
一种基于RBF神经网络的卷接机振动状态监测系统
2022-05-30 20:41:07王婉张宝伟汪星星
电子产品世界 2022年9期
关键词:RBF神经网络
王婉 张宝伟 汪星星
摘 要:本文首先介绍了基于径向基函数(radial basis function, RBF)神经网络的卷接机振动状态监测系统的总体方案设计;然后对硬件设计方案进行了说明;接着详细描述了系统的软件设计部分,包括数据交互处理、时域特征识别、FFT分析过程和特征提取等模块。最后,对卷接机振动状态监测系统的研制成果进行总结。
关键词:RBF神经网络;振动监测;卷接机
1 引言
卷接机是卷烟生产过程中的一个重要设备,其功能是将烟丝卷制成烟支。随着卷接设备的高速发展,卷接设备的结构日趋复杂、精密,为了实现高效生产,提高卷烟速度,仅凭技术和经验,效果毕竟有限,难以推动生产效率真正跃上新台阶。主要原因在于,机械损耗和意外故障等难以预料的因素导致卷接机无法正常运转而引起的紧急关停,严重影响了卷接机的运转率。为了进一步减少卷接机故障停机时间,提高设备有效作业率,本文提出了一种基于RBF神经网络的卷接机振动状态监测系统。
在故障设备诊断中,故障特征与故障模式并不是简单的一一对应关系,其构成的特征空间比较复杂,常常线性不可分。而RBF神经网络能够映射这种任意复杂的非线性关系,本文提取振动信号的时、频域特征,输入RBF神经网络进行特征识别和分类,进而对振动状态进行监测。
2 系统总体方案设计
卷接机振动状态监测系统总体方案如图1所示,包括传感采集模块、振动信号监测模块、人机交互模块。
传感采集模块选用频率响应范围10 kHz的振动传感器以满足系统对振动频率的要求,考虑到卷接机组空间范围的限制,振动传感器采用磁吸方式吸附。
振动信号监测模块选用倍福C6000系列处理器作为控制单元,采用多任务并行处理方式,首先对振动信号进行滑动平均滤波;然后测量振动信号的时域特征RMS,和频率特征FFT;最后提取特征向量,输入RBF神经网络,完成振动故障预判。
人机交互模块,采用C#编程语言,完成角色管理、权限分配、日志管理、数据存储、故障报警和参数设置等功能。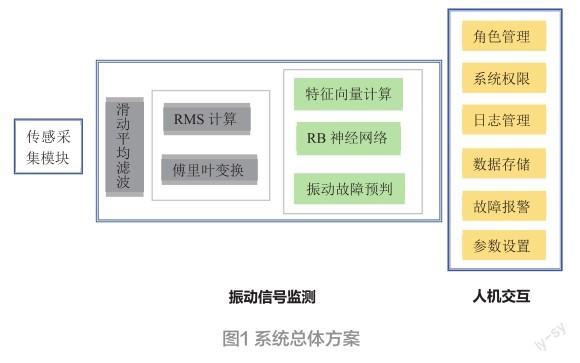
3 硬件设计
采用工业式PC模块,超采样模拟量输入端子模块,带IEPE接口的加速度传感器模块和工控机组成。超采样模拟量输入端子模块首先完成配置滤波器和供电电流的调整,然后以10倍的采样倍数完成振动数据的采集。采集的振动数据输入工业式PC模块。工业式PC模块对采集的振动数据进行滤波,并完成振动特征数据的计算与存储。然后通过ADS通信协议与工控机进行数据通信。工控机完成RBF神经网络的训练和数据的测试,实现故障诊断和界面显示功能。振动状态监测的硬件连接图如图2所示。
4 软件设计
4.1 数据交互
本系统的数据处理主要分布在工业式PC和工控机两端,具体过程如图3所示。需经过以下步骤。
1.工业式PC端
(1)滤波器和供电电流配置;
(2)参数初始化;
(3)以10 KHz速率完成振动信号采样;
(4)数据滤波;
(5)填充输入缓冲区;
(6)进行FFT变换和RMS值计算;
(7)数据输出与存储。
2.工控机端
(1)从cvs文件读取保存的频谱值,频谱值分为7个频段;
(2)初始化神经网络内存;
(3)申请样点误差内存;
(4)初始化网络参数;
(5)计算个体误差和总体误差;
(6)如果未达到训练次数且样点误差小于阈值,循环计算网络输出和样点输出的误差,直到条件不成立,输出中心向量、基宽、输出权重;
(7)数据测试、输出结果。
4.2 时域特征识别
机械振动的瞬时值随着时间而不断地变化,作为表示这种振动变化大小的方法,广泛地使用有效值。利用时域参数RMS值(有效值)进行简易诊断,即判断电机是否有故障。振动信号的时域特征有效值(RMS)是振动振幅的均方根值,定义如下:
电机正常时RMS波形如图4所示,RMS值约为105;电机故障时RMS波形如图5所示,RMS值约为237,RMS值有明显变化。
4.3 FFT分析过程
图6为50%重叠的FFT分析过程,长度为1600的缓冲区由数据流进行填充。前一个缓冲区包含在缓冲区n的数据评估中,所以现在窗口中的数据包包含3200个值。窗函数的最大值正好在两个缓冲区的中间,在两个缓冲区的边缘处趋于为零。零填充將数据包扩展到4096个值,长度为2的幂,因此可以用FFT算法有效的计算。FFT的结果是一个有4096个值的数据包,如果数据是实数,FFT结果可以减少到2049个值。在计算缓冲区n时,填充缓冲区n+1,并将缓冲区n包含在其计算中。这种方法总是导致窗口时间范围有50%的重叠。

电机的振动频率成分十分丰富,每一种特定的故障都对应特定的频率成分。电机正常运行时FFT波形如图7所示,波峰处于550 Hz,幅度为0.95。电机故障时波形如图8所示,此时波峰处于180 Hz,幅度为2.0。无故障情况下,峰值很小,说明运转平稳,当电机出现故障时,会出现冲击,波峰会明显加大,甚至是成倍增加。频谱分析法可确定电机振动信号的频率构成,振动能量在各频率成分上的分布。
4.4 特征提取
振动特征数据与故障模式并非简单的线性关系,所构成的故障特征空间比较复杂,而RBF神经网络能够转换这种复杂的非线性映射,具有最佳逼近性能和全局最有解。所以采用RBF神经网络代替人工对振动故障特性进行诊断是实际可行的。
在RBF神经网络信息传递过程中,第一层为输入层,输入层节点主要负责接收来自外界的数据信息,将输入数据传递到隐含层;第二层为隐含层,隐含层激活函数通常选取高斯函数,主要是对输入数据进行变换,将低维的模式输入变换到高维空间内;第三层为输出层,输出层是对隐含层采用线性加权求和得到网络输出,这样使得网络的收敛速度很快。
假设RBF神经网络的结构大小为:M-H-1,其各层输入输出关系描述如下。
(1)输入层
(2)隐含层
隐含层是对输入信息进行变换,传递函数常选用标准的高斯函数,在t时刻,隐含层第h个神经元的输出表示式如下所示:
(3)输出层
卷接机组的振动信号在频域内的能量分布具有比较明显的特点,因此,选取7段谱特征作为模型的输入向量。具体将(0.01~0.35)f,(0.36~0.45)f,(0.46~0.99)f, (1.01~1.5)f,(1.5~2)f,(3~5)f,等7个频段的频谱和作为特征频率,根据公式(2)计算各个频段的频谱和,其中W为频谱和,为频率范围。
在RBF神经网络工作以前,需要确定一定数量的训练样本对RBF神经网络进行训练,训练好的RBF神经网络的数据中心、方差、连接权保持固定。这样输入测试样本就可以获得结果,当测试样本的特征与RBF神经网络中对应的某个特征相近时,神经网络输出该类故障。本文同时结合振动信号的RMS值和7段谱特征作为构造特征向量,在故障特征向量空间内进行分类,然后以这些特征向量为学习样本,输入RBF神经网络训练,得出中心向量、基宽、输出权重,完成结果值预测。
5 结语
本文提出一种基于RBF神经网络的卷接机振动状态监测系统,基于倍福的多任务并行处理器C6000,对经过滑动平均滤波处理后的振动信号,有效提取时域特征RMS值和FFT频域的7段谱特征,以此构造rbf神经网络的特征向量,进行特征向量空间的分类,完成故障状态的预测。
参考文献:
[1] 安茹.基于动态RBF神经网络的出水氨氮軟测量研究[D].北京:北京工业大学,2017.
[2] 陈松.RBF神经网络在旋转机械故障诊断中的应用[D].合肥:安徽建筑大学,2014.
[3] 王建国,孙小明,王少锋,等.基于LabVIEW的风电机组齿轮箱健康状态监测系统设计[D].包头:内蒙古科技大学,2016.
[4] 汪庆华,王敬涛,邓东花.基于径向基神经网络的旋转机械故障诊断[D].西安:西安工业大学,2010.
[5] 高帆,李洪元,吴帆.基于频谱分析的离心泵健康状态监测及故障诊断[R].重庆:重庆川仪软件有限公司,2019.
猜你喜欢
计算机时代(2017年2期)2017-03-06 20:22:47
商情(2016年46期)2017-03-06 04:08:38
科教导刊·电子版(2016年26期)2016-11-21 09:50:44
科教导刊·电子版(2016年27期)2016-11-18 09:48:25
科教导刊·电子版(2016年25期)2016-11-16 22:09:46
电脑知识与技术(2016年25期)2016-11-16 14:27:21
科技视界(2016年18期)2016-11-03 23:59:24
电脑知识与技术(2016年7期)2016-05-19 11:13:37
企业导报(2016年6期)2016-04-21 15:48:21
现代电子技术(2015年21期)2015-11-09 21:51:32
