i=1,2,…,n,n为取随机数的数量。
在取随机点的数量足够多时,通过Matlab中散点绘制函数scatter3(),在三维坐标中绘制出求解出的所有坐标点的集合,即可得到海工装备用栈桥工作空间的点云图。取随机点的数量越多,仿真结果越接近海工装备用栈桥的实际工作空间形状,但同时也会增加程序运行时间。本仿真中取100000点进行仿真模拟,已能较为明确地观察出实际工作空间范围。程序运行时间约为124s,主要花费在fkine()函数运动学求解每种关节参数组合下海工装备用栈桥末端的位姿上,运行结果如图10所示。

(a)海工装备用栈桥工作空间三维图 (b)XOY工作空间视图
由图10(a)和图10(b)可以看出,此三自由度海工装备用栈桥的工作空间近似为具有一定厚度的半圆环。在船体受到风、浪、流的影响发生偏转移动时,海工装备用栈桥即可通过自身的回转机构、俯仰机构和伸缩机构协同作用,使得末端位置在此半圆环内相对于连在船体上的基座运动,实现与生产平台相对静止的稳定搭接。
由图10(c)和图10(d)可以看出,此海工装备用栈桥的浮沉补偿范围约为-7m~12m,满足三级海况(最大波高<3m)下船体浮沉带来的海工装备用栈桥浮沉补偿的要求。
5 结束语
考虑到日益增加的海上运维工作需要,本文设计了一款三自由度海工装备用栈桥结构,采用D-H参数法建立模型,并进行运动学分析,使用五次多项式运动规律分析了该结构运行时的平稳性,最后结合蒙特卡洛法进行仿真验证,证明该海工装备用栈桥结构可以满足工作需要,为海工装备用栈桥结构的发展提供了一种可行方案。该海工装备用栈桥具有在低自由度下维持末端与搭接平台稳定相连的优点,降低了开发液压系统和控制系统的复杂程度。该三自由度海工装备用栈桥的推广,对于打破欧美技术垄断具有积极的作用。从欧美进口的海工装备用栈桥每台在2000万元以上,国产化后预计每台可将价格降低50%以上。未来海工装备用栈桥系统国产化率会逐渐升高,有利于降低国内海工装备建造成本,有效地推进海工装备国产化率的进展。本文开发的三自由度海工装备用栈桥可应用于海上生活平台、储卸油平台、钻井平台等海工装备中。
猜你喜欢
山东冶金(2022年2期)2022-08-08 01:51:12
辽宁师专学报(自然科学版)(2021年1期)2021-07-21 03:17:06
装备制造技术(2020年1期)2020-12-25 05:19:14
飞天(2020年9期)2020-09-06 14:04:35
电镀与环保(2017年6期)2018-01-30 08:33:31
光学精密工程(2016年5期)2016-11-07 09:05:55
光学精密工程(2016年4期)2016-11-07 09:05:11
湖北工业大学学报(2016年5期)2016-02-27 13:14:48
西藏科技(2015年3期)2015-09-26 12:11:11
中国工程咨询(2015年3期)2015-02-14 03:28:28
