
一种适用于山地齿轨的测速测距系统研究
2022-05-27 06:21孙晓光周延昕
铁路通信信号工程技术 2022年5期
刘 霞,孙晓光,周延昕
(通号城市轨道交通技术有限公司,北京 100070)
国内轨道交通线路的发展,主要服务于旅游景区内及景区之间的山地齿轨交通凭借爬坡能力强等特点正在逐步走入建设运营方的视野。各地正在积极推进山地齿轨交通的落地,开展相关示范应用。本文提出了一种适用于山地齿轨的测速测距方案,通过仿真环境对测速测距系统开展仿真测试。
1 概述
山地齿轨轨道交通主要服务于旅游景区内部、景区之间以及沿线主要城镇的低运量客流运输,尤其适用于地形起伏大的山地线路,其爬坡能力可达350‰。国外山地齿轨已开展较为普遍的应用,包括1869年建成的美国华盛顿山齿轨铁路、1889年建成的瑞士皮拉图斯齿轨铁路、1896年建成的英国斯诺登山齿轨铁路、1974年建成的法国里昂地铁C线、1988年建成的澳大利亚科修斯克国家公园齿轨铁路、1990年建成的日本井川线铁路等[1-2]。齿轮齿轨系统是山地齿轨交通的重要组成部分,主要有Marsh、Locher、Ruggenbach、Strub、Abt、Margan等形式[3-8]。
与传统信号系统相比,山地齿轨交通具有车轮测速和齿轮测速切换、运营坡度大等特点,对列车控制系统车载设备测速测距系统适应性要求高。为适应山地齿轨交通系统,本文通过安装在车轮、齿轮的速度传感器进行基础测速测距,利用多普勒雷达、三向加速度传感器进行空转打滑及速度传感器切换区域补偿,并在室内进行仿真验证。
2 测速测距系统设计
山地齿轨交通测速测距设备需要考虑钢轨驱动、齿轨驱动切换的特殊点。在钢轨驱动、齿轨驱动的切换区域可能存在空转打滑情况,在应用到列车控制系统车载设备时,需解决测速测距精度、冗余性等问题。
2.1 系统结构设计
测速测距系统通过速度传感器、多普勒雷达和三向加速度传感器计算测速测距信息,测速测距系统结构如图1所示。在双端车轮及齿轮上各加装1个速度传感器、1个多普勒雷达,双端各加装2个三向加速度传感器。速度传感器采用3路脉冲信号与车载设备通信,多普勒雷达采用RS-485接口与车载设备通信,加速度传感器采用RS-422接口与车载设备通信。车辆两端的车载设备通过TRDP网络进行连接,交互测速测距信息。
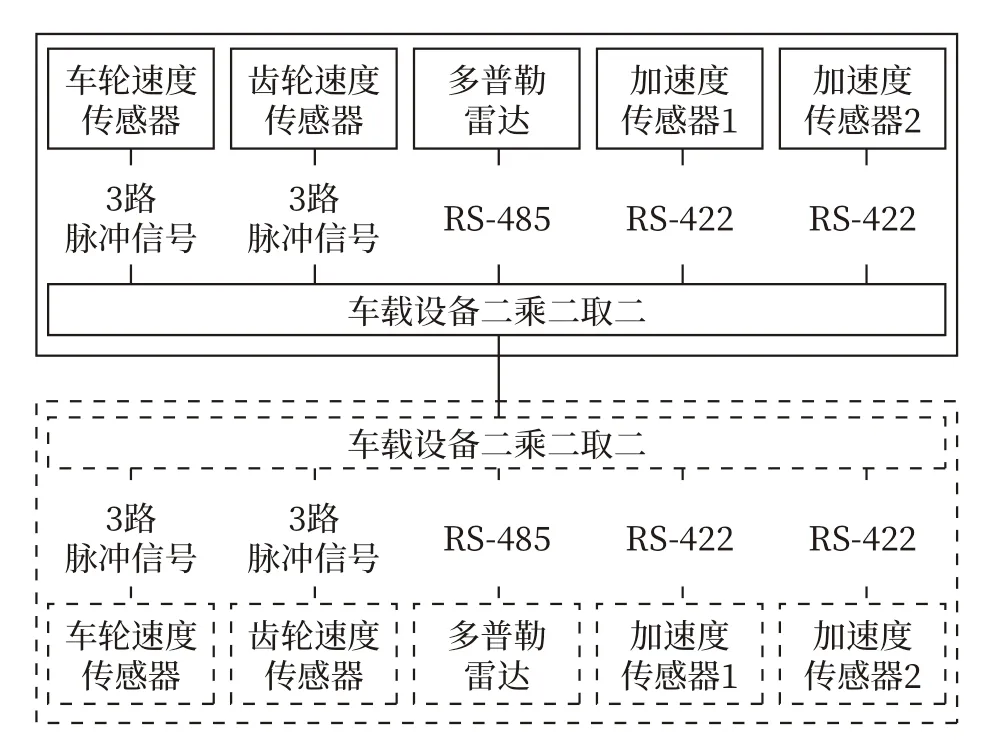
图1 测速测距系统结构Fig.1 Speed and distance measurement system structure
2.2 测速测距算法设计
测速测距系统在钢轨驱动区段采用安装在车轮的速度传感器进行速度计算,采用多普勒雷达进行空转打滑补偿。
测速测距系统在齿轨驱动区段采用安装在齿轮的速度传感器进行速度计算,采用三向加速度传感器进行速度平滑及距离补偿。
测速测距系统在钢轨驱动、齿轨驱动过渡区域,采信尾端的测速测距系统计算结果,通过三向加速度传感器进行速度平滑及距离补偿。
因钢轨驱动、齿轨驱动的过渡区域长度较短,一般小于一个列车长度,通过工程设计保证列车两端不同时在过渡区域,所以列车两端均在过渡区域的测速测距可不考虑。
测速测距算法的主要流程如图2所示。

图2 测速测距主要流程Fig.2 Speed and distance measurement system flow chart
3 仿真测试
在室内搭建测试环境,通过脉冲信号、RS-485、RS-422接口模拟速度传感器、多普勒雷达、三向加速度传感器向车载设备发送信息,测试验证测速测距系统的可用性。
3.1 仿真测试环境
仿真测试环境主要包含仿真运行单元、故障注入模拟单元、传感器模拟单元、测速测距结果分析单元4个部分,如图3所示。

图3 仿真测试环境结构Fig.3 Simulation test environment structure
3.2 仿真测试结果
通过仿真系统测试该测速测距系统在山地齿轨交通中钢轨驱动区域、钢轨向齿轨驱动切换区域、齿轨驱动区域、齿轨向钢轨驱动切换区域的测速测距效果,验证其可行性。如图4所示,标号1为钢轨驱动阶段,车轮速度传感器空转打滑,雷达测速正常,测速测距系统采用雷达进行速度补偿。标号2为车轮驱动向齿轨驱动切换阶段,首端进入钢轨驱动向齿轨驱动过渡阶段,采信尾端的测速测距信息;首端越过过渡区段时,采用本端测速测距信息;在首尾端测速测距信息切换时采用三向加速度传感器信息进行平滑处理。标号3为齿轨驱动向车轮驱动切换阶段,首端进入齿轨驱动向钢轨驱动过渡阶段,采信尾端的测速测距信息;首端越过过渡区段时,采用本端测速测距信息;在首尾端测速测距信息切换时,采用三向加速度传感器信息进行平滑处理。
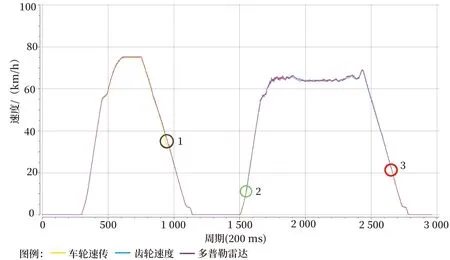
图4 仿真测试结果Fig.4 Simulation test result
4 结论与展望
山地齿轨交通凭借其爬坡能力强等特点,成为景区内及景区间交通领域的热点发展方向。本文描述一种适用于山地齿轨交通的测速测距系统,并通过室内仿真测试验证其可用性,后续将在现场实际线路中开展示范应用进一步验证。
猜你喜欢
——从我国第一代地铁车DK1到山地城市地铁车As
城市轨道交通研究(2022年2期)2022-11-19
导航定位学报(2022年4期)2022-08-15
建材发展导向(2021年7期)2021-07-16
科学家(2021年24期)2021-04-25
中国房地产业·下旬(2019年7期)2019-09-27
电子制作(2019年24期)2019-02-23
电子制作(2019年24期)2019-02-23
电子制作(2019年23期)2019-02-23
小学阅读指南·高年级版(2016年1期)2016-09-10
科技致富向导(2013年8期)2013-05-30
