
轻型载货汽车功率分流式混合动力构型研究
2022-05-27 14:54沈振方马洪彦雷永超吴朝
汽车科技 2022年3期
关键词:仿真分析
沈振方 马洪彦 雷永超 吴朝










沈振方
毕业于武汉理工大学,工程硕士学位,现就职于东风股份有限公司,商品研发院新能源平台科,任助理工程师,主要从事新能源整车控制策略开发及性能仿真工作。
摘 要:轻型载货汽车多应用于城市物流,混动化方案需要充分考虑其日均工作里程长,在市区和城郊行驶占比大的特点。本文立足于轻型载货汽车,对功率分流式混合动力进行研究,分析了其构型特点和工作模式,应用AVL_Cruise建立了整车及动力模型,并在Matlab/Simulink中搭建了整车控制策略,根据现行标准要求,计算了整车动力性和经济性。结果表明,功率分流式混动车型与燃油车相比,动力性和经济性显著提升,功率分流式构型在轻型载货汽车上有一定的应用优势。
关键词:轻型载货汽车;功率分流;单行星排;仿真分析
中图分类号:U462.2 文献标识码:A 文章编号:1005-2550(2022)03-0014-07
Research on Power-Split HEV Configuration of Light Truck
SHEN Zhen-fang, MA Hong-yan, LEI Yong-chao, WU Zhao
(Commercial Product R&D Institute, Dongfeng Automobile Co., Ltd, Wuhan 430057, China)
Abstract: Light-duty trucks are mostly used in urban logistics, and the hybridization scheme needs to fully consider the characteristics of long average daily working mileage and a large proportion of driving in urban and suburban areas. Based on light-duty trucks, this paper conducts research on power-split HEV and analyzes its configuration characteristics and working modes. AVL_Cruise is used to establish the vehicle and power model, and the vehicle control strategy is built in Matlab/Simulink. According to the current standard requirements, the power and economy of the whole vehicle are calculated. The results show that the power split hybrid vehicle has significantly improved power and economy compared with fuel vehicles. The power-split configuration has certain application advantages in light-duty trucks.
Key Words: Light-Duty Truck; Power-Split; Single Planetary Row; Simulation Analysis
1 引言
《節能与新能源汽车技术路线图2.0》中提出到2025年货车燃油消耗量较2019年降低8-10%,到2035年货车燃油消耗量较2019年降低15-20%,商用车由于经济性效益等限制难以实现全面电动化,未来混合动力技术将成为商用车的关键技术路线,电气化、混动化将成为货车节油的重要措施,在兼顾油耗和排放的同时满足运输要求。
混动动力系统存在多种构型,按照动力耦合方式可以分为串联式、并联式和混联式。串联式混合动力汽车发动机与车轮间无机械连接,发动机能在高效区稳定工作,但能量必须经过两次转换,转换过程存在能量损失;并联式混合动力汽车发动机和电动机都能直接驱动汽车,能量利用率相对较高,但由于发动机与车轮间存在机械连接,发动机不能保证在最佳油耗区工作;混联式包括开关式和功率分流式,结合了串联式和并联式的特点,具备更多的驱动模式,在构型和控制策略最为复杂,但节油效果最佳。
目前,载货汽车混动技术路线包括串联、P2+AMT、单模功率分流式和多模功率分流式,其中主流混动技术路线采用P2+AMT架构,保留了传统AMT变速箱,能够实现多挡直驱,但节油效果有限。轻型载货汽车具备日均工作里程长,在市区和城郊行驶占比大的特点,对于这种应用场景,功率分流式构型节油率更高。本文针对功率分流式构型进行研究,探讨其在轻型载货汽车中的应用。
2 功率分流式混合动力系统
功率分流式混合动力系统主要由一个发动机、两个电机的行星齿轮机构组成。其中行星齿轮机构主要由太阳轮、行星架和齿圈组成,通过三者转速调节,行星齿轮可以实现功率分流,即将发动机动能分别通过机械路径和电路经传递到车轮端。其结构特性使发动机与车轮完全解耦,实现电动无级变速功能,将发动机工作在高效区域,在动力性和燃油经济性具备明显优势[1]。
基于功率分流式结构的混动存在输入分配式构型、输出分配式构型和复合型构型[2],输入式构型采用单个行星排,存在一个机械点,系统在低速处于高效区,高速出现功率循环;输出式构型与输入式构型结构基本一致,两者布置方式不同,存在一个机械点,低速出现功率循环,高速处于高效区;复合式构型采用两个以上行星排组,存在两个机械点,能够保证系统始终工作在高效区,但结构和控制模式过于复杂,生产制造难度大,系统的稳定性、可靠性难以保证,其理论层面研究较为广泛,但实际应用存在较高难度,不适合应用于载货汽车。图1为单行星排中的两种构型。
以行星齿轮机构为核心动力耦合装置的混合动力车型中,输入分配式构型是目前应用最多的类型,其结构相对简单,是研究功率分流式混合动力的基础和关键,也符合轻型载货汽车对整车可靠性的要求,本文针对单行星排构型在轻型载货汽车上的应用进行研究。
2.1 输入分配式构型分析
典型的输入分配式构型,发动机与行星架相连,电机1与太阳轮相连,电机2与齿圈相连,行星排的动力由齿圈输出,其具体结构如图2,该系统将发动机大部分转矩通过齿圈直接传递到驱动轴上,将小部分转矩通过太阳轮轴传给发电机,发电机转化为电能并根据指令用于电池充电或为电机驱动[3]。
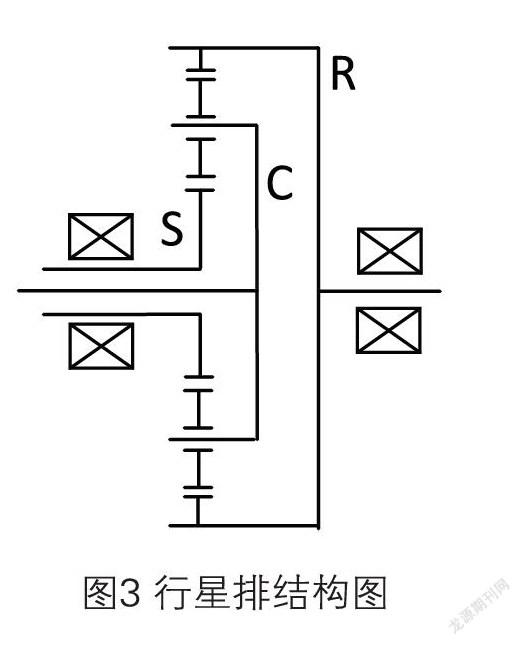
为简化行星排系统分析难度,常将行星机构简化为杠杆模型,齿圈、太阳轮和行星架等效为杠杆模型上的节点,各节点上的位移和受力表示各部件的转速、转矩,力臂RC、CS表示太阳轮和齿圈的齿数并归一化,即 ,一般把k定义为行星排的特征参数,是行星排的物理结构特征,行星机构各部件之间的转速和扭矩关系只与特征参数相关。圖3为行星排结构,图4为经简化后的杠杆模型。
行星排各部件动力学关系如下式:
行星排转速关系:
ns+knr-(k+1)nc=0 (1)
转矩关系:
Ts:Tr:Tc=1:k:-(k+1) (2)
机械路径功率:
(3)
电路径功率:
(4)
输出功率: (5)
k为行星排特征参数;ns:太阳轮转速;nr:齿圈转速;nc:行星架转速;Ts:太阳轮转矩;
Tr:齿圈转矩;Tc:行星架转矩;Pmac:机械路径功率;Te:发动机转矩;Pele:电路径转矩;ng:发电机转速;Tg:发电机转矩;ne:发动机转速;Pout:行星排输出功率。
3 仿真模型建立及验证
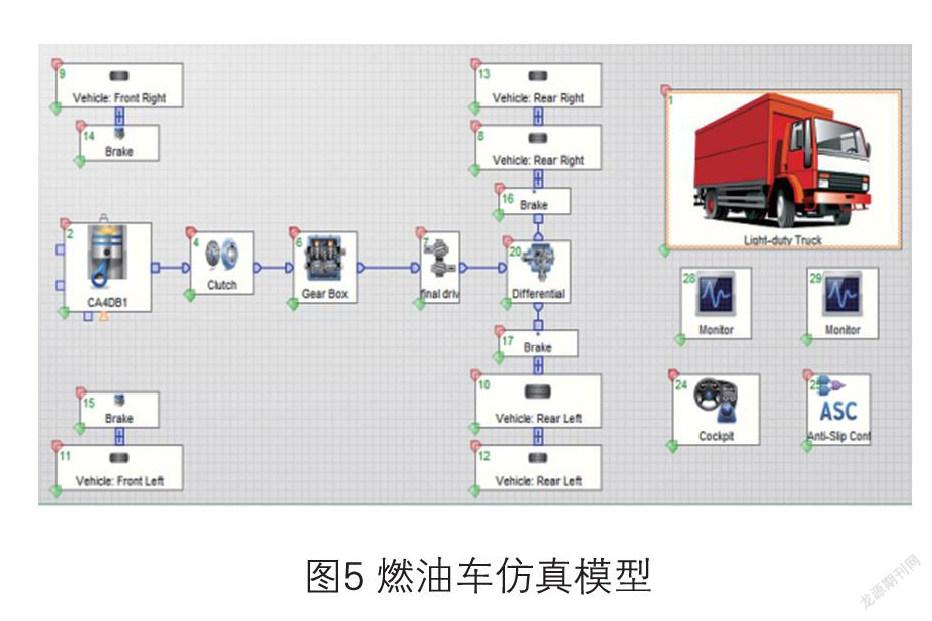
本文采用AVL Cruise搭建整车的物理模型[4],根据现有轻型载货燃油车整车参数及动力总成,搭建燃油车仿真模型,完成发动机、变速箱等模块,然后在燃油车模型的基础上,利用分层功能修改动力系统,增加发动机、电机、电池、行星排等模块,控制策略的搭建在Simulink中完成,并通过Cruise Interface模块进行联合仿真。图5为燃油车仿真模型,图6为功率分流式混动车仿真模型。
3.1 轻型载货汽车整车及动力系统参数
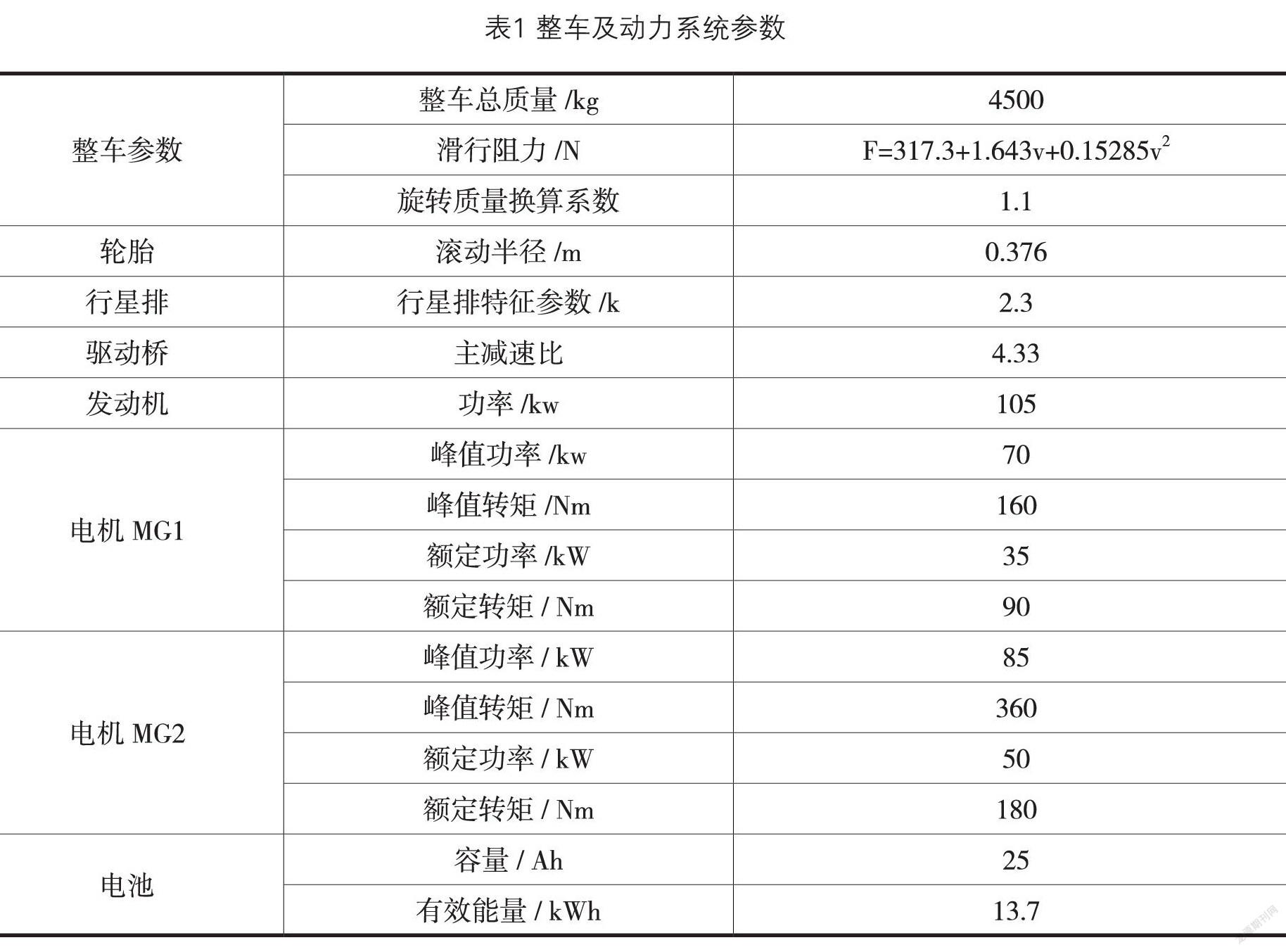
整车参数参照现有燃油车,在采用相同发动机的前提下,对电机、行星排等混动专有部件进行匹配,考虑目前电机性能、成本和载货汽车动力性要求,在驱动电机与齿圈间增加一个两挡变速箱,整车及动力系统参数见表1。
3.2 工作模式
车辆在实际工作过程中需要根据车速、油门踏板开度、制动踏板开度和电池电量情况等因素来判断并切换工作模式。对于行驶需求来讲,本系统能够实现纯电模式、混动模式、发动机直驱、再生制动模式和停车充电模式[5]。利用杠杆模型和能量流向图对各工作模式分析。
3.2.1 纯电模式
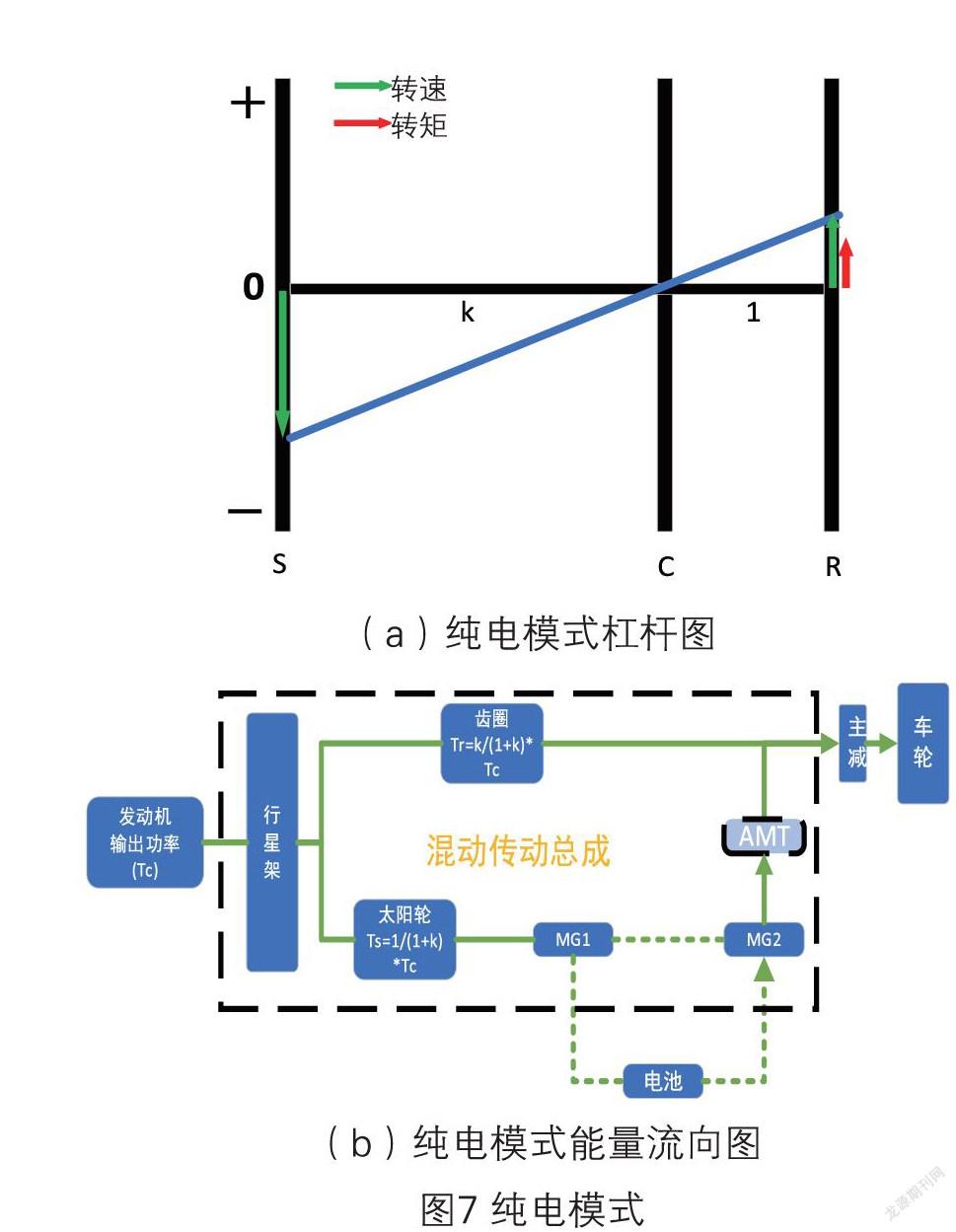
当整车需求功率较小且电池SOC满足纯电行驶要求时,整车处于纯电模式;此时电池作为动力源,MG2电机提供驱动扭矩,发动机自身存在摩擦阻力,处于静止状态,而MG1电机在MG2的带动下随转,根据行星排工作原理,MG1转速是齿圈处的k倍,为防止MG1转速过高,需要限制纯电最高车速或者通过启动发动机降低MG1转速。纯电工作模式如图7所示。
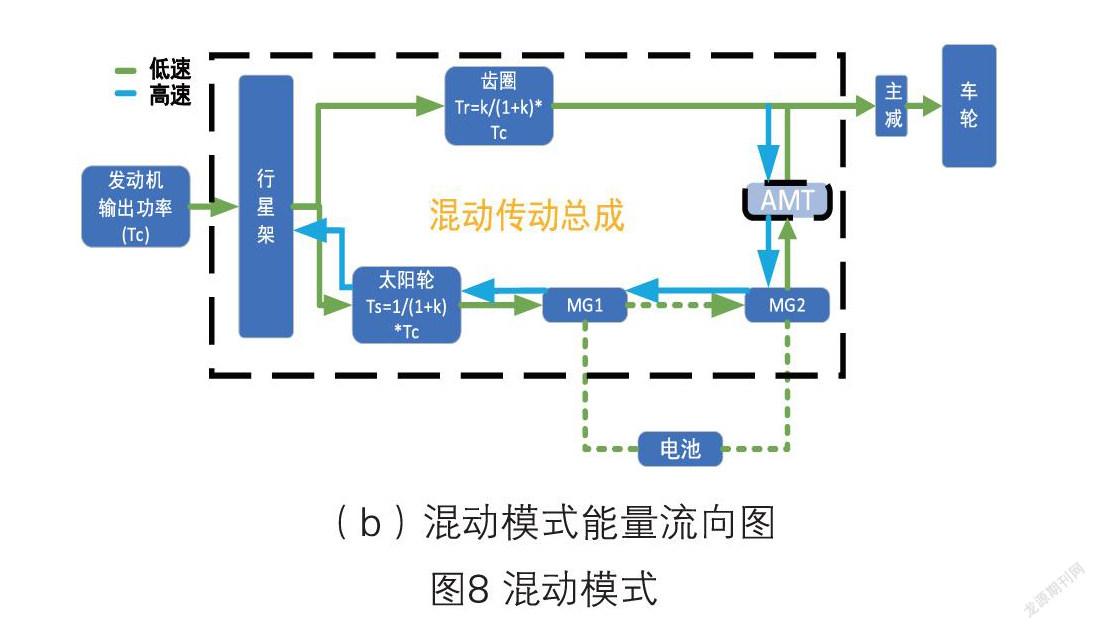
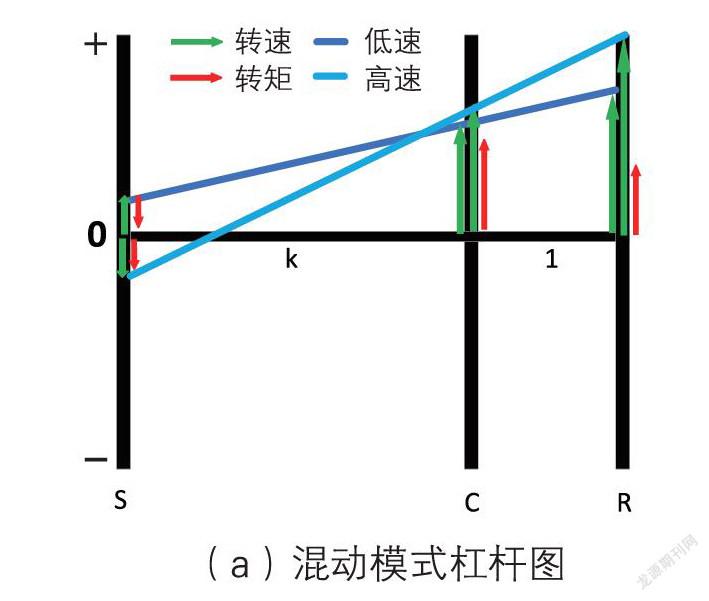
3.2.2 混动模式
当整车需求功率增大或者电池SOC不满足纯电行驶要求时,整车进入混动模式,调节MG1扭矩来启动发动机。
实际车速不高的情况下,MG1电机在发动机的带动下正转进行发电,发动机的输出功率通过行星排机构分成机械功率和电功率,机械功率在齿圈处输出,电功率经过太阳轮、MG1电机、MG2电机、两挡箱,在齿圈处汇合,最终一同驱动车辆行驶,驱动所需动力由发动机提供,处于电量保持状态,并且根据实际功率需要,电池可以动态调节完成充放电。MG1电机在发电的同时调控发动机工作在最优工作曲线上。混动工作模式如图8所示:
实际车速较高的情况下,MG1电机由正转变成反转,此时,MG2电机进入发电状态,将齿圈处功率转换为电能提供给MG1,MG1电机通过消耗电能来保证发动机工作在最优工作曲线上,形成了功率循环,这样发动机依然工作在高效区间,但整车传动效率下降,节油效果不理想。
3.2.3 发动机直驱模式
为了提高整车传动效率,车辆行驶在较高车速时,将太阳轮锁住,发动机功率全由机械路径输出,直接驱动车轮。此模式发动机不再工作在最优工作曲线上,MG2电机根据实际需求辅助驱动或制动能量回收。发动机直驱工作模式如图9所示:
3.2.4制动模式
驾驶员踩下制动踏板,车辆进入到制动模式,在电池SOC、行驶车速、制动踏板开度同时满足能量回收要求时,MG2电机提供全部制动力,混动模式下发动机停止喷油,纯电模式发动机静止,MG1处于随转。
MG2扭矩不能满足制动力矩要求时,由机械制动来补充,在电池电量充足或者行驶速度过低或者急踩制动踏板时,直接由制动器提供全部制动力。制动工作模式如图10所示:
3.3 能量管理策略
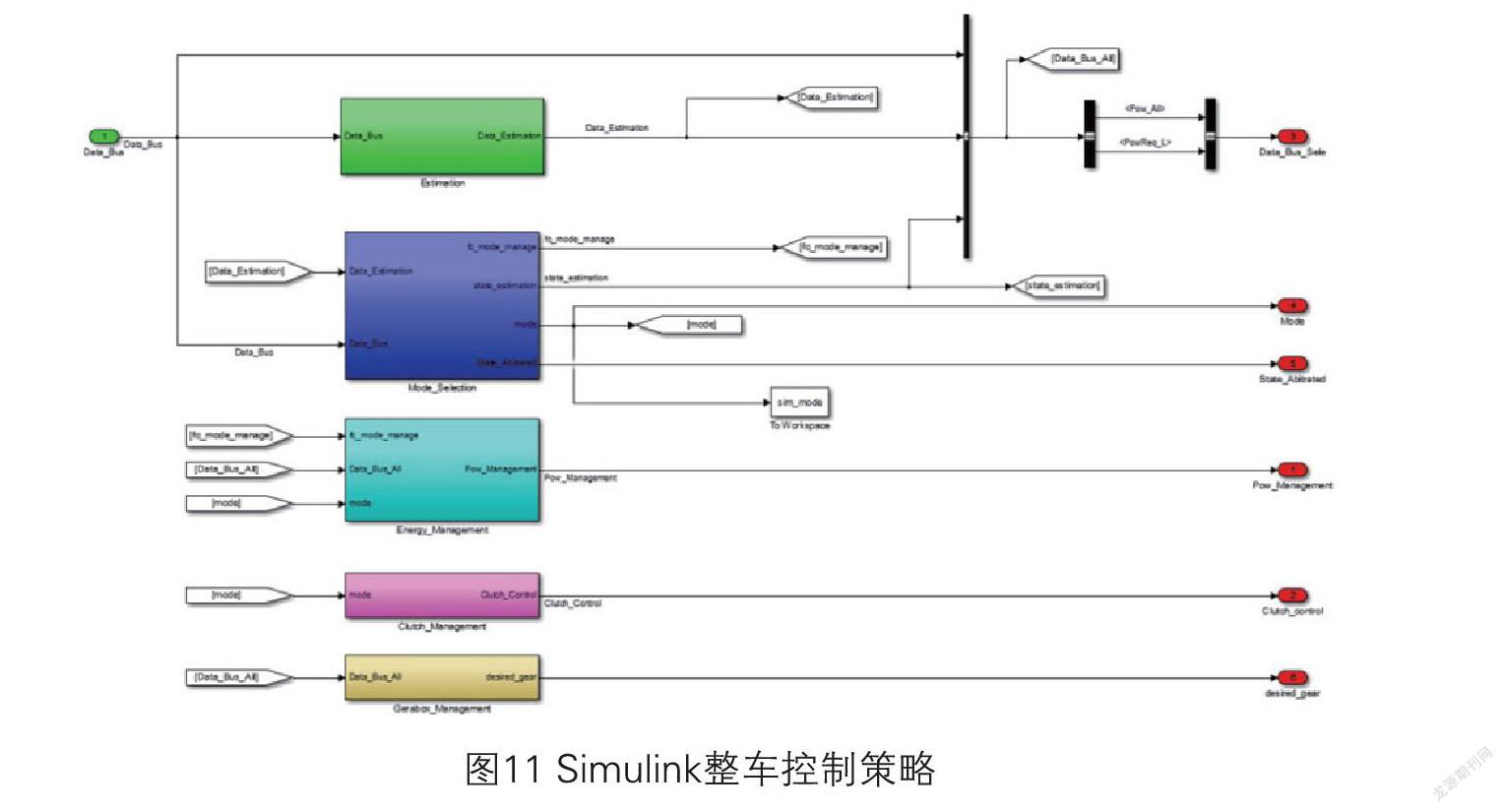
本文采用发动机最优控制和基于规则的门限策略,通过发电机调速控制,将发动机始终控制在最优工作曲线上,并在确定的规则下进行模式判断,本策略在提高发动机效率的前提下,保证控制过程可靠有效,在实车策略中易实现。
能量管理策略在simulink中完成,控制策略主要实现驱动功能,对附件需求进行简化,包括输入输出信号处理,需求估算,模式判断仲裁和能量分配模块。其基本逻辑:需求估算模量根据输入信号估算需求,包括动力系工作状态和整车需求功率等,模式判断仲裁模块再根据计算结果判断工作模式,并通过有限状态机完成模式切换,然后在能量分配模块控制对应模式的动力源扭矩、功率和工作状态。
4 仿真结果
分别仿真计算燃油车和功率分流混动车的性能指标,动力性参照《GB/T 19752-2005 混合动力电动汽车动力性能试验方法》设定仿真工况,计算最高车速、最大爬坡度和0-50km/h加速时间,考虑到用户实际使用习惯,动力性计算载质量设定为6000kg,经济性计算参照《GB/T 38146.2-2019 中国汽车行驶工况》循环工况,货车(GVW≤5500kg)使用CHTC-LT工况计算百公里油耗[6]。由于混动存在燃油消耗和电量损耗,需要转化为等效油耗,转化过程存在误差,本文通过调节充电功率大小和充电门限,实现循环工况仿真前后SOC电量维持平衡,这样燃油消耗结果即为最终油耗。具体计算结果如表2。
功率分流式混动车在最高车速和极限加速上有明显提升;持续最高车速的情况下,电池不再提供动力,且发动机进入直驱模式,太阳轮锁死,行星齿轮作为减速器,减速比为0.68,此时混动车实际的工作方式与燃油车一致,两者持续最高车速相同;最大爬坡度与一挡减速比有直接关系,燃油车一挡使用大速比,而混动车选用的两挡箱只用于提高驱动电机扭矩,混动车爬坡性能低于燃油车,但能够满足实际爬坡性能指标。
CHTC-LT循环工况下,燃油车百公里油耗12.1L,与转毂试验台综合油耗结果值基本一致,混动车百公里油耗为10.0L,节油率为17%,节油效果较好,考虑到制动回馈、模式切换门限等策略因素对油耗都有影响,通过优化控制策略能够进一步提升油耗。
5 结束语
本文对功率分流式构型在轻型载货汽车上应用做了相关研究,分析了功率分流式构型的基本结构和工作原理,并使用仿真软件建立了混动模型及相应控制策略,完成了动力性和经济性的计算,并和燃油车对比分析,仿真结果表明,功率分流式构型对于轻型载货汽车综合性能有显著提高,具备很好的应用价值。
参考文献:
[1]商用车混合动力系统关键技术[M].北京:机械工业出版社,2019.
[2]靳更超. 单行星排插电式混合动力汽车构型与控制策略研究[D].重慶大学,2018.
[3]李宏程. 物流车行星混合动力系统能量管理优化与实时应用研究[D].吉林大学,2019.
[4]蒋奕权. 基于CRUISE的混合动力汽车动力性研究[D].河北工程大学,2018.
[5]石万凯,秦鹏飞,杨亚联,罗才伟,邱红友.新型动力耦合系统工作模式分析与参数匹配研究[J].机械设计,2016,33(10):5-10.
[6]GB/T 38146.2-2019 中国汽车行驶工况.
猜你喜欢
科学与财富(2016年18期)2016-12-22
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
中小企业管理与科技·上旬刊(2016年10期)2016-11-15
科技视界(2016年15期)2016-06-30
科技视界(2016年8期)2016-04-05
科技视界(2016年7期)2016-04-01
中国市场(2016年8期)2016-03-07
光学仪器(2015年1期)2015-07-30
