
用液压传动技术实现钻孔机立柱垂直度调整的方法研究
2022-05-30 07:44陈忠润李明相
电子测试 2022年8期
陈忠润,李明相
(云南能源职业技术学院,云南曲靖,655000)
1 比例脉冲控制器
多功能钻孔机在工作运行过程中必须时刻调整立柱垂直度,确保立柱垂直度调整机构建设到位,它关乎钻孔机的成孔质量,主要体现在成孔锥尺度以及承装承载能力等多项指标上,满足钻孔机立柱垂直度调整要求。换言之,要利用液压传动技术来模拟比例脉冲控制技术,如此可实现对钻孔机立柱的垂直度有效调整,分别利用手动与自动两种调节方式最大程度保证成孔垂直度。
液压传动技术系统中的比例脉冲控制器控制技术概述
1.1 比例脉冲控制器的基本构成
比例脉冲控制器的基本构成部分包括了误差放大器、锯齿波发生器、电压比较器以及驱动电路,它们共同组合负责对钻孔机立柱成孔垂直度进行调整,明确调整工作原理,如图1。
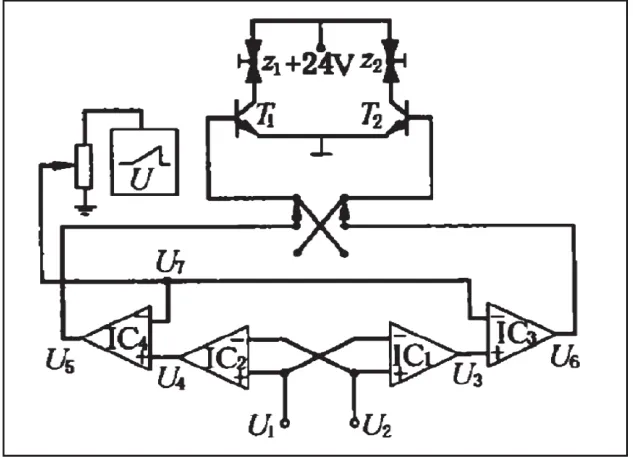
图1 钻孔机立柱成孔垂直度调整控制器工作原理
1.2 比例脉冲控制器的比例脉冲控制原理
在比例脉冲控制器中存在误差放大器,其价值作用是对传感器所送来的电压与设定角度电压差值进行分析,同时判断电磁阀工作极性。具体分析,误差放大器中包括了IC1以及IC2两部分,另外附带有周边元件。结合图1内容可以进一步了解到传感器是配合电压U2加入到IC1以及IC2±端的,如果架设交角度电压始终保持不变,所以需要始终保持U1=U2,U1>U2或者U1<U2 3种状况,分析电路输出情况。如果U1=U2,所以IC1以及IC2中的±输入端电压是完全相等的,所以U1=U2、U3=U4。
如果U1>U2,则IC1+端电压<IC2+端,电压整体>-端,这其中电压高低的计算公式应该参考如下:U1-U2=△U,且U1与U2成正比关系。
如果U1<U2,则IC1+端>-端,IC2+端<-端,所以有U1=0、U2>0,则电压高低中U2-U1=△U成正比关系。
结合上述分析可以了解到,在分析U2电压变化过程中,需要了解到IC1以及IC2中总有一个在输出、另一个则是未输出状态,如此就能起到极性判别作用。但如果U2变小,则IC2会输出电压;如果U2变大,则IC1会输出电压。这里还需要进一步分析电压比较器组成,电压比较器在分析误差放大器过程中必须计算分析误差情况,以及脉冲过程中有效驱动电路控制情况,做到对电磁阀的合理开闭。结合这一点分析当误差电压不断升高时,电压比较器的输出脉冲数量也会越来越多、脉冲宽度越来越宽,对电磁阀表现进行分析,传感器的倾斜度也会越来越大,此时要分析电磁阀开通次数,当电磁阀开通次数逐渐增多时,电磁阀开通时间就会越来越长。在电压比较器工作过程而言,需要对其传感器比例调节过程建立分析机制,如此可进一步分析IC1、IC2中±端误差放大器两大输出端,分析多种假定状况下的电压比较器输出状况,所以如果U1=U2=0,它的+端电压应该为0,两电压比较器输出也应该为0。如果IC1、IC2中+端电压高于-端电压,需要对运算放大器的工作开环状态与增益逐渐增大情况进行分析,了解IC1、IC2的饱和状态,思考其输出电压是否接近电源电压情况。就这一点必须分析锯齿波电压,在电压不断升高过程中,需要分析±两端所存在的电压差值减小情况,最后分析输出电压可能会跳回零电位。
2 液压传动技术系统中的钻孔机立柱偏斜受力情况分析
2.1 液压传动技术系统中的钻孔机立柱偏斜受力过程
在液压传动技术系统中,需要对钻孔机立柱成孔过程中的偏斜受力情况进行分析,实际上它为液压缸受力,所以需要通过万向球铰与钻孔机的连接情况建立液压缸支承机构。具体来讲,由于液压机属于二力杆件,所以需要分析液压缸系统中的立柱受力状况,保证立柱偏斜分解到位。实际上所谓钻孔机立柱偏斜即平面内的倾斜。
假设在液压传动技术系统中设置有两个液压缸,其对立柱作用力所产生的指向点为至少两点,其中受力可设置为F1和F2,需要分析其轴力矩平衡方程进行分析:建立力矩平衡方程机制,具体如下:

在上述力矩平衡方程机制中,其中l1、l、α标识不同力矩距离,如果立柱偏斜过程中需要分析受力情况,对实际钻孔机建立公式如下:

在实际钻孔机上,立柱偏斜一般偏小,所以α值也相对偏小,此时k≈0,则立柱在平面内不倾斜处于垂直状态时,应该符合α=β、θ=γ,即两个液压缸对立柱作用力产生影响,且作用力相等。如果立柱在平面内倾斜,则两个液压缸对立柱作用力大小相等,此时需要分析作用力大小发生变化,但立柱偏斜明显较小,但其变化比较显著。如果α、β变化则相对不明显,此时需要分析立柱的实际偏斜状况,其立柱支撑缸的立柱作用力逐渐减小,所以有F1作用力减小,F2作用力增大。
2.2 液压传动技术系统中的钻孔机立柱偏斜受力结论
结合上述液压传动技术系统,需要分析钻孔机立柱偏斜受力情况,得出结论。首先,立柱偏斜可理解为发生了平面内倾斜情况;其次,在立柱前后倾斜过程中,存在两个支撑缸内压力相同情况;第三,在立柱左右倾斜过程中,需要分析立柱倾斜方向,对支撑缸杆腔内压力增加问题进行分析总结。
3 液压传动技术系统中的钻孔机双液控方向阀结构与工作原理分析
3.1 双液控方向阀结构的分析
在分析双液控方向阀结构过程中,需要对其结构与液动式方向阀问题进行分析,了解阀芯两侧不使用弹簧的限位技术机制,采用弹簧限位技术,对阀门处于中位控制过程对一侧弹簧力增大、另一侧弹簧力减小情况进行比较,即液压力比较,如此的阀芯相对于阀体是处于滑动状态的,调节流量控制液压缸运行速度,保证输出回油速度,保证这一速度与节流口速度相同即可。在方向阀结构分析过程中配合两个液压缸,建立并联结构,结合方向阀阀芯位置变化来分析液压缸的单独供油状况。最后分析阀芯中位过程中,必须对液压缸的有杆腔与无杆腔部分进行联动分析,确保液压缸有效供油。
3.2 液压传动技术系统的工作原理分析
在液压传动技术系统中,需要采用液压系统手动工作方式与液压系统自动控制方式两种方式。就以液压系统自动控制方式为例,它专门以两位两通方向阀进行系统操作,保证系统正常进入到自动调节状态中,并设置方向阀的手动与自动两大选择按钮,要合理利用液压系统自动控制方法,确保三位四通方向阀手动控制到位,正确选择工作位,同时对弹簧力左右两侧液压力比较结果进行分析与选择。如果立柱在平面内出现前后方向倾斜,就必须对两液压缸有感腔内油压减小问题进行分析,确保弹簧力立柱垂直压力计算到位。如果液压缸杆腔内小于弹簧力立柱垂直压力,则需要利用三位四通方向阀工作位进行分析,保证双液控方向阀中位设置到位,它主要考察液压泵的等量液压缸杆腔供油情况,推动压力会所状况,确保立柱垂直度有效调整,建立二位二通方向阀有效换位,将液压缸工作状态完全锁定。
如果采用液压系统手动工作方式,则需要建立三位四通方向阀,配合手动手柄,随时调整工作状态,配合回油箱与液压缸建立闭锁运行状态。在液压泵排除油液流入双液控方向阀时,就必须对左右两个油缸进行外伸处理。在此时,双液控方向阀工作在左位,其左侧液压缸中应该采用无杆腔供油,如此才会向外伸出。结合上述液压系统手动工作调节方式,可确保钻孔机立柱不发生偏斜,全过程在受力状况下始终保持垂直状态,如果出现偏斜则会及时做好调整。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
广东造船(2022年3期)2022-07-09
科技创新与应用(2022年14期)2022-06-02
矿山机械(2022年5期)2022-05-19
矿山机械(2022年2期)2022-03-02
智能制造(2021年4期)2021-11-04
建筑与装饰(2020年17期)2020-10-20
记者观察(2019年1期)2019-04-04
中国建筑金属结构(2018年12期)2018-12-22
智富时代(2018年6期)2018-08-06
